99312_UR5_User_Manual_zh_E67ON_Global.pdf - 第124页
1.2 4.3. M ODB US 下 面 的 截 屏 显 示 了 在 安 装 设 置 中 设 置 的 MO D BU S 客 户 端 I/O 信 号 。 如 果 设 置 的 数 量 不 止 一 个 , 使 用 页 面 顶 部 的 下 拉 菜 单 可 以 根 据 信 号 类 型 和 MO DB US 单 元 更 改 显 示 的 内 容 。 列 表 中 的 每 一 个 信 号 都 包 含 连 接 状 态 、 数 值 、 名 称 和 信 号…
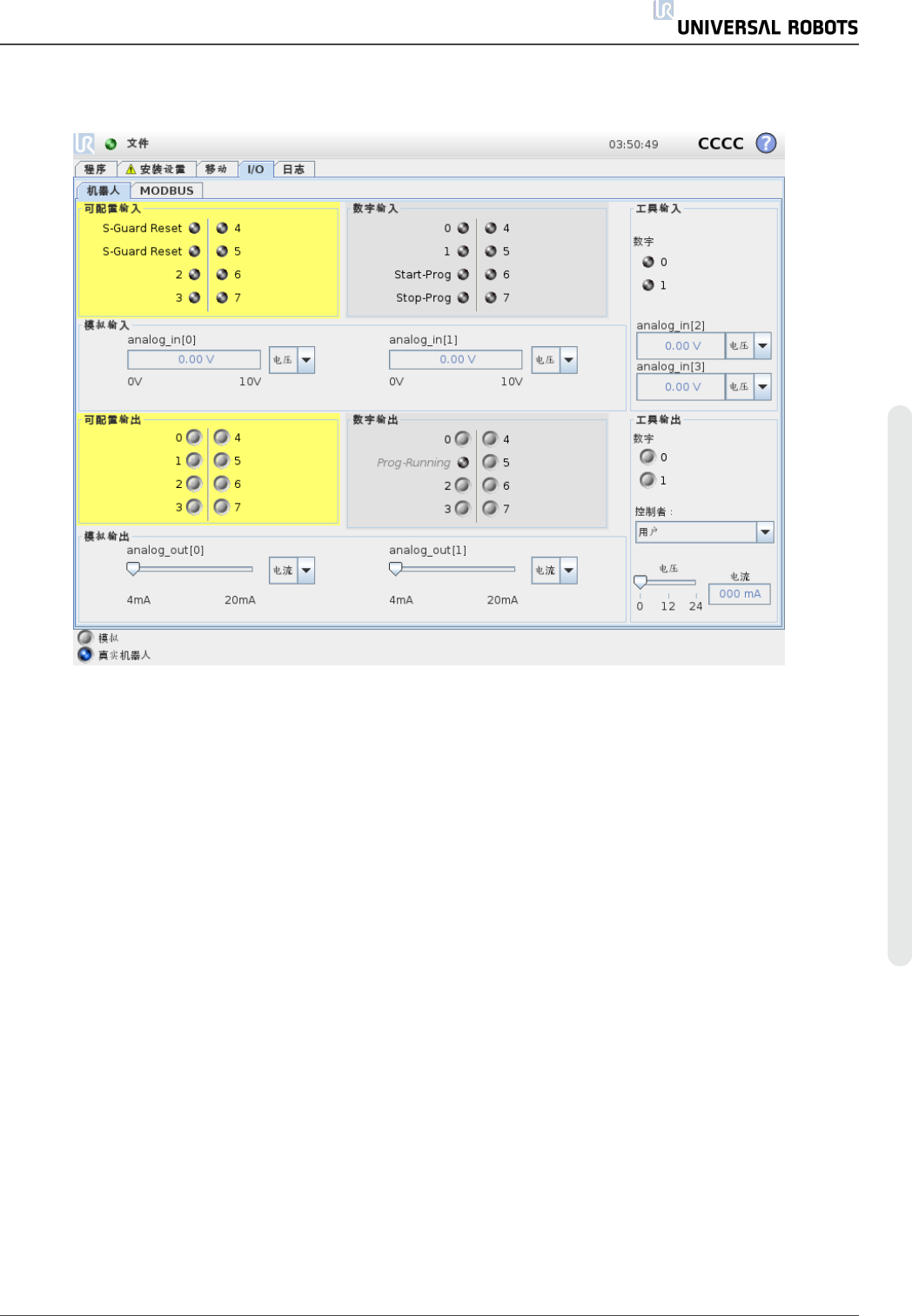
1.24.2. I/O 选项卡
在此屏幕上,您可以始终监控并设置机器人控制箱收发的实时 I/O 信号。屏幕将显示 I/O 的当
前状态,包括程序运行期间的 I/O 状态。程序运行期间如有任何更改,程序将停止运行。程序
停止运行时,所有输出信号将保持其状态。屏幕的更新频率为 10Hz,因此,特别快的信号可能
无法正确显示。
可配置 I/O 可为安装设置的安全 I/O 配置部分中定义的特殊安全设置保留( 请参阅1.21.13. 安全
