99312_UR5_User_Manual_zh_E67ON_Global.pdf - 第52页
参 数 最 小 值 典 型 值 最 大 值 单 位 通 信 速 度 10 - 100 0 M b/s 1.9 .6. 电 源 连 接 控 制 箱 市 电 电 缆 末 端 有 一 个 标 准 IE C 插 头 。 将 当 地 专 用 的 市 电 插 座 或 电 缆 连 接 到 IEC 插 头 。 要 使 机 器 人 通 电 , 控 制 箱 必 须 与 电 源 相 连 。 这 个 过 程 必 须 使 用 相 应 的 IEC C 1 9 电 …
小心
1. 在电流模式下,模拟输入没有提供过电压保护。超过电气规范中的极限
可能导致输入端永久损坏。
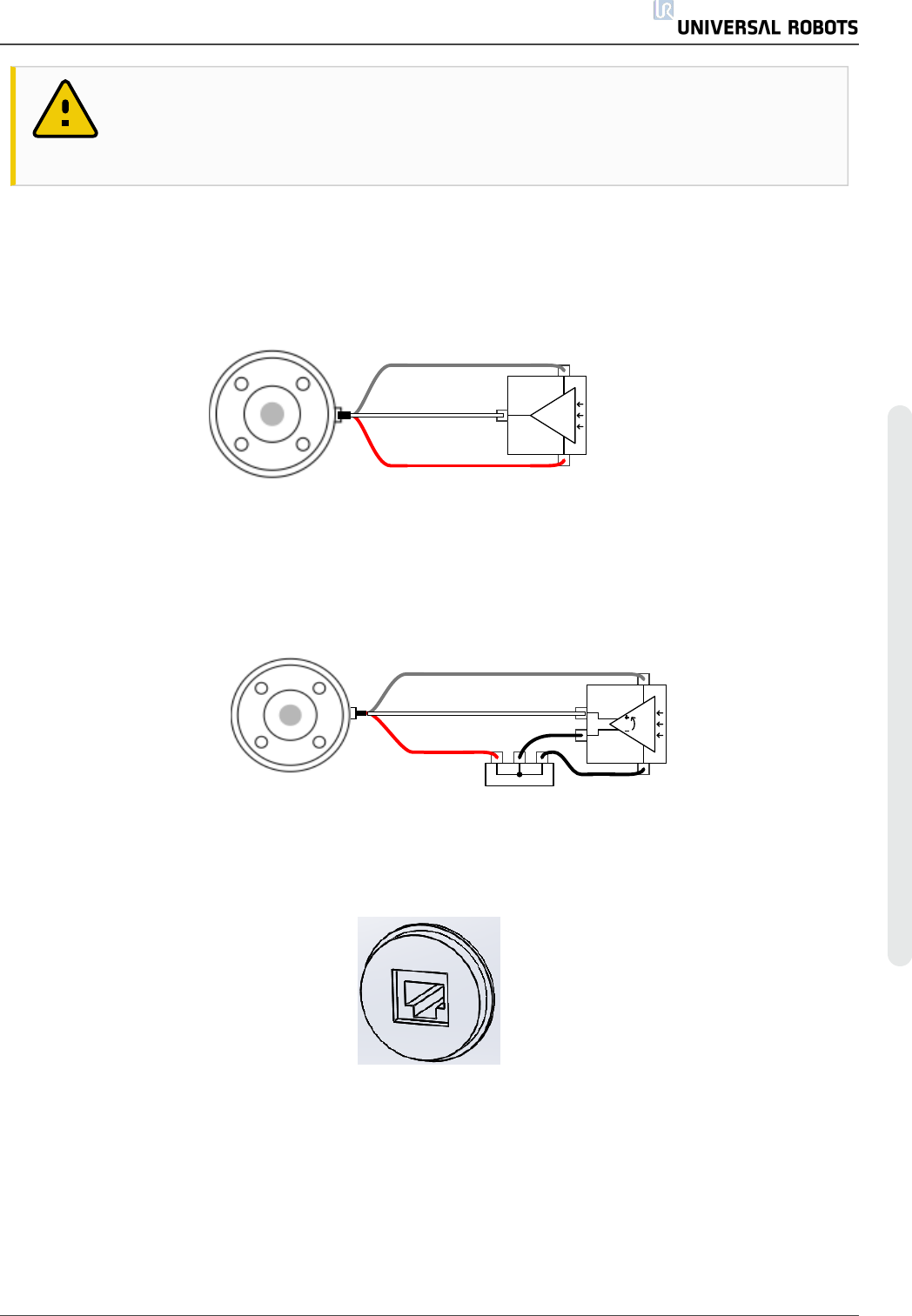
使 用 工 具 模 拟 输 入 ,非 差 分
下例显示了模拟传感器与非差分输出的连接方式。只要模拟输入的输入模式设置与 I/O 选项
卡中的设置相同,那么传感器的输出端可设置为电流模式,也可设置为电压模式。请记得检查
