99312_UR5_User_Manual_zh_E67ON_Global.pdf - 第92页
安 全 设 置 包 含 许 多 用 于 限 制 机 器 人 手 臂 的 活 动 的 限 制 值 , 还 包 含 许 多 可 配 置 输 入 和 输 出 的 安 全 功 能 设 置 。 它 们 的 定 义 在 安 全 屏 幕 的 下 列 子 选 项 卡 中 : • Ge ner al L imi ts 子 选 项 卡 可 定 义 机 器 人 手 臂 的 力 、 功 率 、 速 度 和 动 量 。 当 机 器 人 手 臂 击 中 人 或 与…
1.21. 安全配置
1.21.1. 前言
机器人有一套高级安全系统。根据机器人工作空间的特殊特征,安全系统的设置必须在确保
机器人周边的所有人员和设备安全的情况下进行配置。应用风险评估定义的设置是集成商必
须做的第一件事。有关安全系统的详细信息,请参阅硬件安装手册。
警告
1. 安全相关功能和接口的使用和配置必须根据集成商针对特定机器人应用
执行的风险评估来完成,请参阅硬件安装手册。
2. 设置和示教的安全配置设置必须根据集成商执行的风险评估来应用,应
在机器人手臂第一次通电之前进行。
3. 所有可以在屏幕及其子选项卡上访问的安全配置设置都必须根据集成商
执行的风险评估进行。
4. 集成商必须确保所有对安全配置设置的更改都符合集成商自己的风险评
估。
5. 集成商必须防止未授权人员更改安全配置,比如安装密码保护。
按“为机器人编程”按钮,选择“安装设置”选项卡并点按“安全”,可以从“欢迎”屏幕( 请参阅第 111
页上的“1.21.5. ‘欢迎’屏幕”) 下访问“安全配置”屏幕。安全配置有密码保护,请参阅1.21.8. 密码
锁 在本页85。
用 户 手 册 81 UR5
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
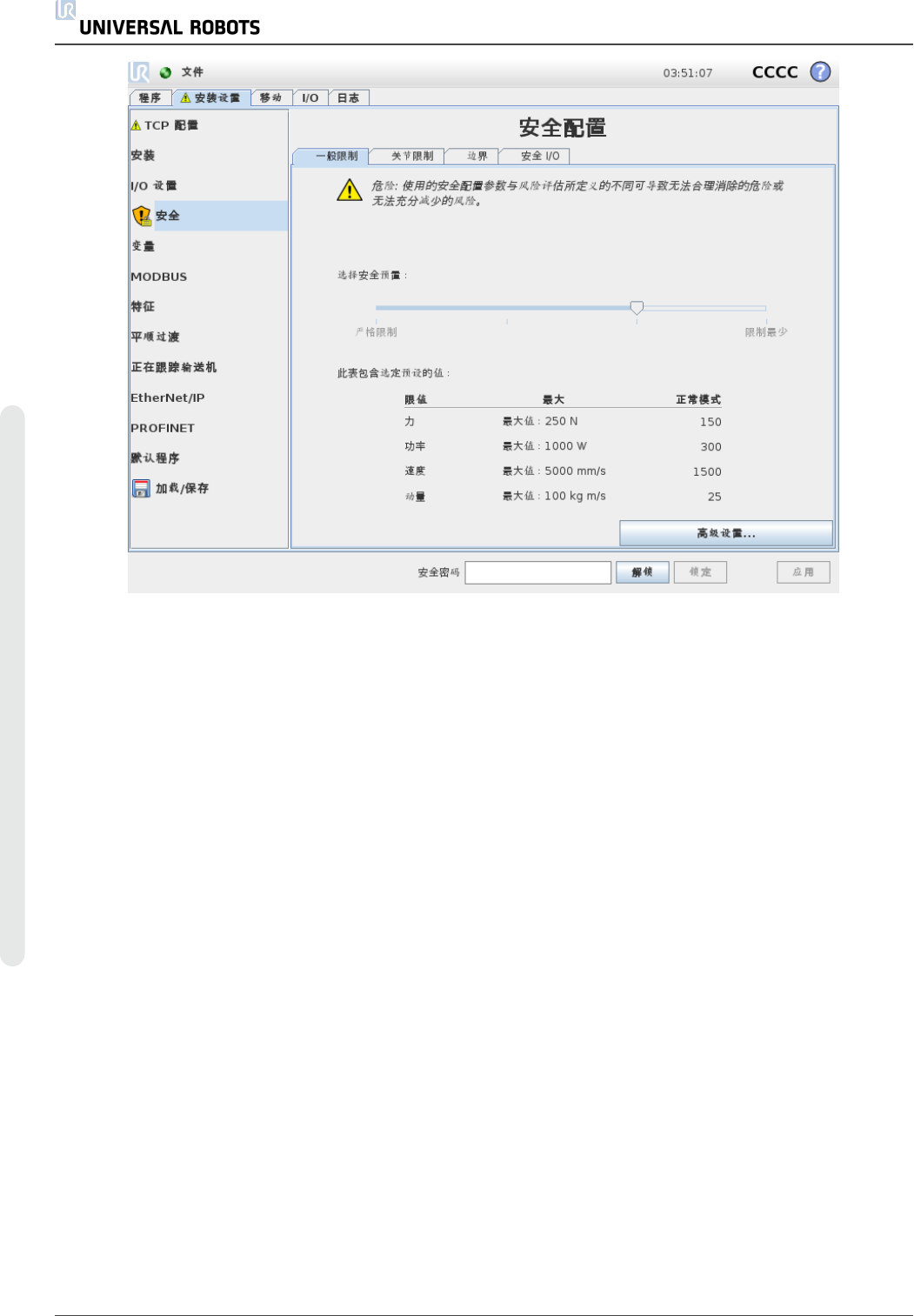
安全设置包含许多用于限制机器人手臂的活动的限制值,还包含许多可配置输入和输出的安
全功能设置。它们的定义在安全屏幕的下列子选项卡中:
• General Limits子选项卡可定义机器人手臂的
力
、
功率
、
速度
和
动量
。当机器人手臂
击中人或与环境的某一部分互撞的风险非常高时,这些设置需设置为低值。如果风险较
低,更高的一般限制可使机器人活动得更快,对环境施加更大的力。有关更多详细信
息,请参阅1.21.10. 一般限制 在本页86。
• Joint Limits子选项卡由
关节速度
和
关节位置
限值组成。
关节速度
限值定义每个关节
的最大角速度,并会进一步限制机器人手臂的速度。
关节位置
限值定义每个关节允许的
位置范围( 在关节空间中) 。有关更多详细信息,请参阅1.21.11. 关节限制 在本页88。
• Boundaries子选项卡可定义机器人 TCP 的安全平面( 在笛卡尔空间中) 和工具方向边
界。安全平面既可以配置为机器人 TCP 位置的硬限制,也可以配置为用于激活
缩减
模式
安全限制( 请参阅1.21.12. 边界 在本页89.1.21.6. 安全模式 在本页84) 的触发器。工具方
