99312_UR5_User_Manual_zh_E67ON_Global.pdf - 第109页
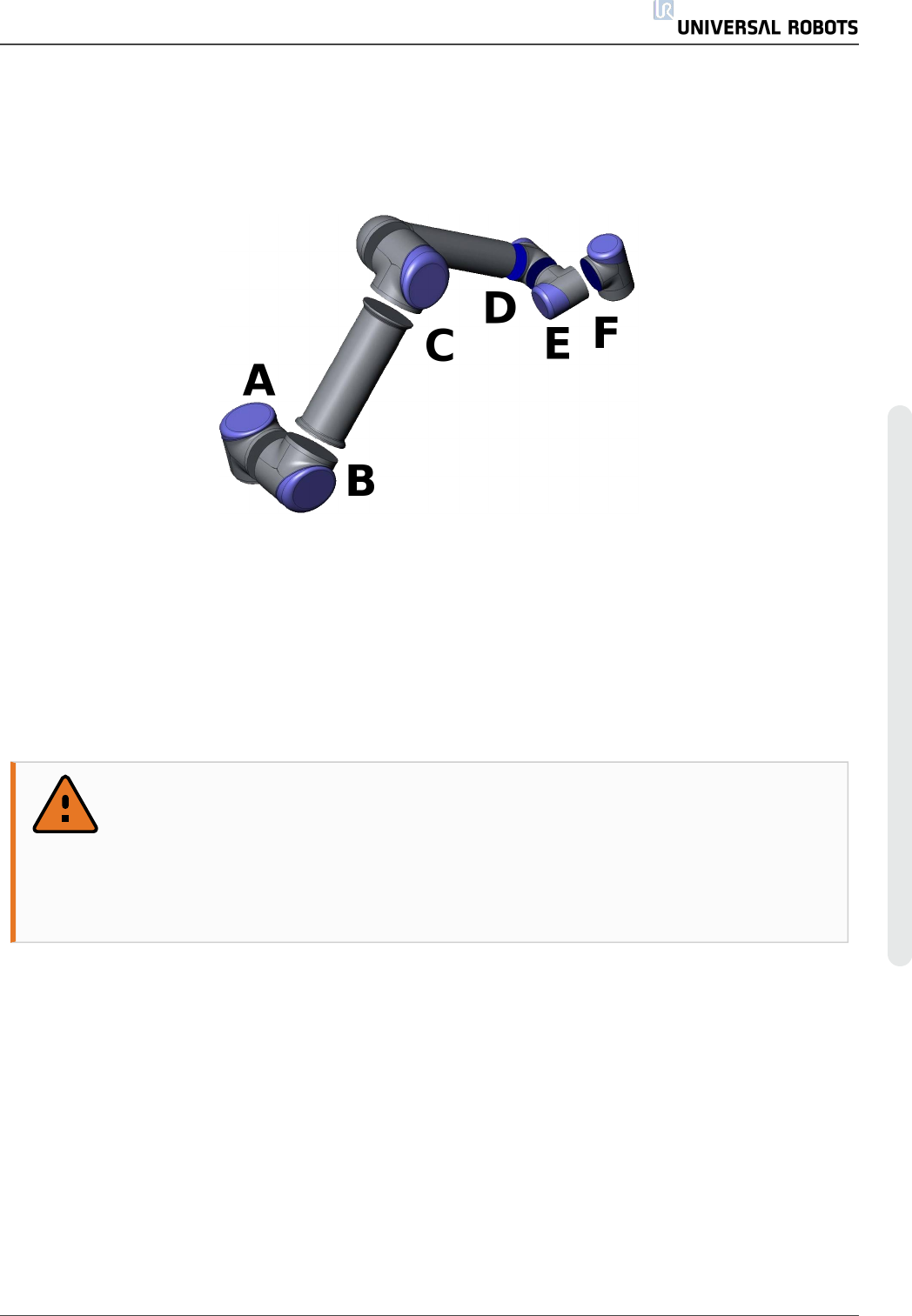
1.22. 开 始 编 程 1.2 2.1. 前 言 13. 1 : 机 器 人 关 节 A : 机 座 , B : 肩 部 , C : 肘 部 , D 、 E 、 F : 手 腕 1 、 2 、 3 U R 机 器 人 手 臂 由 挤 压 铝 管 和 关 节 组 成 。 这 些 关 节 及 其 常 用 名 称 如 图 13.1 所 示 。 机 座 是 机 器 人 的 安 装 位 置 , 机 器 人 的 另 一 端 ( 手 腕 3 ) …
1. 停机类别符合 ISO 13849-1,请参见术语表了解更多详细信息。↩
UR5 98 用 户 手 册
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
1.22. 开始编程
1.22.1. 前言
13.1:
机器人关节A:机座,B:肩部,C:肘部,D、E、F:手腕 1、2、3
UR 机器人手臂由挤压铝管和关节组成。这些关节及其常用名称如图 13.1 所示。机座是机器人
的安装位置,机器人的另一端( 手腕 3) 与机器人的工具相连。通过协调每一个关节的活动,除
了基座正上方及正下方的区域以外,机器人可以自由地移动工具。
PolyScope 是一个图形用户界面 (GUI),可用于操作机器人手臂和控制箱,执行机器人程序,以
及轻松创建新程序。
下一节介绍机器人入门知识。之后将对屏幕及 PolyScope 的功能做更加详尽的介绍。
警告
1. 硬件安装手册包含重要的安全信息,在机器人第一次通电前,UR 机器人
的集成商必须阅读并理解这些信息。
2. 在机器人手臂第一次通电前,集成商必须设置风险评估定义的安全配置
参数,请参阅1.21. 安全配置 在本页81一章。
1.22.2. 使用入门
使用 PolyScope 之前,必须先安装机器人手臂和控制箱,将控制箱接通电源。
安 装 机 器 人 手 臂 和 控 制 箱
请按照以下步骤安装机器人手臂和控制箱:
1. 开箱取出机器人手臂和控制箱。
2. 将机器人安装在一 个坚固的表面,该表面应当足以承受至少 10 倍的机座关节的完全扭
转力,以及至少 5 倍的机器人手臂的重量。该表面必须是防震的。
用 户 手 册 99 UR5