并确保带有电压输出端的传感器可以驱动工具的内部电阻,否则测量值可能无效。
GND
POWER
AI8
AI2
使 用 工 具 模 拟 输 入 ,差 分
下例显示了模拟传感器与差分输出的连接方式。将负输出端连接至 GND (0V),即可像非差分
传感器一样工作。
POWER
AI8
GND
AI2
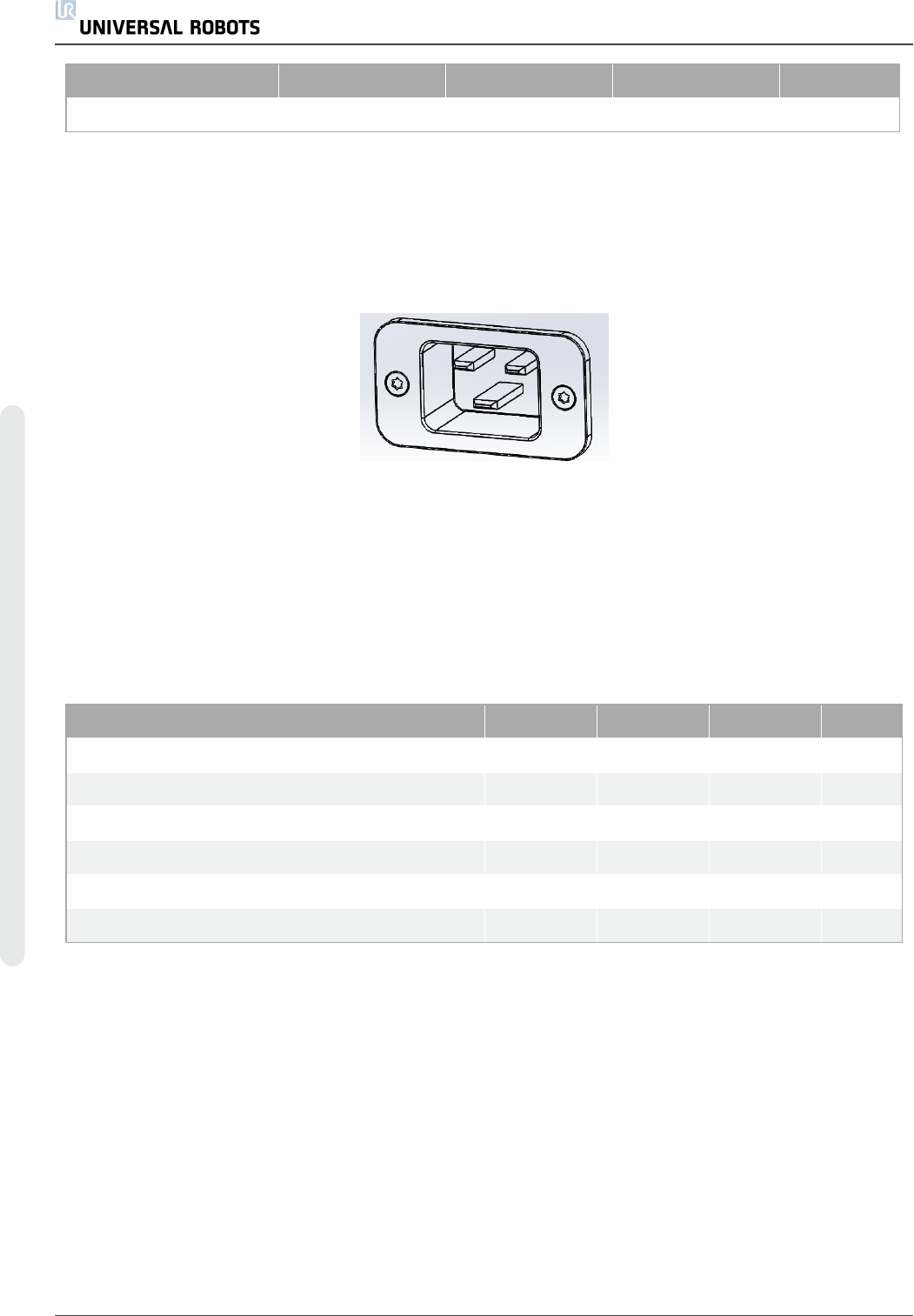
1.9.5. 以太网
控制箱底部提供有以太网接口,请参见下图。
以太网接口可用于以下应用:
• MODBUS I/O 扩展模块。请参阅第 II 部分PolyScope 手册 在本页79了解更多信息。
• 远程访问和控制。
电气规范如下所示。
用 户 手 册 41 UR5
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
参数 最小值 典型值 最大值 单位
通信速度 10 - 1000 Mb/s
1.9.6. 电源连接
控制箱市电电缆末端有一个标准 IEC 插头。将当地专用的市电插座或电缆连接到 IEC 插头。
要使机器人通电,控制箱必须与电源相连。这个过程必须使用相应的 IEC C19 电线连接控制
箱底部的标准 IEC C20 插头来完成,请参见下图。
电源至少应配备以下附件:
• 接地。
• 市电保险丝。
• 剩余电流断路器。
建议对机器人应用中的所有设备的电源安装电源开关,以便于在维修时上锁挂牌。
电气规范如下表所示。
参数 最小值 典型值 最大值 单位
输入电压 100 - 265 VAC
外部市电保险丝( 100-200V 时) 8 - 16 A
外部市电保险丝 (@ 200-265V) 8 - 16 A
输入频率 47 - 63 Hz
备用电源 - - 0.5 W
额定工作功率 90 150 325 W
UR5 42 用 户 手 册
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
警告
1. 请确保机器人以正确的方式接地( 电气接地) 。请使用未用的且与控制箱
内接地标志相连的插销来为系统内的所有设备建立通用接地。接地连接
器应至少有该系统内最高电流的额定电流。
2. 请确保控制箱的输入电流受到剩余电流装置 (RCD) 和适当的保险丝的保
护.
