99312_UR5_User_Manual_zh_E67ON_Global.pdf - 第121页
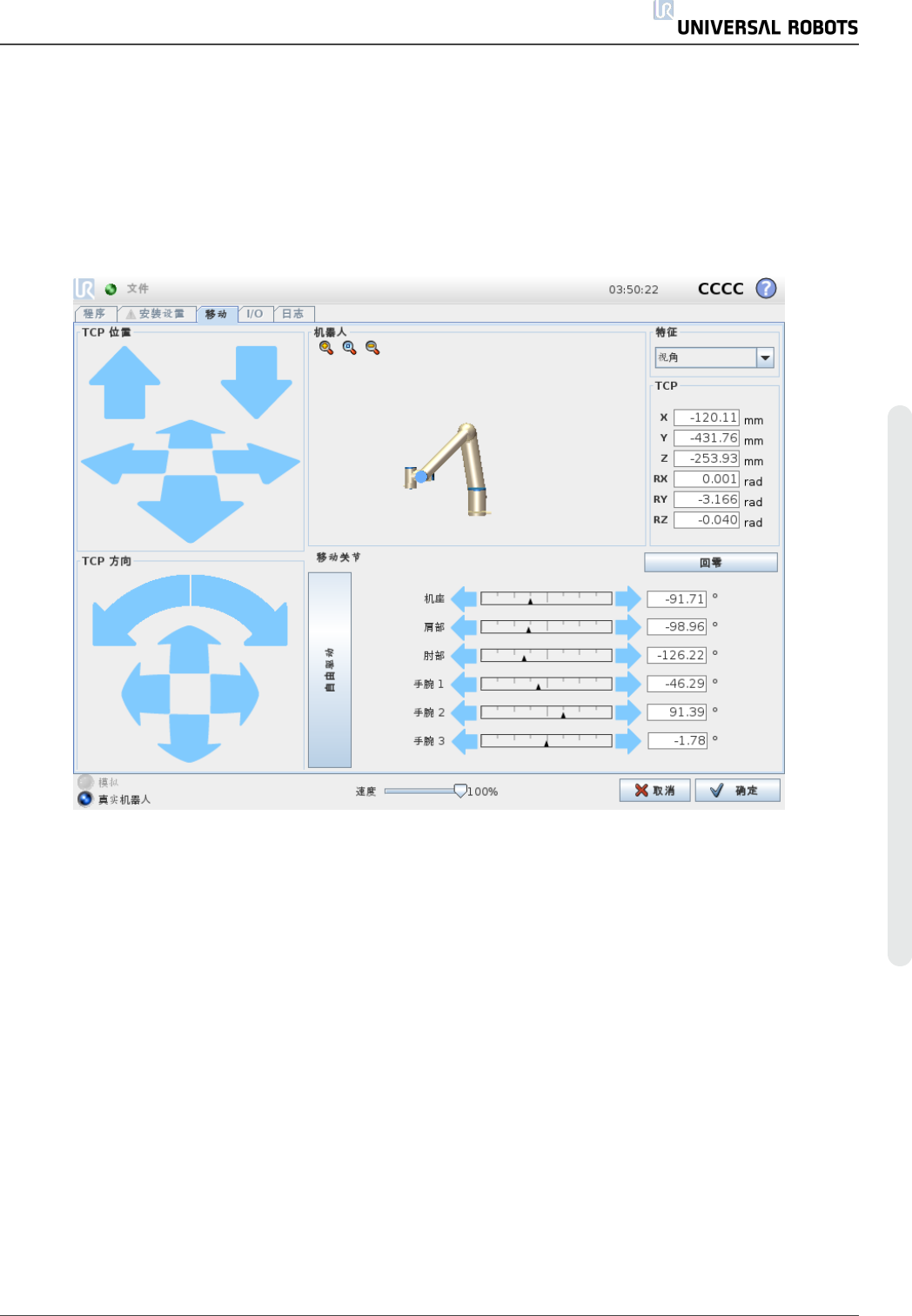
1.24. 机 器 人 控 制 1.2 4.1. 移 动 选 项 卡 在 此 屏 幕 , 始 终 可 通 过 平 移 / 旋 转 机 器 人 工 具 或 逐 个 移 动 机 器 人 关 节 来 直 接 移 动 ( 缓 慢 移 动 ) 机 器 人 手 臂 。 机 器 人 以 3D 视 角 形 式 显 示 机 器 人 手 臂 的 当 前 位 置 。 按 放 大 镜 图 标 可 缩 放 视 角 , 拖 动 手 指 图 标 可 更 改 视 角 …
UR5 110 用 户 手 册
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
1.24. 机器人控制
1.24.1. 移动选项卡
在此屏幕,始终可通过平移/旋转机器人工具或逐个移动机器人关节来直接移动( 缓慢移动) 机
器人手臂。
机 器 人
以 3D 视角形式显示机器人手臂的当前位置。按放大镜图标可缩放视角,拖动手指图标可更改
视角。要获得控制机器人手臂的最佳感觉,请选择视角特征并旋转 3D 图的查看角度,以符合
您查看真实机器人手臂的视角。
如果机器人 TCP 的当前位置距离安全平面或触发平面很近,或者机器人工具的方向接近工具
方向边界限值( 请参阅1.21.12. 边界 在本页89) ,则会显示相邻边界限值的 3D 表示。请注意,
如果机器人在运行程序,边界限制可视化将被禁用。
安全板以黄黑色呈现,带小箭头指示安全板正常,显示安全板上允许放置机器人 TCP 的位
置。触发平面以蓝色和绿色显示,并带有一个指向平面一侧的小箭头,在这一侧,正常模式限
值( 请参阅1.21.6. 安全模式 在本页84) 处于激活状态。工具方向边界限值以锥体呈现,带有一
个指示机器人工具当前方向的矢量。锥体内侧代表工具方向的允许区域( 矢量) 。
机器人 TCP 离开极限区域时,3D 成像消失。如果 TCP 侵犯边界限值或接近边界限值,则成像
会变成红色。
用 户 手 册 111 UR5
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
