99312_UR5_User_Manual_zh_E67ON_Global.pdf - 第220页
自 由 模 塑 用 于 向 IMM 发 送 信 号 , 告 之 其 可 以 开 始 执 行 模 塑 操 作 。 此 信 号 激 活 时 , 机 器 人 必 须 位 于 IMM 外 部 。 使 用 复 选 框 可 启 用 / 禁 用 各 个 步 骤 。 小 心 信 号 激 活 时 , 机 器 人 应 在 模 塑 外 , 这 样 模 塑 关 闭 时 不 会 触 碰 机 器 人 。 U R5 2 10 用 户 手 册 EU ROMAP 6 7…
将程序结构插入机器人程序后,可以通过在程序中选择结构,然后点击
命令
选项卡对结构进
行自定义。所有程序结构都由若干步骤组成。大多数步骤默认处于启用状态,一些步骤可能因
对结构必不可少而无法禁用。如果测试条件未得到满足,则
测试
步骤会使程序停止。输入和输
出的状态均可测试。
设置输出
步骤可将指定的输出设置为高电平或低电平。
等待至
步骤通常
用于指示等到某个移动完成后再继续执行后续步骤和后续程序节点。
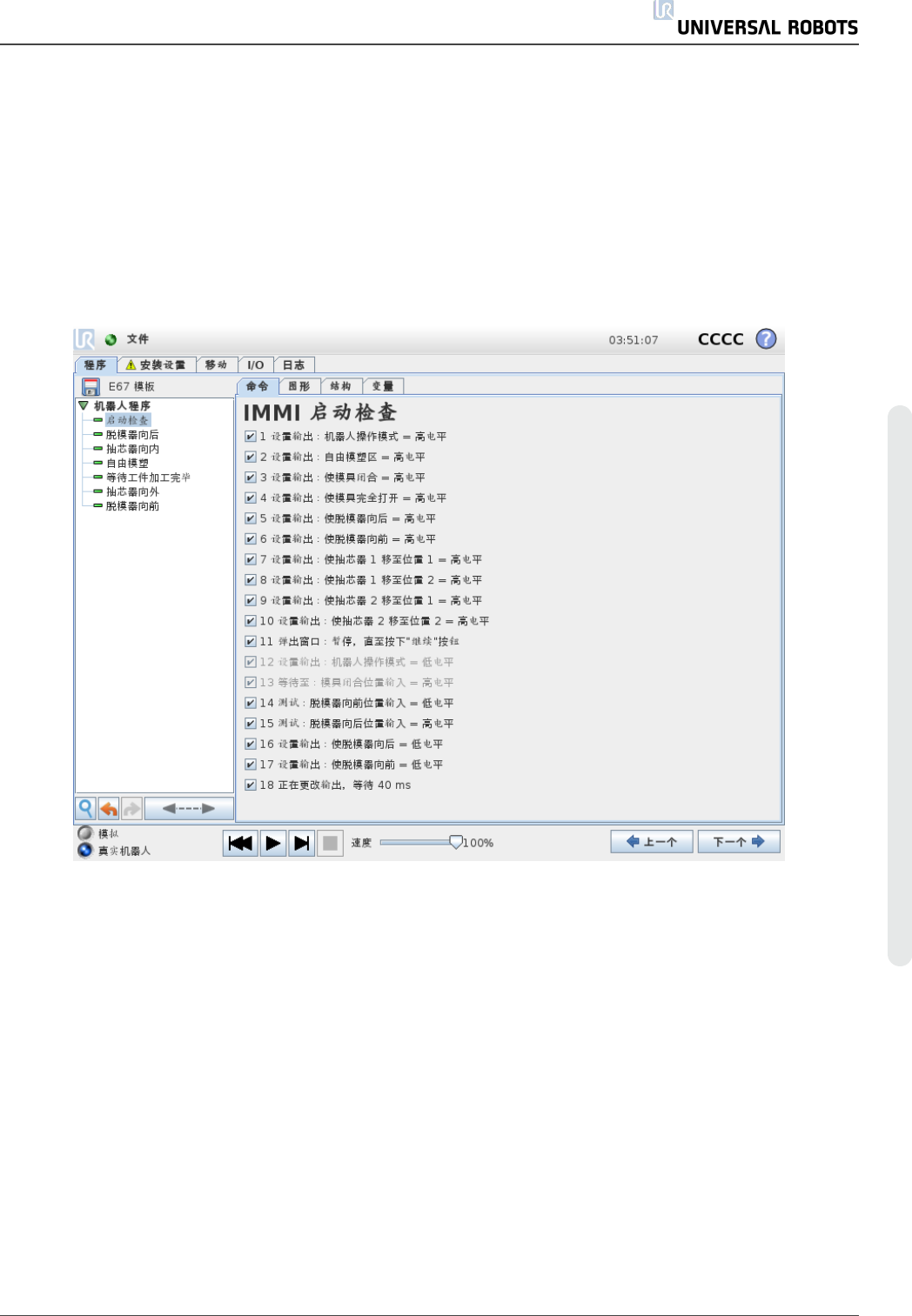
启 动 检 查
机器人程序开始处使用一次,以在开始执行模塑之前确保机器人和机器设置正确。使用复选
框可启用/禁用各个步骤。
用 户 手 册 209 UR5
EUROMAP 67 Interface
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
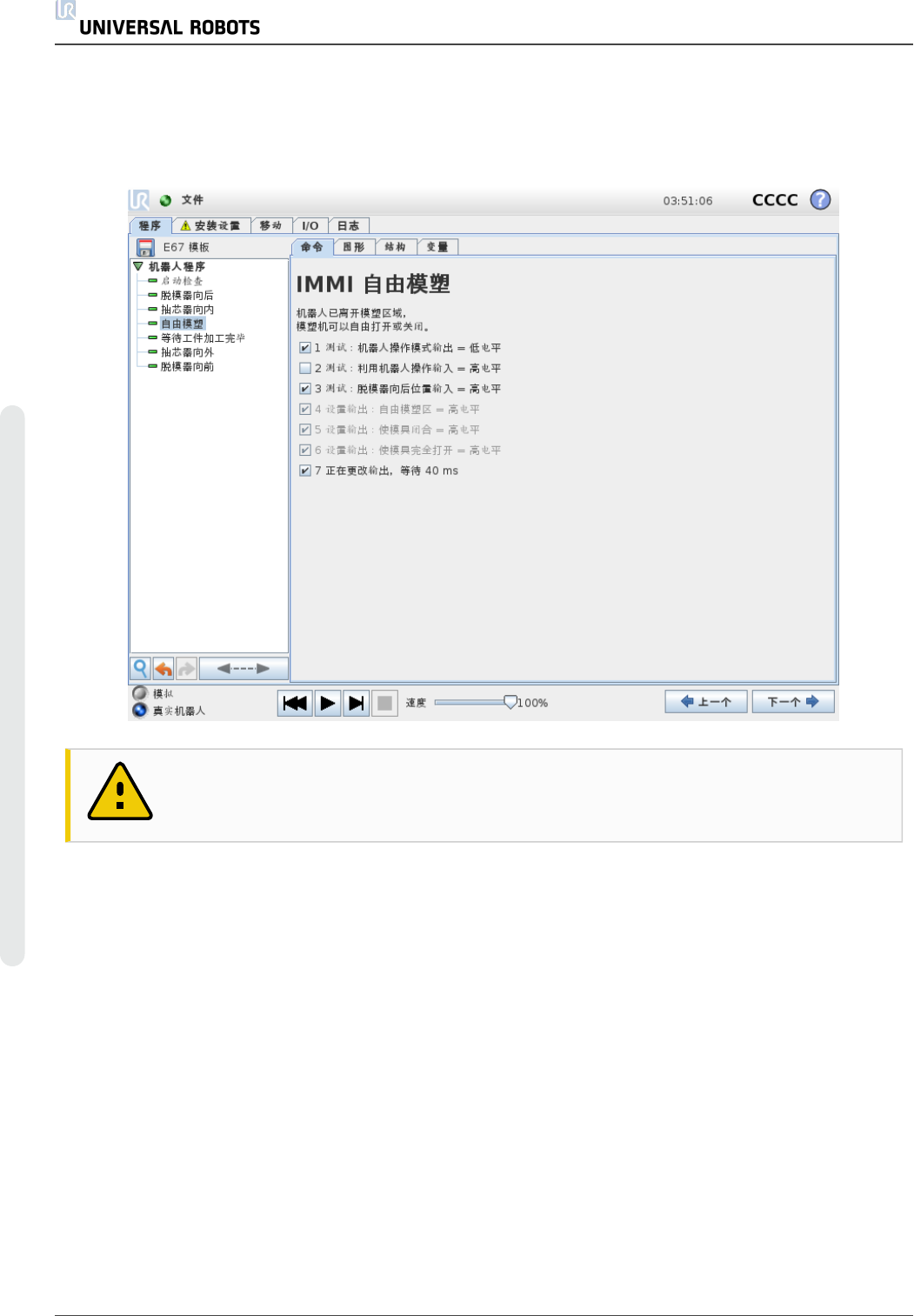
自 由 模 塑