3. 完成所有服务所需的机器人安装设置后,所有的电源都需上锁挂牌。当
系统上锁后,其他设备都不可给机器人 I/O 供电。
4. 请确保所有的电缆在控制箱通电前都正确连接。始终正确使用原装的电
源线。
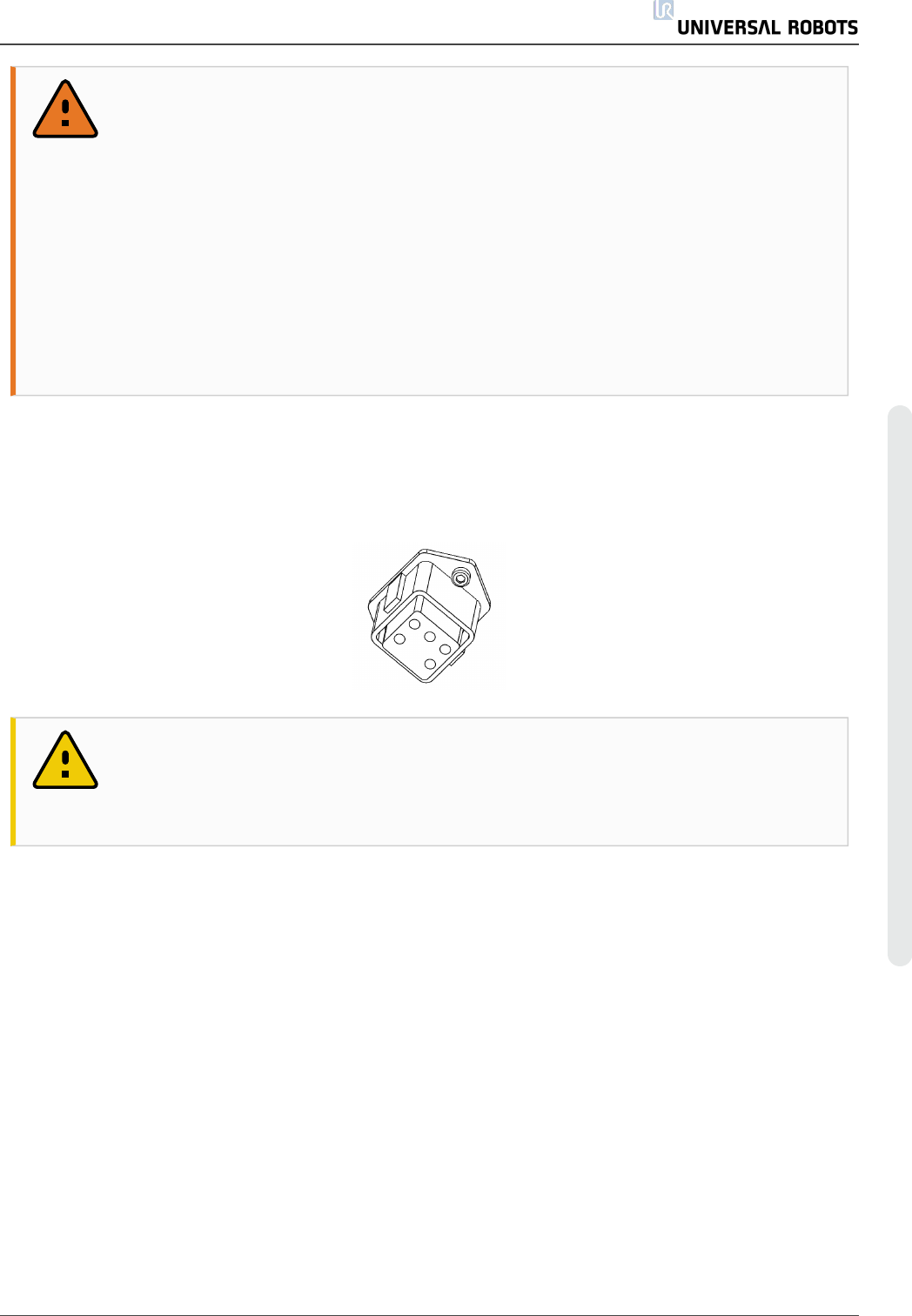
1.9.7. 机器人连接
机器人电缆必须插入控制箱底部的连接器中,请参见下图。在开启机器人手臂时,务必适当锁
定连接器。断开机器人电缆时必须切断机器人的电源。
小心
1. 切勿在机器人手臂开启时断开机器人电缆。
2. 切勿延长或改装原电缆。
用 户 手 册 43 UR5
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。