99312_UR5_User_Manual_zh_E67ON_Global.pdf - 第150页
机 器 人 日 志 信 息 显 示 在 屏 幕 的 下 半 部 分 。 第 一 列 将 日 志 记 录 的 严 重 性 分 类 。 第 二 列 显 示 消 息 的 到 达 时 间 。 下 一 列 显 示 消 息 发 送 人 。 最 后 一 列 显 示 具 体 消 息 。 消 息 可 以 通 过 选 择 切 换 按 钮 ( 与 日 志 记 录 的 严 重 性 相 对 应 ) 进 行 过 滤 。 上 图 指 出 错 误 将 会 被 显 示 …
在启动时,当前输入信号电平未定义。在启动时选择与信号电平相匹配的转换会立即启动程
序。此外,离开运行程序屏幕或点按仪表板中的“停止”按钮将禁用自动启动功能,直到再次按
下“运行”按钮为止。
自 动 初 始 化
机器手臂会自动初始化。在指定的外部输入信号沿过渡时,机器人手臂将完全初始化,而不考
虑可见的屏幕。
解除刹车是最后的初始化阶段。在解除刹车期间,机器手臂发出轻微的移动和卡嗒声。另外,
如果配置的安装角度与( 基于传感器数据) 得到的安装角度不相符,数据刹车将不能自动释
放。在这种情况下,必须在初始化屏幕( 请参阅1.22.6. 初始化屏幕 在本页104) 上对机器人进行
手动初始化。
在启动时,当前输入信号电平未定义。在启动时选择与信号电平相匹配的过渡会立即启动机
器人手臂。
仅当机械人手臂断电时,自动初始化特征才工作。
1.24.16. 日志选项卡
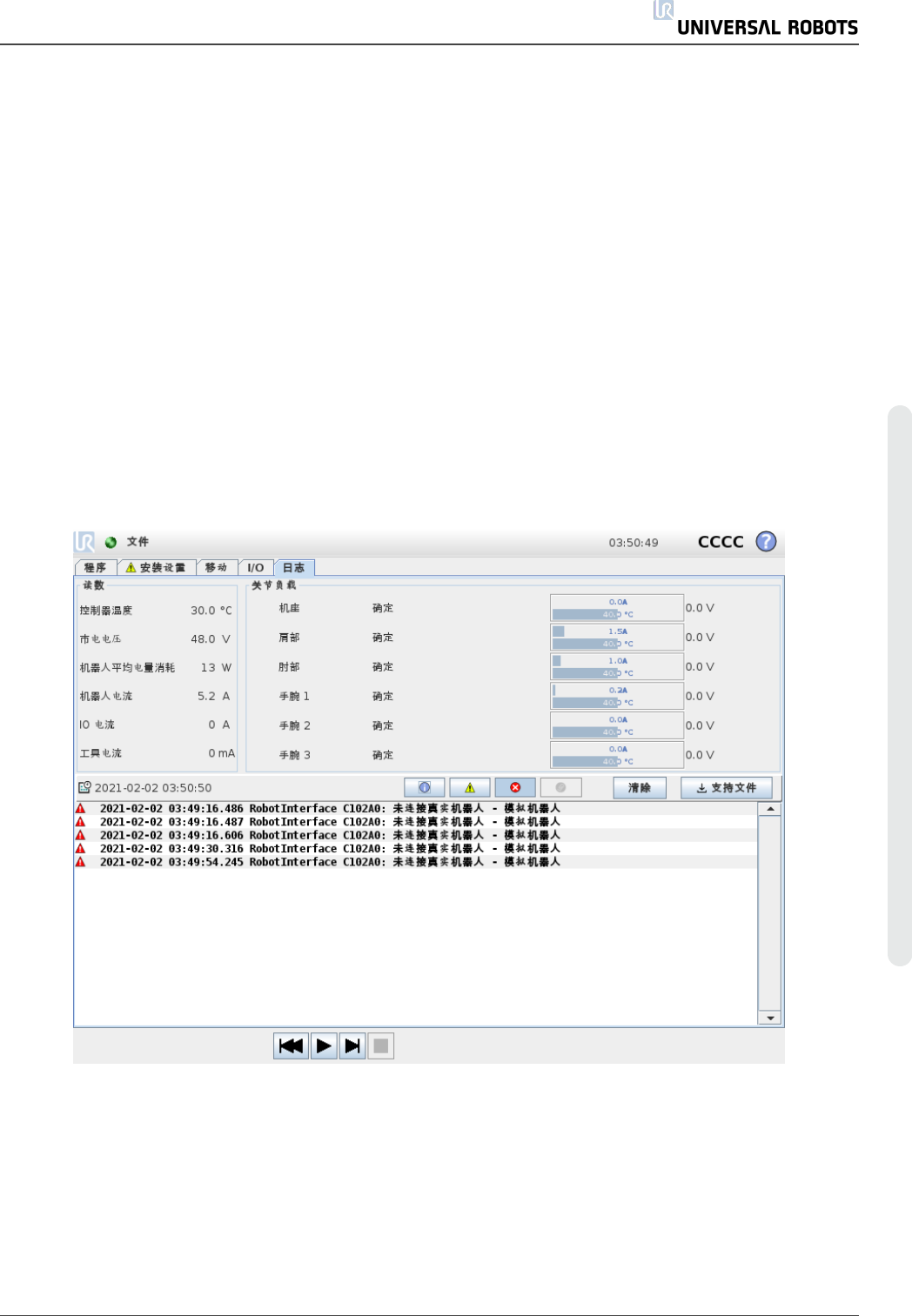
机 器 人 状 况
屏幕的上半部分显示机器人手臂和控制箱的“运行状况”。
