99312_UR5_User_Manual_zh_E67ON_Global.pdf - 第154页
U R5 1 44 用 户 手 册 版 权 所 有 © 2 009–2021U ni ver s al R obots A/S 。 保 留 所 有 权 利 。
此选项卡提供了一种非常简便的机器人手臂和控制箱操作方法,使用尽可能少的几个按钮和
选项即可完成操作,这可与保护 PolyScope 编程部分的密码( 请参阅1.26.3. 设置密码 在本页
196) 有效结合,使机器人成为一个可以专门运行预先编写的程序的工具。
此外,在此选项卡中,可以根据外部输入信号沿过渡自动加载和启动默认程序( 请参阅1.24.15.
安装设置 → 默认程序 在本页138) 。自动加载和启动默认程序,开机时自动初始化等,可以用
于将机器人手臂整合进其他机器。
用 户 手 册 143 UR5
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
UR5 144 用 户 手 册
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
1.25. 编程
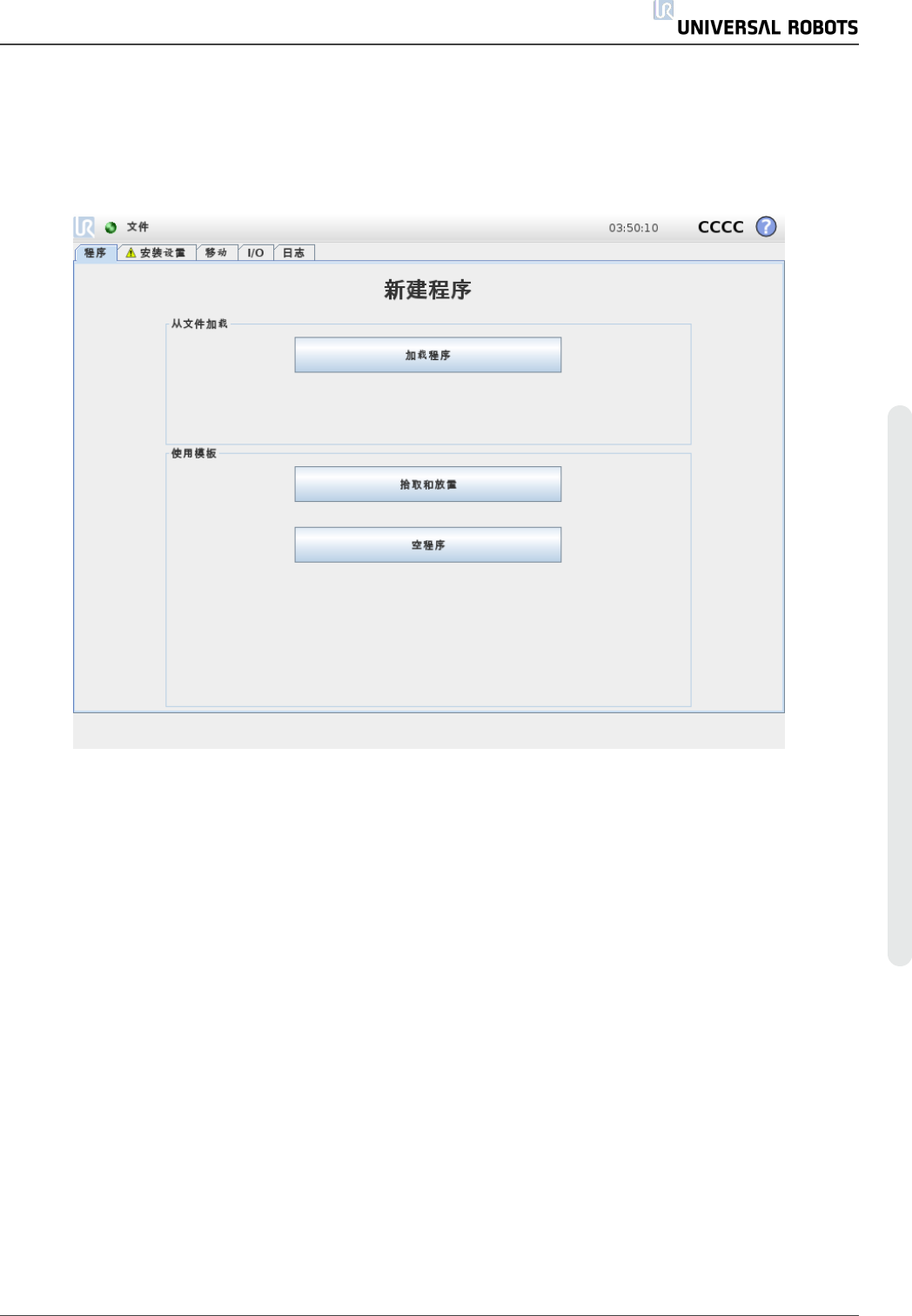
1.25.1. 新建程序
可以通过使用
模板
或参照现有( 已保存的) 机器人程序创建新的机器人程序。
模板
可以提供整
个程序结构,因此只需填写程序的详细信息。
用 户 手 册 145 UR5
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。