99312_UR5_User_Manual_zh_E67ON_Global.pdf - 第174页
1.2 5.12. 命 令 : 弹 出 窗 口 弹 出 窗 口 是 当 程 序 运 行 至 程 序 树 中 的 “ 弹 出 窗 口 ” 节 点 时 在 屏 幕 上 显 示 的 消 息 。 在 “ 命 令 ” 选 项 卡 下 , 点 按 空 白 字 段 , 然 后 使 用 屏 幕 键 盘 为 弹 出 消 息 创 建 文 本 内 容 。 消 息 被 限 制 为 最 多 255 个 字 符 。 如 果 您 希 望 在 弹 出 消 息 中 显 …
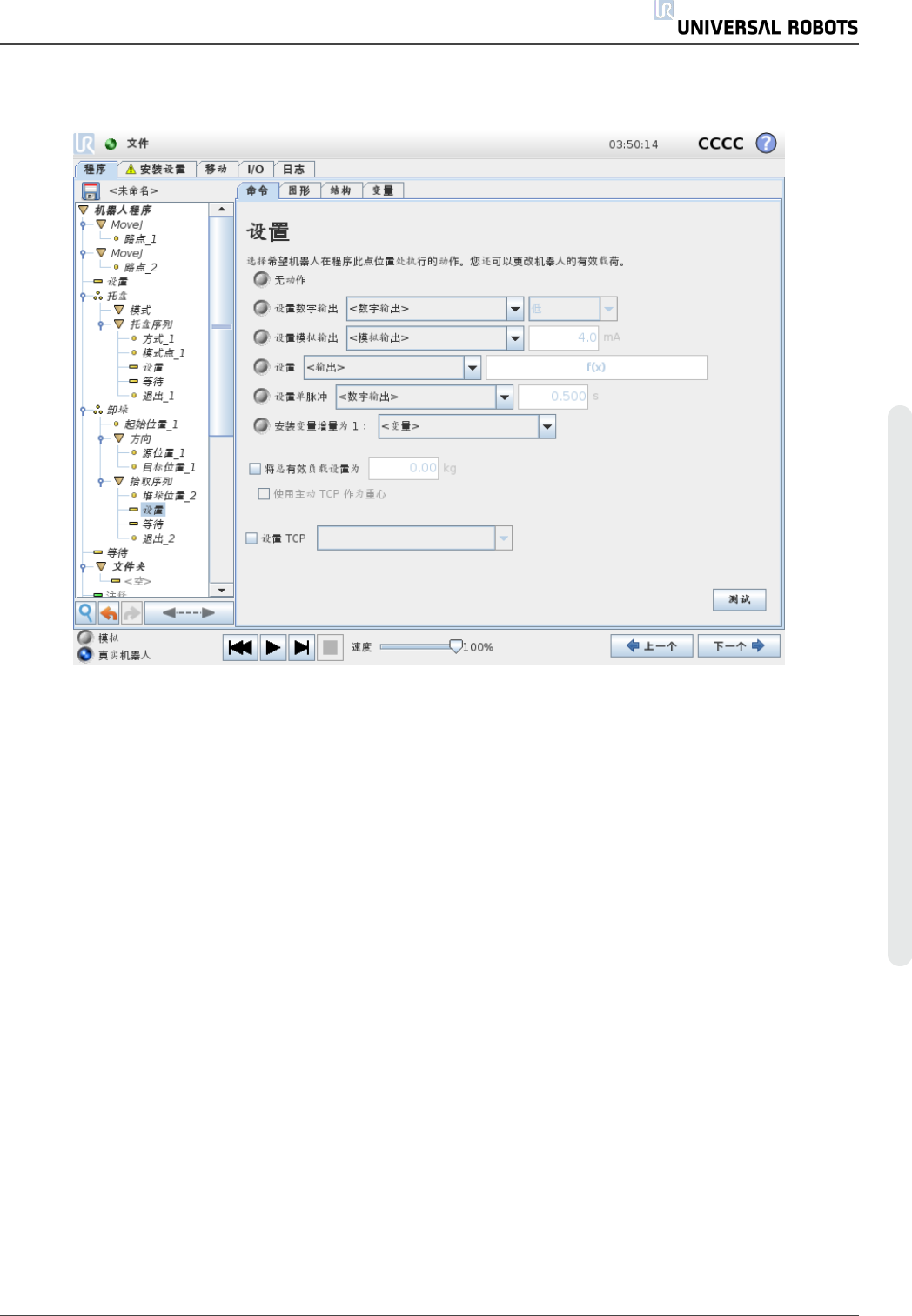
1.25.11. 命令:设置
将数字输出或模拟输出设置为给定值。数字输出也可以设置为发送单个脉冲。
使用设置命令设置机器人手臂的有效载荷。如果工具处承受的重量与预期有效载荷不同,您