屏幕左侧显示与控制器相关的信息,而屏幕右侧显示机器人关节信息。每个关节显示电机和
电子部件的温度、关节载荷和电压。
用 户 手 册 139 UR5
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
机 器 人 日 志
信息显示在屏幕的下半部分。第一列将日志记录的严重性分类。第二列显示消息的到达时间。
下一列显示消息发送人。最后一列显示具体消息。消息可以通过选择切换按钮( 与日志记录的
严重性相对应) 进行过滤。上图指出错误将会被显示出来,而信息和警告消息将会被过滤。一
些日志消息的设计初衷就是提供更多信息,可以通过选定日志记录进行访问。
保 存 错 误 报 告
一旦 PolyScope 发生错误,就会生成错误日志。在“日志”选项卡中,您可以跟踪生成的报告和/
或将其导出到 USB 驱动器( 请参阅1.24.16. 日志选项卡 上一页) 。可以跟踪并导出以下错误列
表:
• 故障
• 内部 PolyScope 例外
• 保护性停止
• URCap 中未处理的异常
• 违例
导出的报告包含用户程序、历史日志、安装和运行服务列表等。
错 误 报 告
当日志行中出现回形针图标时,可以使用详细的状态报告。
• 选择日志行并点击保存报告按钮将报告保存到 USB 驱动器。
• 报告可以在程序运行时保存。
提示
生成一个新报表时,最旧的报表将被删除。只有最近的五个报告被存储。
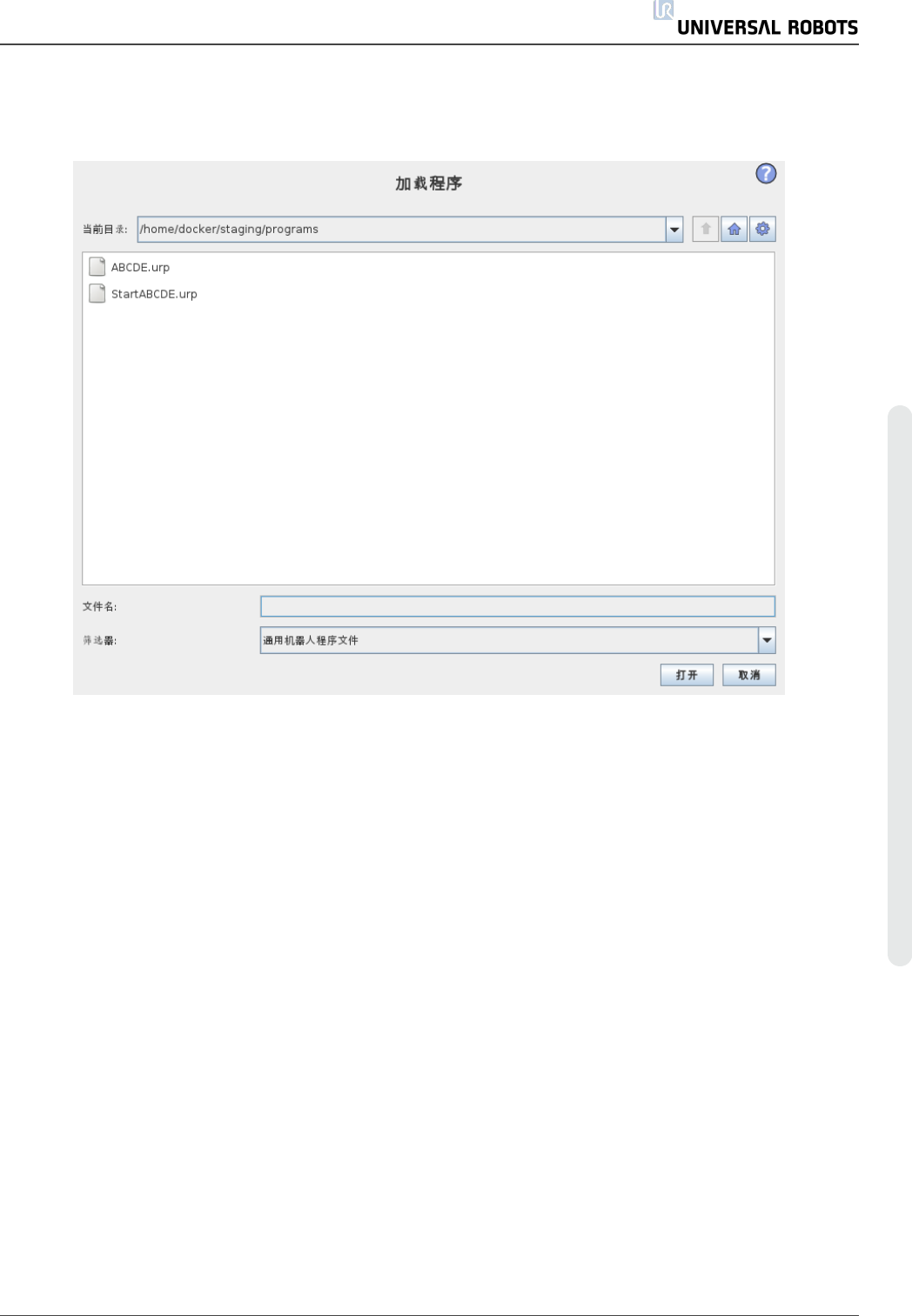
1.24.17. 加载屏幕
在此屏幕,您可选择要加载的程序。此屏幕有两个版本:一个用于加载程序和执行程序,一个
用于编辑程序。
