99312_UR5_User_Manual_zh_E67ON_Global.pdf - 第230页
2. 术 语 停 机 类 别 0 当 机 器 人 的 电 源 被 切 断 后 , 机 器 人 立 刻 停 止 工 作 。 这 是 不 可 控 的 停 止 , 由 于 每 个 关 节 会 以 最 快 的 速 度 制 动 , 因 此 机 器 人 可 能 偏 离 程 序 设 定 的 路 径 . 当 超 过 安 全 评 定 极 限 , 或 当 控 制 系 统 的 安 全 评 定 部 分 出 现 错 误 的 情 况 下 方 可 使 用 这 种 …
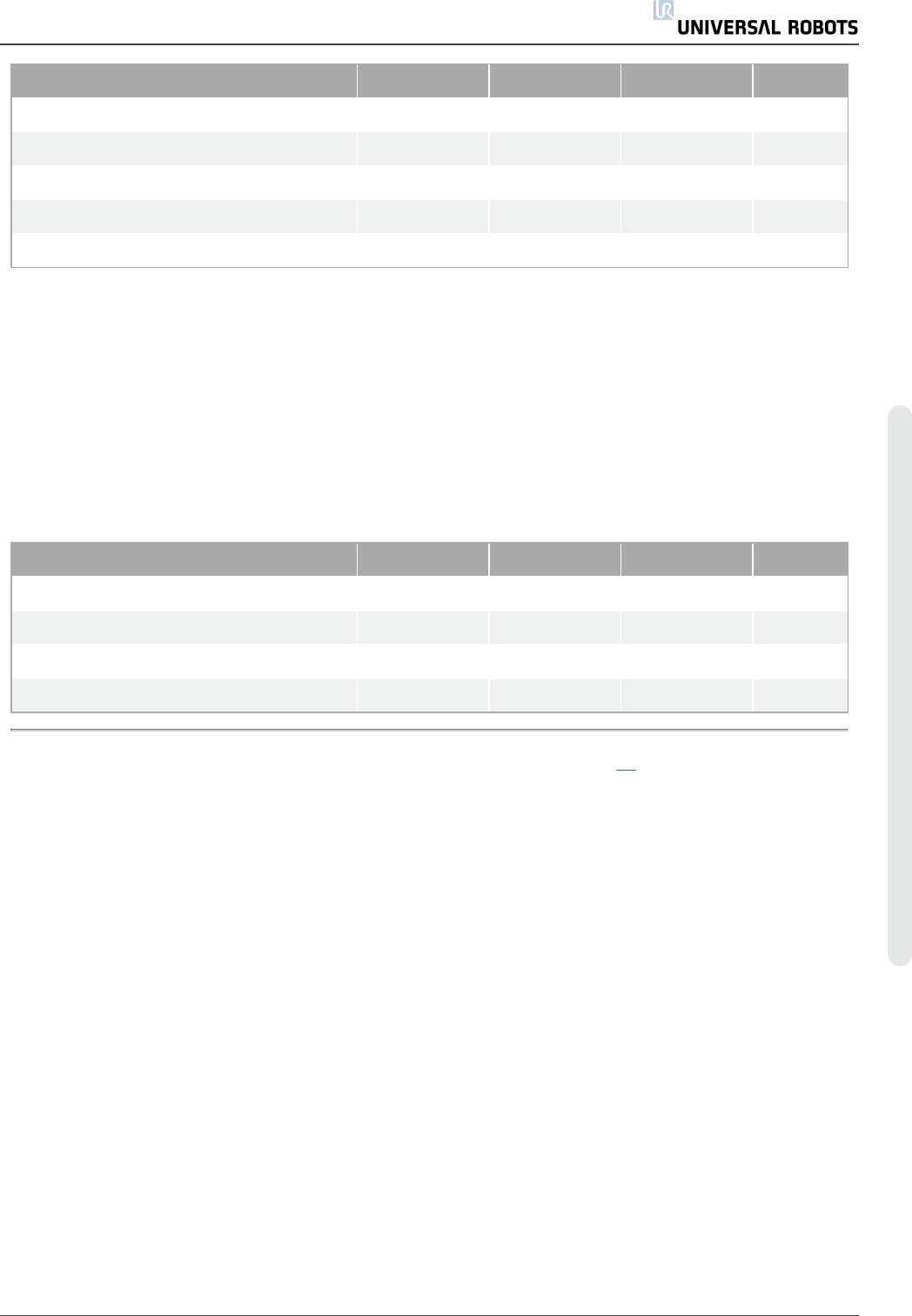
参数 最小值 典型值 最大值 单位
输入电压 -30 24 30 V
确保关闭输入的条件 -30 - 7 V
确保打开输入的条件 10 - 30 V
确保关闭的条件 0 - 5 mA
打开电流 (10-30V) 6 - 10 mA
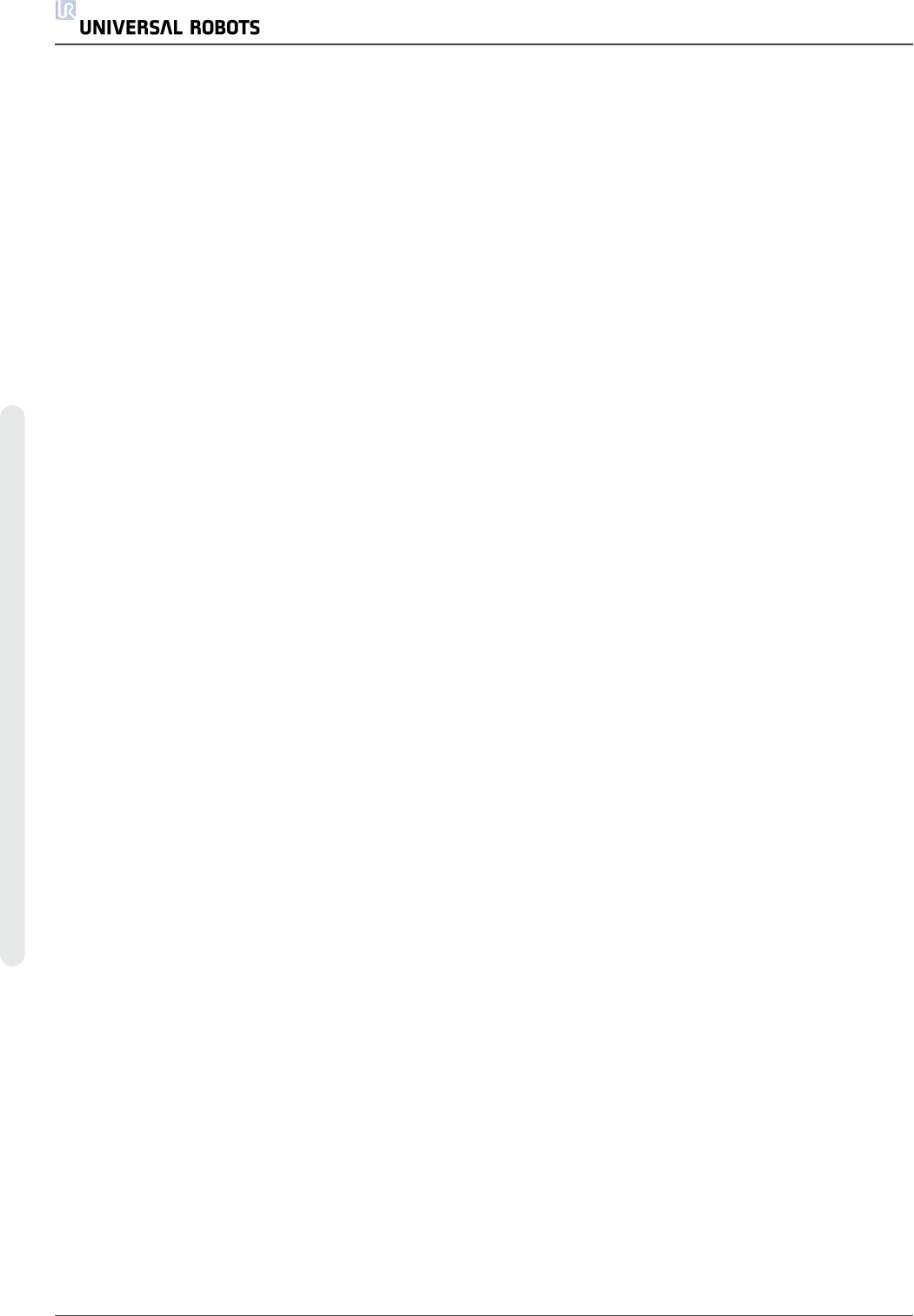
1.31.4. 数字输出
数字输出端以 pnp 的形式工作且与 IMM 耦合连接。IMM 与机器人电势端接子之间的电位隔离
符合 IEC 60664-1 和 EN 60664-1 的有关规定,污染等级为 2,过电压类别为 II。这些输出端在构
造上符合 IEC 61131-2 和 EN 61131-2 标准中所定义的所有三种数字输入端的有关规定,并满
足这些标准对数字输出端的所有要求。
数字输出端利用 IMM 24V 电源提供的数毫安电流控制并加偏压于晶体管,从而形成固态继电
器。
参数 最小值 典型值 最大值 单位
每个输出端的拉电流 0 - 120 mA
打开时的压降 0 0.1 1 V
关闭时的泄漏电流 0 0 0.1 mA
利用的 IMM 24V 电流 - 12 25 mA