I/O在本页95) ;保留的 I/O 将使用安全功能的名称代替默认名称或用户定义的名称。为安全设
置保留的可配置输出不可切换,仅以 LED 显示。
有关信号的电气详细信息,请参阅1.9.3. 控制器 I/O在本页28一章。
电 压
在“工具输出”中,仅当工具输出由用户控制时,才能配置电压。选择URCap会删除对电压的访
问。
模 拟 域 设 置
模拟 I/O 可设置为电流 [4-20mA] 输出或电压 [0-10V] 输出。保存程序时,系统将记住该设置,以
便在后续重新启动机器人控制器时使用。在工具输出中,选择URCap会删除对模拟工具输入
域设置的访问。
用 户 手 册 113 UR5
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
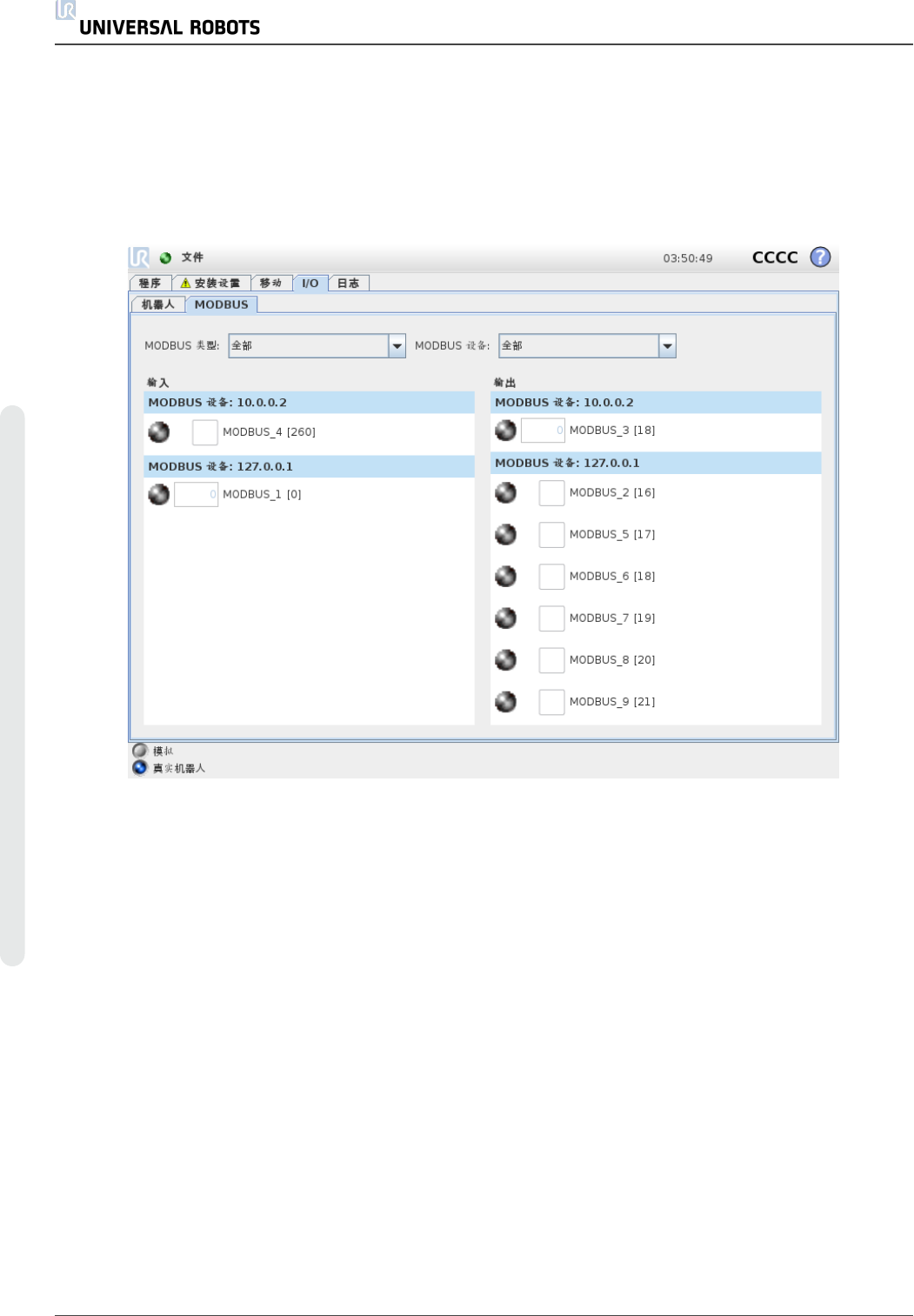
1.24.3. MODBUS
下面的截屏显示了在安装设置中设置的 MODBUS 客户端 I/O 信号。如果设置的数量不止一
个,使用页面顶部的下拉菜单可以根据信号类型和 MODBUS 单元更改显示的内容。列表中的
每一个信号都包含连接状态、数值、名称和信号地址。如果连接状态和 I/O 选项卡的控制选择
