99312_UR5_User_Manual_zh_E67ON_Global.pdf - 第27页
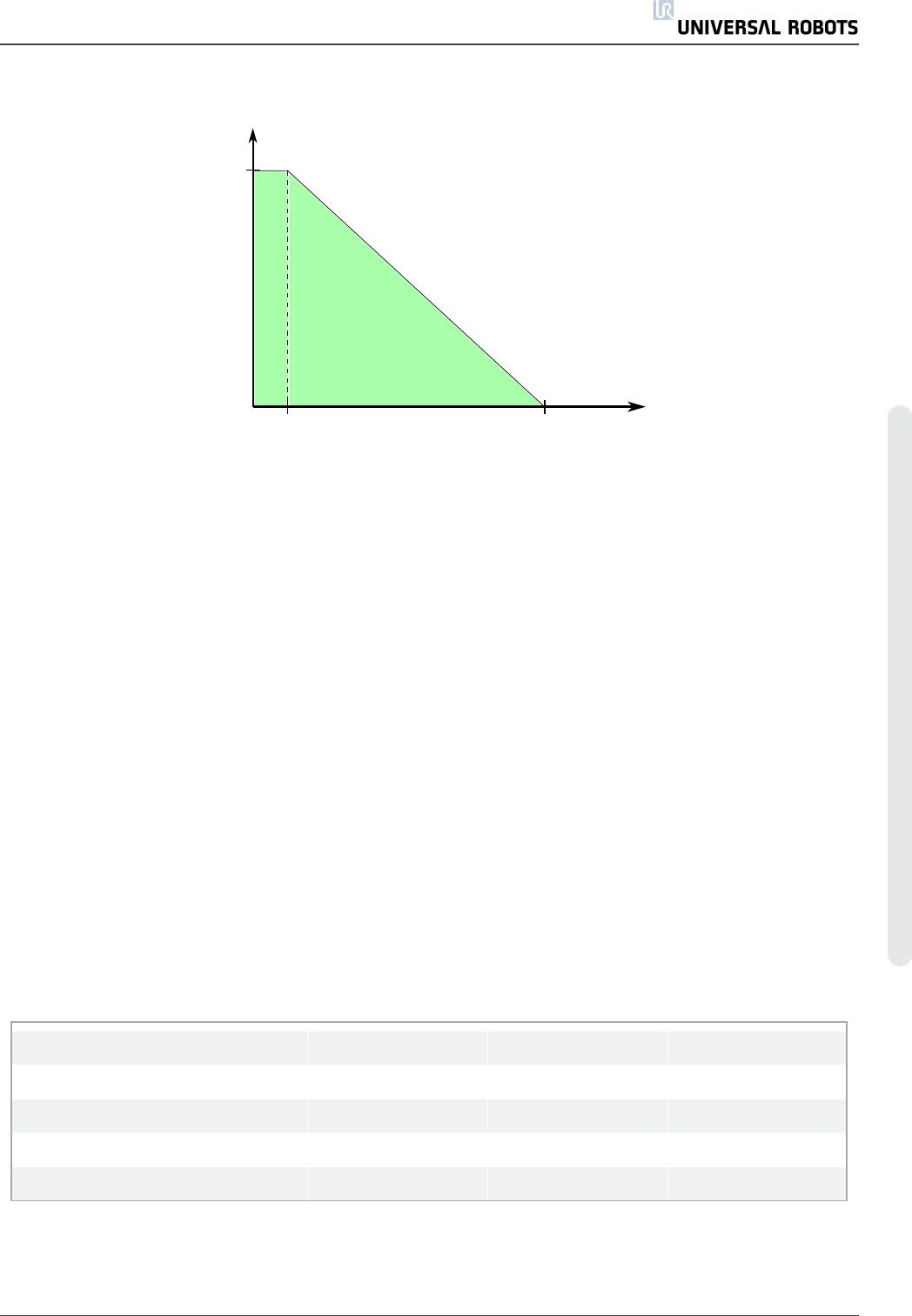
监 控 安 全 输 入 Max joint speed in normal mode [ rad / s ] [ s ] time 0.524 0.024 4.2 : 斜 坡 下 面 的 绿 色 区 域 即 制 动 过 程 中 允 许 的 关 节 速 度 。 在 0 点 处 , 安 全 处 理 器 检 测 到 一 个 事 件 ( 紧 急 停 止 或 防 护 停 止 ) 。 减 速 在 24 ms 后 开 始 。 1 类 和 2 类 停 …
限制级安全功能 限值
TCP 速度 250mm/s
TCP 力 100N
动量 10kg m/s
功率 80W
如果违反这些限制,安全系统发出 0 类停机。
警告
请注意,在恢复模式下,
关节位置
、
TCP 位置
以及
TCP 方向
限值会被禁用。将
机器人手臂移回极限范围内时应小心。
1.6.5. 安全相关的电气接口
机器人配备多个安全相关的电气输入和输出。所有安全相关的电气输入和输出均为双通道。
当信号很低时,它们很安全,在信号很高 (+24V),紧急停止没有激活等情况下,它们也很安
全。
安 全 相 关 的 电 气 输 入
下表概述了安全相关的电气输入。
安全输入 描述
机器人紧急
停止
( 专用输入) 。执行 1 类停机,可使用
系统紧急停止
输出( 如果已配置) 将其转发
给其他机器。
紧急停止按
钮
( 示教盒安全装置) 。执行 1 类停机,可使用
系统紧急停止
输出( 如果已配置) 将
其转发给其他机器。
系统紧急停
止
( 可配置输入) 。执行 1 类停机。为了避免死锁,此信号不会通过
系统紧急停止
输出转发给其他机器。
防护停止 ( 专用输入) 。执行 2 类停机。
防护重置 ( 可配置输入) 。当防护重置输入出现边沿时,使机器人从
防护停止
状态恢复。
缩减模式 ( 可配置输入) 。安全系统过渡为
缩减
模式限值。
3 档位使动
装置
( 可配置输入) 。当操作模式输入为高电平时,功能为防护停止。
操作模式 ( 可配置输入) 。当 3 档位启用设备配置时,使用操作模式。
1 类停机和 2 类停机在驱动电源开启的情况下对机器人减速,使机器人在不偏离当前路径的情
况下停止。
UR5 16 用 户 手 册
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
监 控 安 全 输 入
Max joint
speed in
normal
mode
[rad/s]
[s]
time
0.5240.024
4.2:
斜坡下面的绿色区域即制动过程中允许的关节速度。在 0 点处,安全处理器检测到一
个事件( 紧急停止或防护停止) 。减速在 24 ms 后开始。