可以调整有效载荷重量,以避免触发机器人保护性停止。如果激活的 TCP 不应用作重心,则
必须取消选中对应的复选框。
也可以使用设置命令修改激活的 TCP,方法是选中对应的复选框并从菜单中选择一个 TCP 偏
移。
如果在编写程序时为特定运动指定的激活 TCP 已知,请考虑改用移动卡上的 TCP 选择( 请参
阅1.25.4. 命令:移动 在本页149) 。有关配置指定 TCP 的更多信息,请参阅1.24.6. 安装设置 →
TCP 配置 在本页117。
用 户 手 册 163 UR5
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
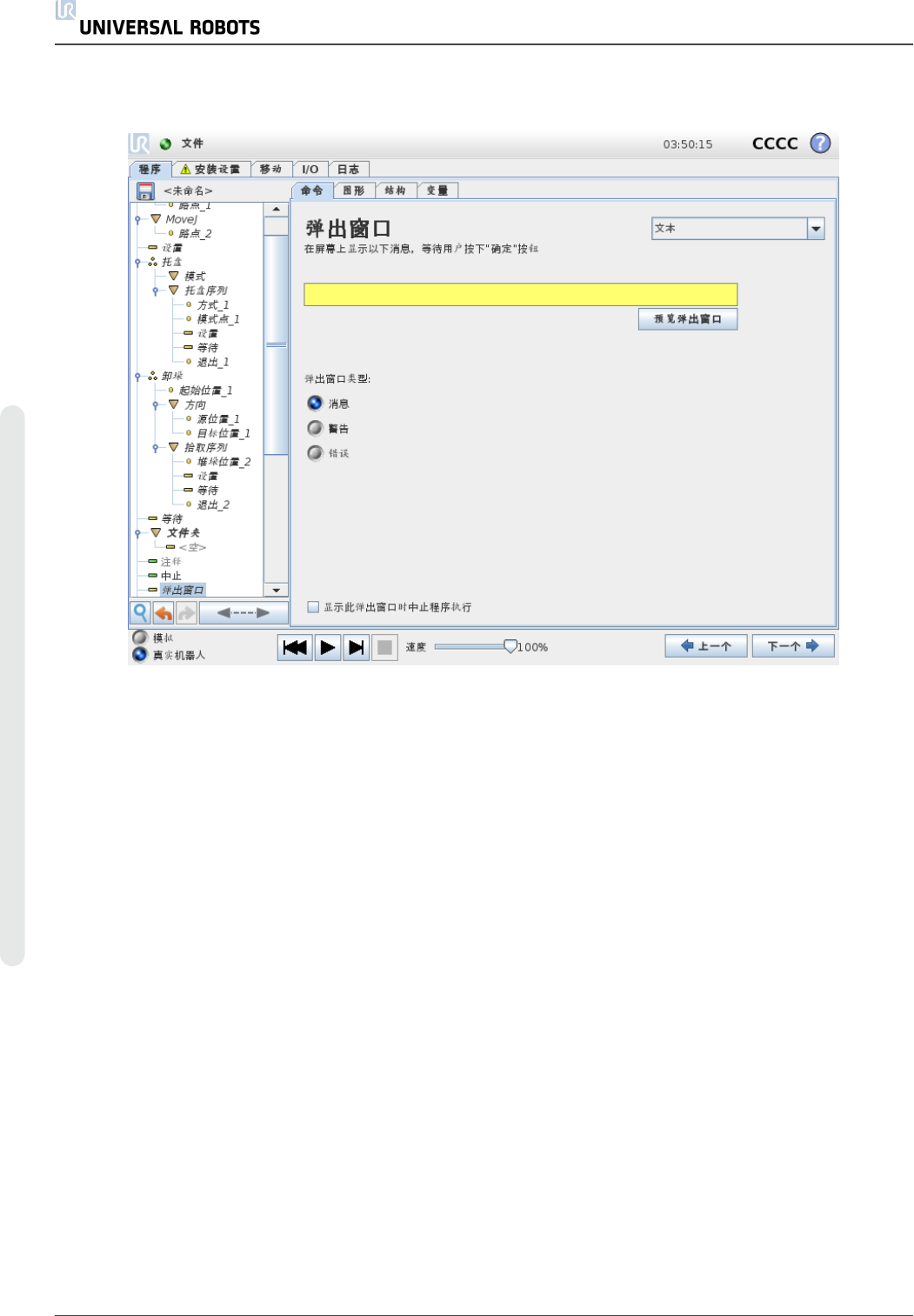
1.25.12. 命令:弹出窗口