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
3. 将控制箱放置在其支脚上。
4. 将机器人和控制箱之间的机器人电缆插上电源。
5. 插上电源控制箱插头。
警告
倾翻的危险如果机器人没有安全地放置在坚固的表面上,机器人有可能会倾倒
并造成伤害。
有关详细安装说明,请参阅硬件安装手册。请注意,在使用机器人手臂进行任何工作之前,都
须进行风险评估。
开 /关 控 制 箱
按带触摸屏的控制板前侧的电源按钮即可打开控制箱。此面板通常被称为
示教盒
。接通控制
箱后,来自隐藏的操作系统的文本就会出现在触摸屏上。约一分钟后,屏幕上将显示一些按
钮,并弹出一个窗口,引导用户转至初始化屏幕( 请参阅1.22.6. 初始化屏幕 在本页104) 。
要关闭控制箱,请按屏幕上的绿色电源按钮,或使用欢迎屏幕上的关闭按钮( 请参阅1.22.5. 欢
迎屏幕 在本页103) 。
警告
直接从壁式插座上拔下电源线来关闭系统可能导致机器人文件系统损坏,从而
可能致使机器人功能出现故障。
开 /关 机 器 人 手 臂
如果控制箱已打开且所有紧急停止按钮都未激活,即可开启机器人手臂。机器人手臂的开启
方法如下:在初始化屏幕中( 请参阅1.22.6. 初始化屏幕 在本页104) ,触摸该屏幕上的开按钮,
然后按启动。当启动机器人后,制动器被解锁,机器人发出噪音并移动少许位置。
触摸初始化屏幕上的关按钮可关闭机器人手臂的电源。关闭控制箱也可自动关闭机器人手臂
的电源。
1.22.3. 第一个程序
程序是一个告诉机器人该做什么的命令列表。借助 PolyScope,即使是编程经验很少的人也可
以对机器人进行编程。对于大多数任务,整个编程过程使用触摸屏即可完成,无需键入任何晦
涩难懂的命令。
工具运动是机器人程序的一部分,教导机器手臂如何移动。在 PolyScope 中,工具运动使用一
系列路点进行设置。合并的路点构成了机器手臂遵循的路径。使用移动选项卡设置路点,手动
移动( 示教) 机器人至某个具体位置,或由软件计算得出。使用“移动”选项卡( 请参阅1.24. 机器
人控制 在本页111) 将机器人手臂移动到所需位置,或通过在按住示教盒后面的“自由驱动”按
钮时将机器人手臂拉到位来示教位置。
UR5 100 用 户 手 册
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。