1 类和 2 类停机由安全系统按照以下方式进行监控:
1. 安全系统会监视是否在 24 ms 内启动制动,请参见图 4.2。
2. 如果关节在移动,将监视其速度,确保速度永远不会超过通过在 500 ms 内从
正常
模式的
最大关节速度限值持续减速到 0 rad/s 而获得的速度。
3. 如果关节处于静止状态( 关节速度小于 0.2 rad/s) ,将监视其移动到的位置距离测得速度
低于 0.2 rad/s 时的位置不超过 0.05 rad。
此外,对于 1 类停机,安全系统将监视机器人手臂静止后电源关闭是否在 600 ms 内完成。另外
在防护停止输入后,机器人手臂只能在防护重置输入的正沿后才允许开始移动。如果不满足
上述任何情况,安全系统将发出 0 类停机。
向缩减模式输入触发的
缩减
模式的过渡受到如下监视:
1. 触发缩减模式输入后,安全系统接受 500 ms
正常
和
缩减
模式限值设置。
2. 在 500 ms 后,只有
缩减
模式限值有效。
如果不满足上述任何情况,安全系统将发出 0 类停机。
0 类停机由安全系统执行,其表现如下表中所示。最坏情况下的反应时间是全速和满载荷运行
的机器人从停止到
断电
( 放电到低于 7.3 V 的电势) 的时间。
安全输入功能 检测时间 断电时间 反应时间
机器人紧急停止 250ms 1000ms 1250ms
紧急停止按钮 250ms 1000ms 1250ms
系统紧急停止 250ms 1000ms 1250ms
防护停止 250ms 1000ms 1250ms
用 户 手 册 17 UR5
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
安 全 相 关 的 电 气 输 出
下表概述了安全相关的电气输出。
安全输出 描述
系统紧急
停止
当
机器人紧急停止
输入为逻辑低电平或按下紧急停止按钮时,为逻辑低电平。
机器人运
动
当此信号为逻辑高电平时,机器人手臂每个关节的移动都不会超过 0.1 rad。
机器人未
停止
当由于紧急停止或防护停止而使机器人停止或处于停止过程中时为逻辑高电
平。否则将为逻辑低电平。
缩减模式 Logic low when the safety system is in
Reduced
mode.
非缩减模
式
缩减模式
输出取反。
如果安全输出设置不当,安全系统将发出 0 类停机,其最坏情况下的反应时间为:
安全输出 最坏情况反应时间
系统紧急停止 1100ms
机器人运动 1100ms
机器人未停止 1100ms
缩减模式 1100ms
非缩减模式 1100ms
1. 停机类别符合 IEC 60204-1,请参见术语表了解更多详细信息。↩
UR5 18 用 户 手 册
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。