用于向 IMM 发送信号,告之其可以开始执行模塑操作。此信号激活时,机器人必须位于 IMM
外部。使用复选框可启用/禁用各个步骤。
小心
信号激活时,机器人应在模塑外,这样模塑关闭时不会触碰机器人。
UR5 210 用 户 手 册
EUROMAP 67 Interface
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
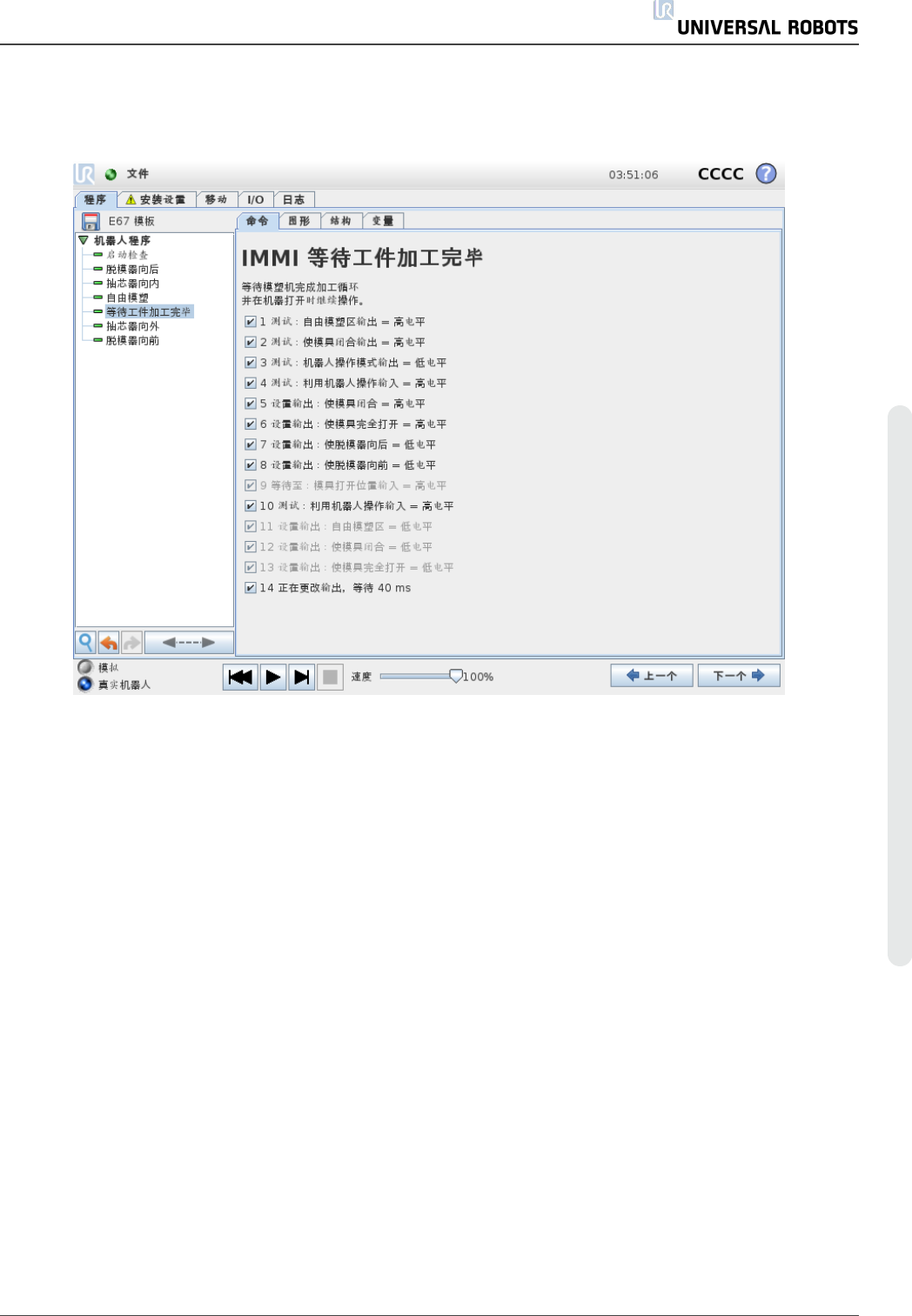
等 待 工 件 加 工 完 毕
用于让机器人等待 IMM 中的工件注塑就绪。使用复选框可启用/禁用各个步骤。
用 户 手 册 211 UR5
EUROMAP 67 Interface
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。