99312_UR5_User_Manual_zh_E67ON_Global.pdf - 第29页
1.7. 运 输 运 输 时 保 持 好 原 包 装 。 将 包 装 材 料 保 存 在 干 燥 处 ; 以 后 可 能 需 要 包 装 并 移 动 机 器 人 。 将 机 器 人 从 包 装 材 料 中 移 至 安 装 位 置 时 , 同 时 抬 升 机 器 人 手 臂 的 两 根 挤 压 铝 管 。 扶 住 机 器 人 直 至 机 器 人 机 座 的 所 有 安 装 螺 栓 全 部 紧 固 好 。 控 制 箱 应 使 用 手 柄 抬…
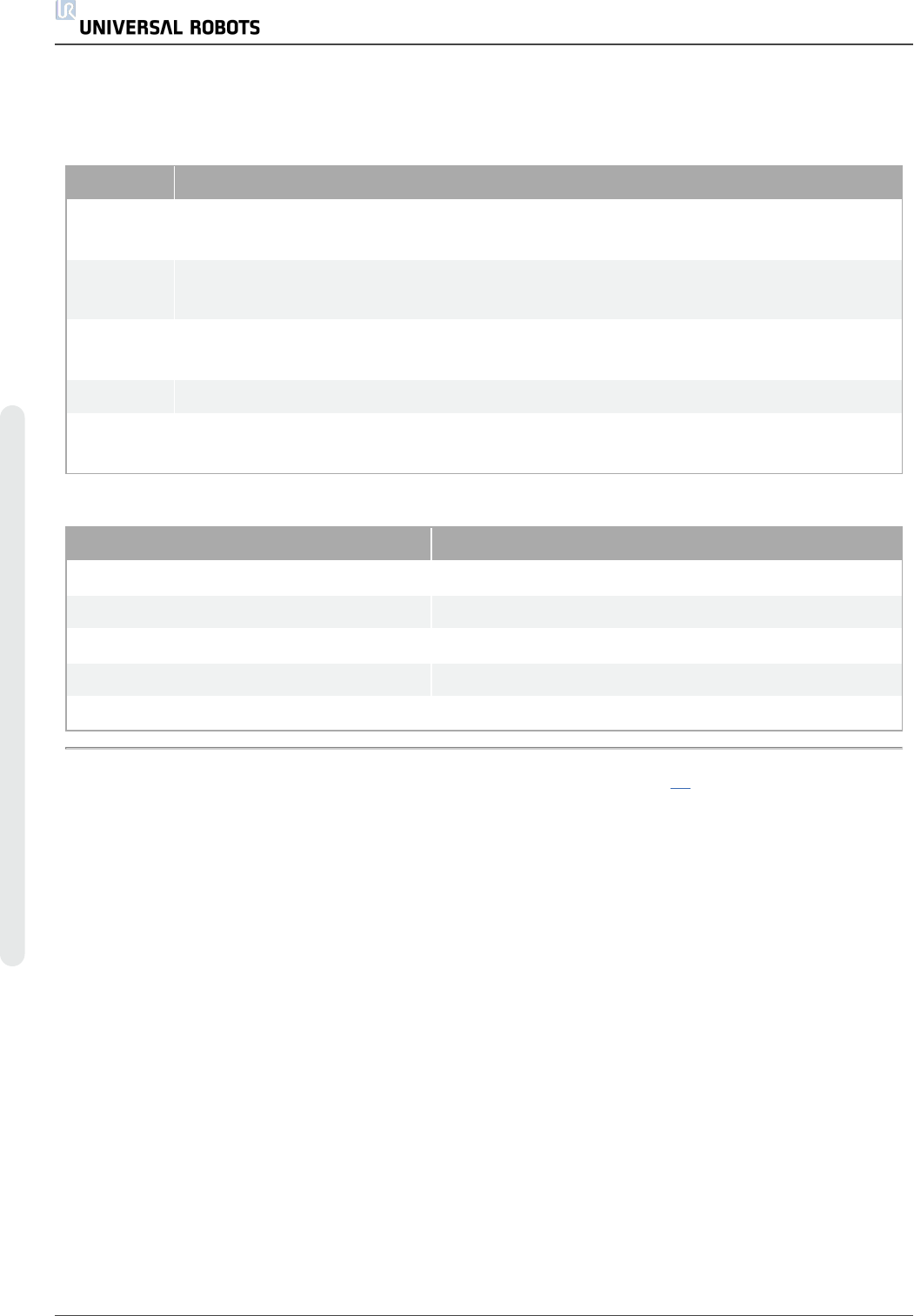
安 全 相 关 的 电 气 输 出
下表概述了安全相关的电气输出。
安全输出 描述
系统紧急
停止
当
机器人紧急停止
输入为逻辑低电平或按下紧急停止按钮时,为逻辑低电平。
机器人运
动
当此信号为逻辑高电平时,机器人手臂每个关节的移动都不会超过 0.1 rad。
机器人未
停止
当由于紧急停止或防护停止而使机器人停止或处于停止过程中时为逻辑高电
平。否则将为逻辑低电平。
缩减模式 Logic low when the safety system is in
Reduced
mode.
非缩减模
式
缩减模式
输出取反。
如果安全输出设置不当,安全系统将发出 0 类停机,其最坏情况下的反应时间为:
安全输出 最坏情况反应时间
系统紧急停止 1100ms
机器人运动 1100ms
机器人未停止 1100ms
缩减模式 1100ms
非缩减模式 1100ms
1. 停机类别符合 IEC 60204-1,请参见术语表了解更多详细信息。↩
UR5 18 用 户 手 册
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
UR5 20 用 户 手 册
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。