允许,则可以切换输出信号( 请参阅1.24.8. 安装设置 → I/O 设置 在本页121) 。
1.24.4. 自动移动选项卡
当机器人手臂必须移至其工作空间内的某个位置时需使用自动移动选项卡。比如机器人手臂
必须移动至程序的开始位置后才开始运行,又或者是移动至路点的同时更改程序。
UR5 114 用 户 手 册
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
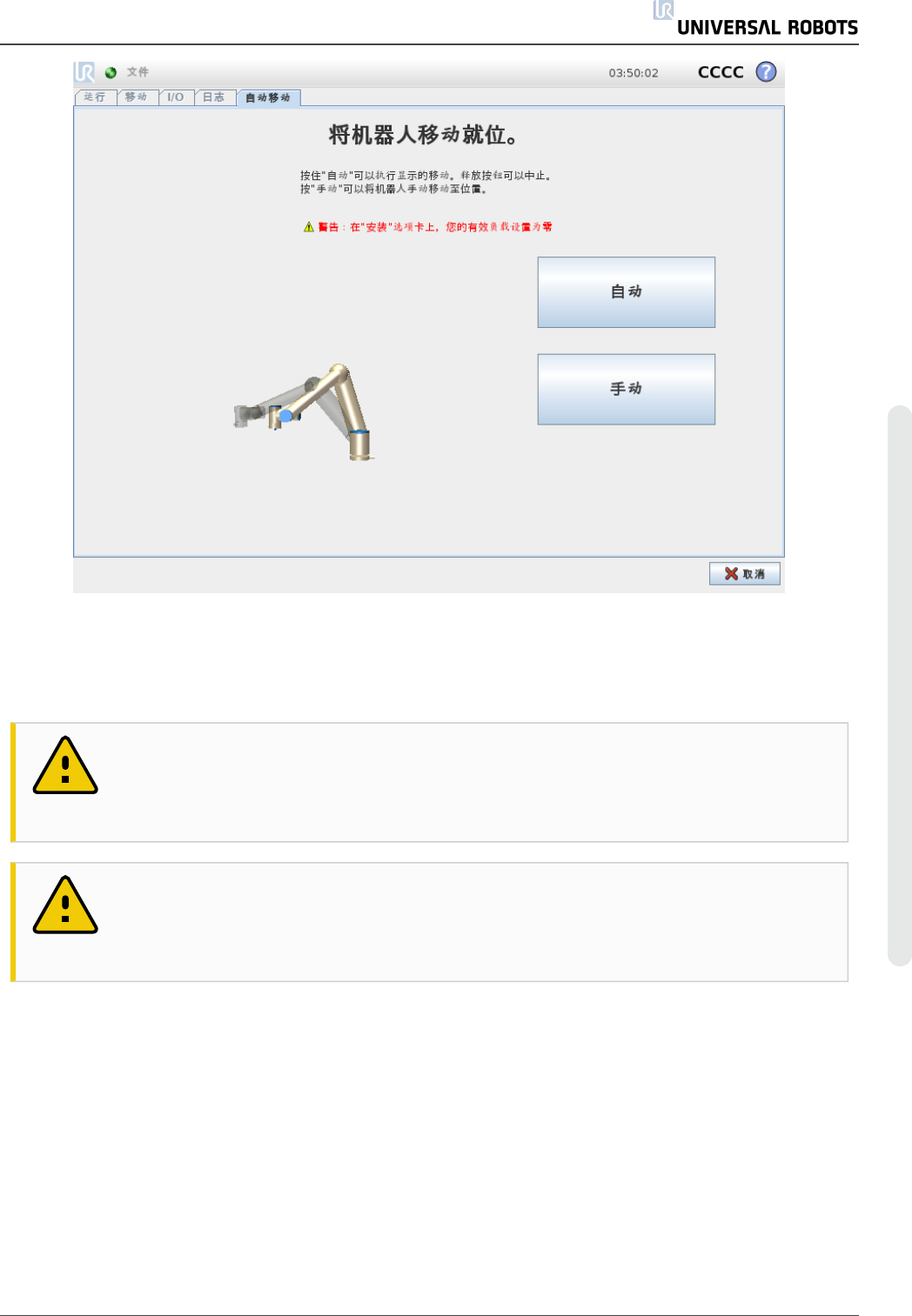
动 画
动画显示机器人手臂将要进行的动作。
小心
比较动画和真实机器人手臂的位置,确保机器人手臂可以安全地运动,不会打
到障碍物。
小心
自动移动功能使机器人沿着阴影区轨迹移动。碰撞可能会损坏机器人或其他设
备。
自 动
按住自动按钮可按动画所示移动机器人手臂。
注意:可随时释放该按钮,使机器人停止运动。
手 动
按下手动按钮将跳转至移动选项卡,在此选项卡中可以手动移动机器人手臂。如果动画中的
运动不理想,则可以采用手动模式。
用 户 手 册 115 UR5
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。