提示
不建议从 USB 设备运行程序。要运行存储在 USB 驱动器上的程序,请先加载
该程序,然后使用文件菜单中的另存为… 选项将其保存在本地programs文件
夹中。
主要差异在于用户可执行的是哪个。在基本加载屏幕中,用户只能访问文件 - 不能修改或删除
文件。此外,不允许用户离开源自程序文件夹的目录结构,用户可以向下展开至子目录,但无
法浏览高于程序文件夹的目录。
UR5 140 用 户 手 册
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
因此,所有程序都应放在程序文件夹和/或程序文件夹下的子文件夹。
屏 幕 布 局
上图显示的是实际的加载屏幕。包含下述重要区域和按钮:
路径历史记录
路径历史记录显示访问至当前位置所经过的路径的位置。这意味着,屏幕上将显示直至计算
机根目录的所有父目录。此处,你会发现你可能无法访问程序文件夹以上的所有目录。
通过在列表中选择文件夹名称,加载对话框将更改为该目录并将其显示在文件选择区域( 请参
阅文件选择区域 向下) 中。
文件选择区域
在对话框的此区域,将显示实际的目录。通过这个,用户可以单击文件名称选定文件,或双击
文件名称打开文件。
长按大约 0.5 秒可选中目录。单击向下访问文件夹并显示其内容。
文件筛选器
使用文件筛选器,用户可设定仅显示自己想要显示的文件类型。通过选择备份文件,文件选择
区域将显示每个程序最近保存的 10 个版本,其中 .old0 是最新版本,.old9 是最旧版本。
用 户 手 册 141 UR5
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。