向边界为机器人 TCP 的方向设定了一个硬限制。有关更多详细信息,请参阅
• Safety I/O子选项卡可定义可配置输入和输出的安全功能( 请参阅1.24.2. I/O 选项卡 在
本页113) 。例如,可将
紧急停止
配置为输入。有关更多详细信息,请参阅1.21.13. 安全 I/O
在本页95。
1.21.2. 更改安全配置
安全配置设置只能根据集成商执行的风险评估来更改。
建议的安全配置更改程序如下:
UR5 82 用 户 手 册
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
1. 确保更改符合集成商执行的风险评估。
2. 将安全设置调整到集成商执行的风险评估所定义的适当水平。
3. 确认安全设置已应用。
4. 将下面这段话记录在操作员手册中:在靠近机器人作业前,确保安全配置符合预期。这
可以通过检查 PolyScope 右上角的校验和等方式来进行验证( 请参阅PolyScope 手册中
的1.21.5. 安全校验和 下一页) 。
1.21.3. 安全同步和错误
与 GUI 已经加载的机器人安装设置相比,所应用的安全配置的状态由屏幕左侧Safety文本旁
边的盾形图标表示。这些图标便于快速指示当前状态。图标的定义如下:
配置已同步
表明 GUI 安装与当前应用的安全配置一致。没有进行过任何更改。
配置已更改
表明 GUI 安装与当前应用的安全配置不同。
在编辑安全配置时,盾形图标将指示您是否应用了当前设置。
如果Safety选项卡中有任何文本字段包含无效输入,安全配置将处于错误状态。指示错误状
态的方式很多:
1. 屏幕左侧的Safety文本旁边会显示一个红色错误图标。
2. 包含有错误的子选项卡的顶部标有红色错误图标。
3. 包含有错误的文本字段标记为红色背景。
如果在有错误的情况下尝试退出Installation选项卡,则会显示一个包含以下选项的对话
框:
1. 解决问题,消除所有错误。当屏幕左侧的Safety文本旁边不再显示红色错误图标时,可
以看到此选项。
2. 恢复上次应用的安全配置。选择此选项将放弃所有更改,继续进行所需的操作。
如果在没有错误的情况下退出该选项卡,将显示提供有以下选项的不同对话框:
1. 应用更改并重启系统。选择此选项将对系统应用安全配置更改并重启。注意:这并不表
示所有更改都已保存;此时关闭机器人将丢失包括安全配置在内的机器人安装的所有更
改。
2. 恢复上次应用的安全配置。选择此选项将放弃所有更改,继续进行所需的操作。
1.21.4. 公差
机器人手臂
使用可以防止安全违例的内置公差。安全公差是安全限制和最大操作值之间的差
异。例如,通用速度公差为 − 150
mm
/
s
。这意味着,如果用户配置的速度限值为 250
mm
/
s
,则最
大运行速度将为 250 − 150 = 100
mm
/
s
。安全公差防止安全违例,同时允许程序行为的波动。例
如,在处理很重的有效载荷时,可能存在
机器人手臂
需要以高于正常最大运行速度的速度短
暂运行以遵循编程轨迹的情况。图 12.1 中显示了这种情况的一个示例。
用 户 手 册 83 UR5
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。