弹出窗口是当程序运行至程序树中的“弹出窗口”节点时在屏幕上显示的消息。在“命令”选项卡
下,点按空白字段,然后使用屏幕键盘为弹出消息创建文本内容。消息被限制为最多 255 个字
符。
如果您希望在弹出消息中显示变量而不是文本,则可以选择文本下拉菜单。
您也可以选择显示此弹出窗口时中止程序执行,以使程序在出现弹出窗口时停止。
在程序执行期间,当出现弹出消息时,请在弹出对话框中点按确定以继续执行程序。
UR5 164 用 户 手 册
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
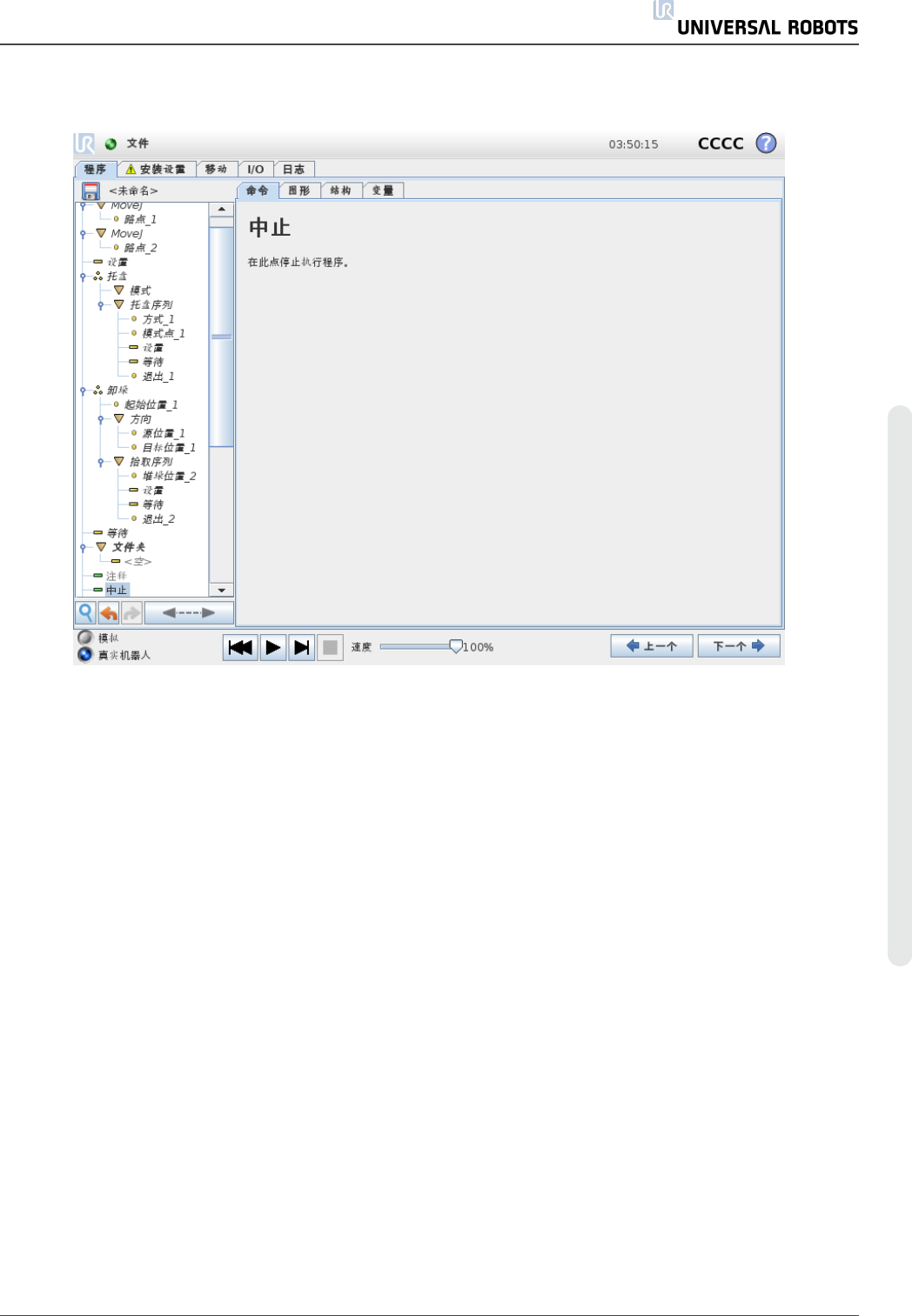
1.25.13. 命令:中止
程序将在该点停止运行。
用 户 手 册 165 UR5
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。