1. 停机类别符合 ISO 13849-1,请参见术语表了解更多详细信息。↩
用 户 手 册 219 UR5
EUROMAP 67 Interface
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
2.术语
停机类别 0
当机器人的电源被切断后,机器人立刻停止工作。这是不可控的停止,由于每个关节会以
最快的速度制动,因此机器人可能偏离程序设定的路径.当超过安全评定极限,或当控制
系统的安全评定部分出现错误的情况下方可使用这种保护性停止。有关更多信息,请参阅
ISO13850 或 IEC60204-1。
停机类别 1
当为机器人供电使其停止时,机器人就停止,当机器人实现停止后切断电源。这是可控性
停止,机器人会遵循程序编制的路径。一旦机器人站稳后就将电源切断。有关更多信息,
请参阅 ISO13850 或 IEC60204-1。
停机类别 2
机器人通电时的可控性停止。安全评定控制系统的操控可使机器人停留在停止的位置。有
关更多信息,请参阅 IEC60204-1。
3 类
术语
类别
不应与术语
停机类别
相混淆。
类别
是指用作某个
性能等级
基础的架构类型。
3 类
架
构的一个显著特性是发生单一故障时不会导致安全功能丧失。有关更多信息,请参阅
ISO13849-1。
性能等级
性能等级( Performance Level, PL) 是一个分离的等级,它用于说明控制系统中各个与安全
相关的部分在可预测的条件下执行安全功能的能力。PLd 是第二高的可信度分类,它意味
着安全功能相当值得信赖。有关更多信息,请参阅 ISO13849-1。
诊断覆盖率( DC)
用于衡量为了达到评定的性能等级而实施的诊断的有效性。有关更多信息,请参阅
ISO13849-1。
平均危险失效时间 ( MTTFd)
