99312_UR5_User_Manual_zh_E67ON_Global.pdf - 第35页
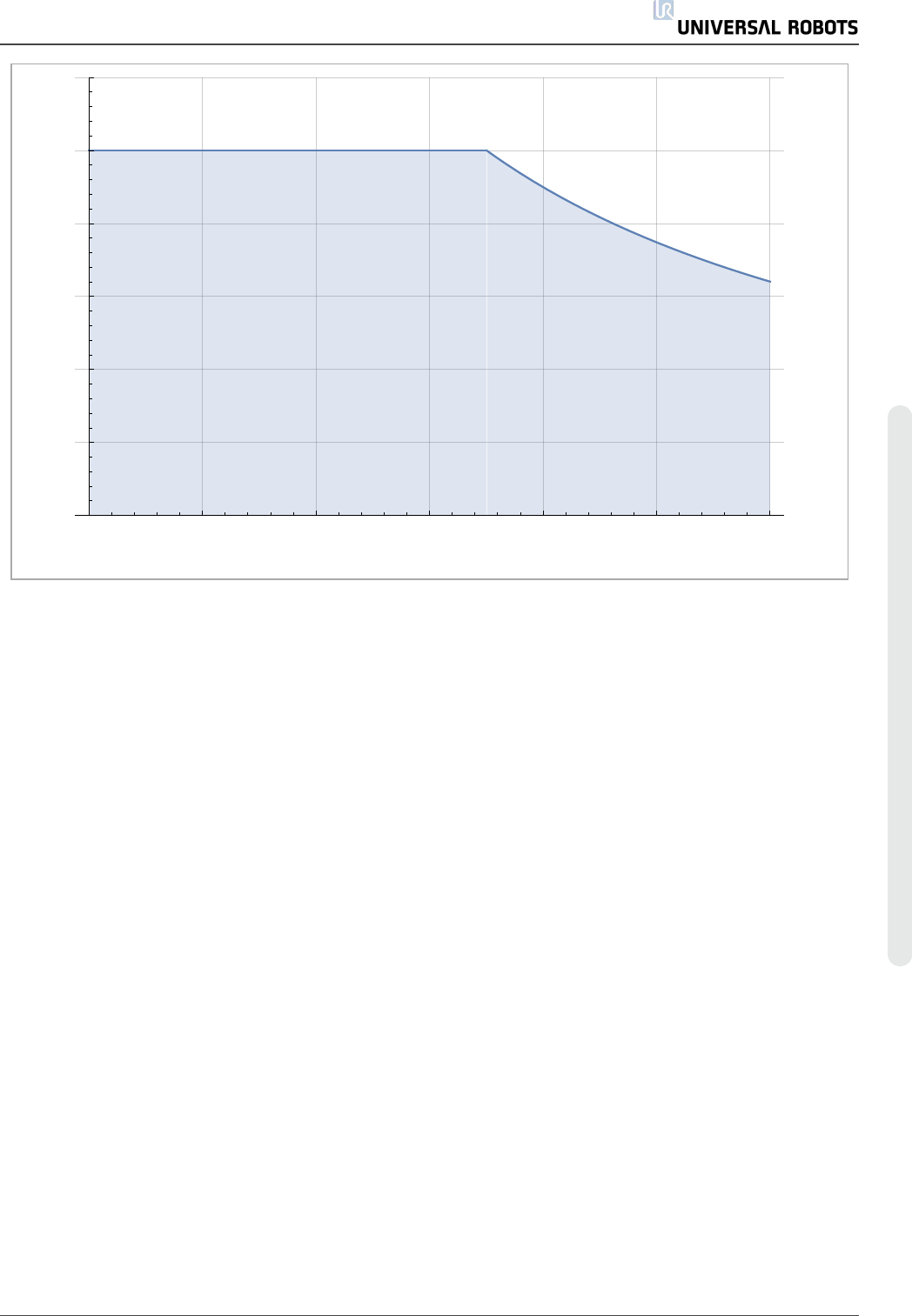
0 100 200 300 400 500 600 1 2 3 4 5 6 重 心 偏 移 [mm ] 6.3 : 最 大 允 许 有 效 载 荷 与 重 心 偏 移 之 间 的 关 系 。 用 户 手 册 2 5 U R5 版 权 所 有 © 2 009–2021U ni ver s al R obots A/S 。 保 留 所 有 权 利 。
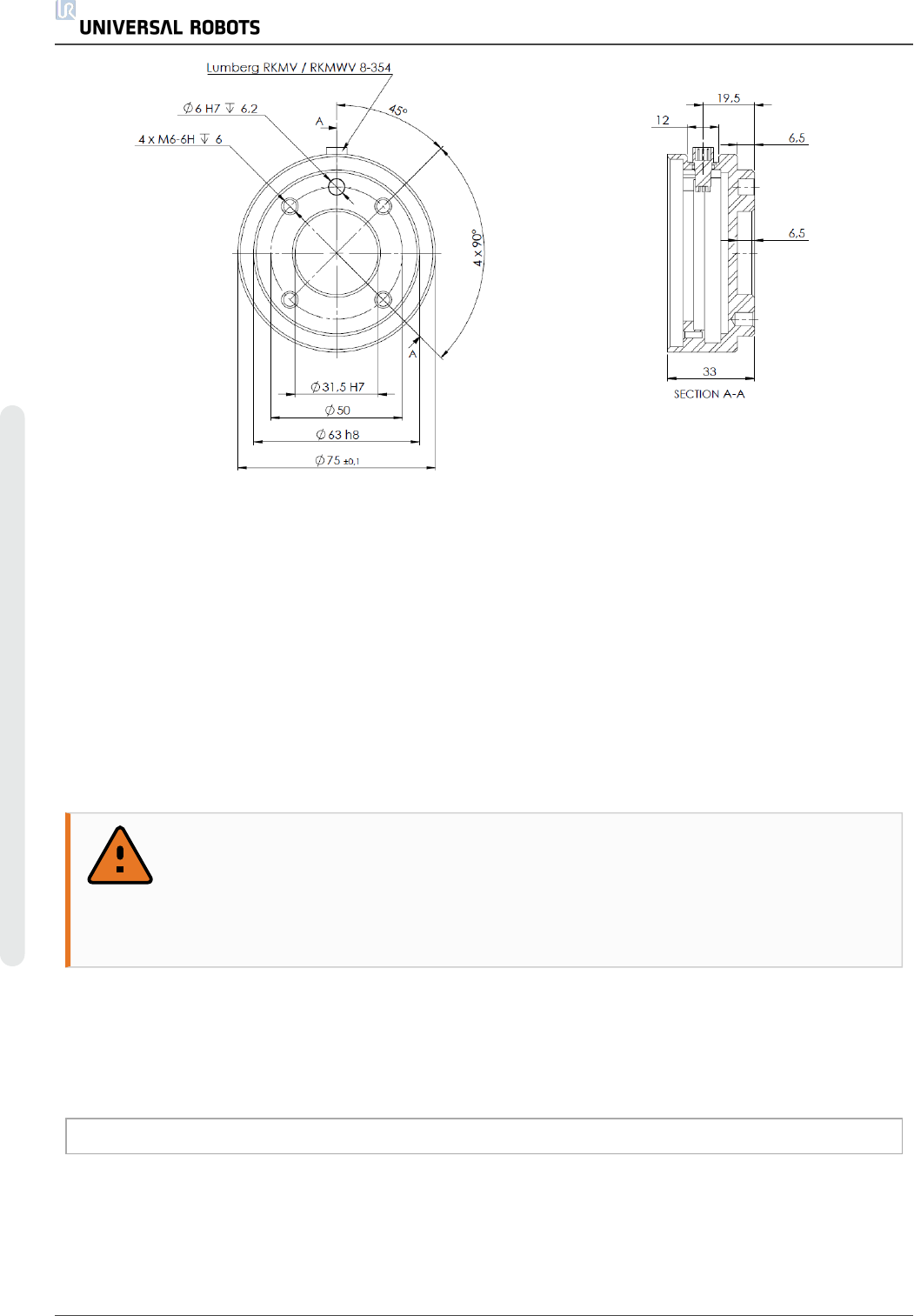
6.2:
工具输出法兰( 符合 ISO 9409-1-50-4-M6 标准) 。此处显示的是机器人顶端的工具安装
位置。所有测量值均以 mm 为单位。
控 制 箱
控制箱可悬挂在墙壁上,也可安放在地面上。控制箱每侧应留出 50 mm 的空隙,以确保空气流
通顺畅。额外安装支架可购买。
示 教 盒
示教盒可以悬挂在墙壁或控制箱上。示教盒的额外安装支架可购买。确保大家不会踩到电缆。
警告
1. 确保控制箱、示教盒和电缆不接触液体。潮湿的控制箱可导致死亡。
2. 控制箱和示教盒不得暴露在灰尘或超出 IP20 等级的潮湿环境下。密切注
意存在传导性灰尘的环境。
1.8.4. 最大有效载荷
机器人手臂的最大允许有效载荷取决于重心偏移,请参见图 6.3。重心偏移定义为工具输出法
兰的中心与重心之间的距离。
Payload [kg]
UR5 24 用 户 手 册
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
0 100 200 300 400 500 600
1
2
3
4
5
6
重心偏移 [mm]
6.3:
最大允许有效载荷与重心偏移之间的关系。
用 户 手 册 25 UR5
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
UR5 26 用 户 手 册
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。