特 征 和 工 具 位 置
在屏幕右上角可找到特征选择器。它定义了用于控制机器人手臂相对应的特征。
当前激活的工具中心点 ( TCP) 的名称显示在特征选择器下方。文本框显示了 TCP 相对于所
选特征的完整坐标值。有关配置多个指定 TCP 的更多信息,请参阅1.24.6. 安装设置 → TCP 配
置 在本页117。
单击坐标或关节位置可手动编辑坐标值。这将转至“位姿编辑器”屏幕( 请参阅1.23.2. 位姿编辑
器屏幕 在本页107) ,您可以在该屏幕上为工具指定目标位置和方向或者目标关节位置。
移 动 工 具
• 按住平移箭头( 顶部) 将按所指示的方向移动机器人的工具头。
• 按住旋转箭头( 底部) 将按所指示的方向更改机器人工具的方向。旋转点为工具中心点
(TCP),即位于机器人手臂末端,提供机器人工具特征点的点。TCP,在图中以蓝色小球
表示。
注意:可随时释放该按钮,使机器人停止运动
移 动 关 节
允许直接控制各关节。每个关节可以在 − 360
∘
到 + 360
∘
之间移动,这是每个关节的水平条所
示的默认
关节限值
。如果关节达到其关节极限角,则无法再移离一步。如果一个关节的位置范
围配置与默认范围( 请参阅1.21.11. 关节限制 在本页88) 不同,此范围在水平条中将以红色显
示。
自 由 驱 动
按住
自由驱动
按钮时,可以用手抓住机器人手臂并将其拉至所需位置。如果设置选项卡中的
重力设置( 请参阅1.24.7. 安装设置 → 安装 在本页120) 不正确,或者机器人手臂承受重载荷,
则在按下自由驱动按钮时,机器人手臂可能开始移动( 下降) 。在这种情况下,只需再次释放自
由驱动按钮即可。
警告
1. 确保使用正确的安装设定( 例如:机器人安装角度、TCP 中的重量、TCP
偏移) 。与程序一起保存并加载安装设置文件。
2. 在按下自由驱动按钮之前,确保 TCP 设置和机器人安装设置都正确。如
果这些设置不正确,机器人手臂会在自由驱动按钮激活时移动。
3. 只有通过风险评估,才允许在安装设置中使用“自由驱动”功能( 阻抗/逆向
驱动) 。工具及障碍物不得有锐边或扭点。确保所有人员都在机器人手臂
工作范围之外。
UR5 112 用 户 手 册
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。