平均危险失效时间( MTTFd) 指的是为了达到评定的性能等级而进行计算和检测所得的
值。有关更多信息,请参阅 ISO13849-1。
集成商
集成商即设计机器人最终安装的机构。集成商负责进行最终风险评估,必须确保最终安装
遵循当地的法律法规。
风险评估
风险评估即识别所有风险并将风险降低到适当程度的整个过程。风险评估应进行记录存
档。请参考 ISO 12100 了解更多信息。
合作机器人应用
术语
协作
是指在机器人应用中操作员与机器人之间的协作。有关准确的定义和描述,请参
见 ISO 10218-1 和 ISO 10218-2。
安全配置
安全相关功能和界面可通过安全配置参数来配置。它们通过软件界面进行定义,请参阅第
II 部分PolyScope 手册 在本页79。
UR5 220 用 户 手 册
2.术 语
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
2.1. Index
A
add Action 161
AfterEnd 183
Anchor Position 182
B
Base 99, 151
Base feature 129
BeforeStart 183
Blend parameters 153
Blending 152
Box pattern 178-179
C
Configurable I/O 29
control box 27-28, 43, 64, 103, 113, 139
Control Box 1, 124, 187
Conveyor Tracking 187
Conveyor Tracking Setup 137
D
Direction Vector 160
E
Ethernet 41
用 户 手 册 221 UR5
2.术 语
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。