99312_UR5_User_Manual_zh_E67ON_Global.pdf - 第172页
1.2 5.10. 命 令 : 等 待 等 待 会 将 I/O 信 号 或 表 达 式 暂 停 给 定 的 一 段 时 间 。 如 果 选 择 不 等 待 , 则 不 执 行 任 何 操 作 。 U R5 1 62 用 户 手 册 版 权 所 有 © 2 009–2021U ni ver s al R obots A/S 。 保 留 所 有 权 利 。
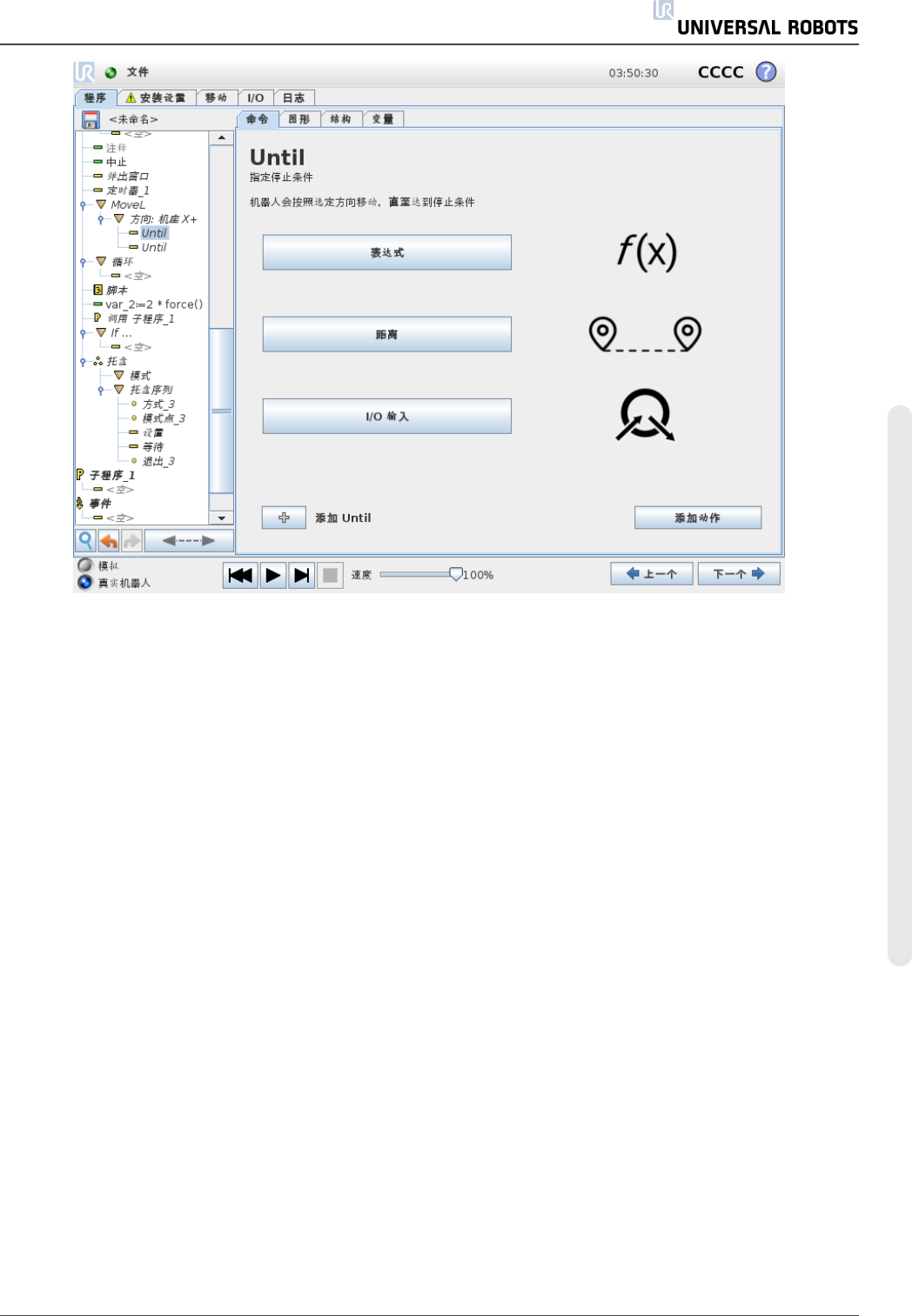
在 Until 字段中,可以定义以下停止条件:
• 添加动作 如果满足特定的 Until 条件,则添加程序节点。例如,如果检测到错误状态,可
以使用弹出节点来停止程序。
• 距离 当机器人移动一定距离时,此节点可用于停止方向移动。速度降低,因此机器人在
距离处停止。
• 表达式 此节点可用于停止由自定义程序表达式引起的运动。您可以使用I/O,变量或脚
本函数来指定停止条件。
• I/O 输入 您可以使用此节点停止 I/O 输入上的信号控制运动。
用 户 手 册 161 UR5
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
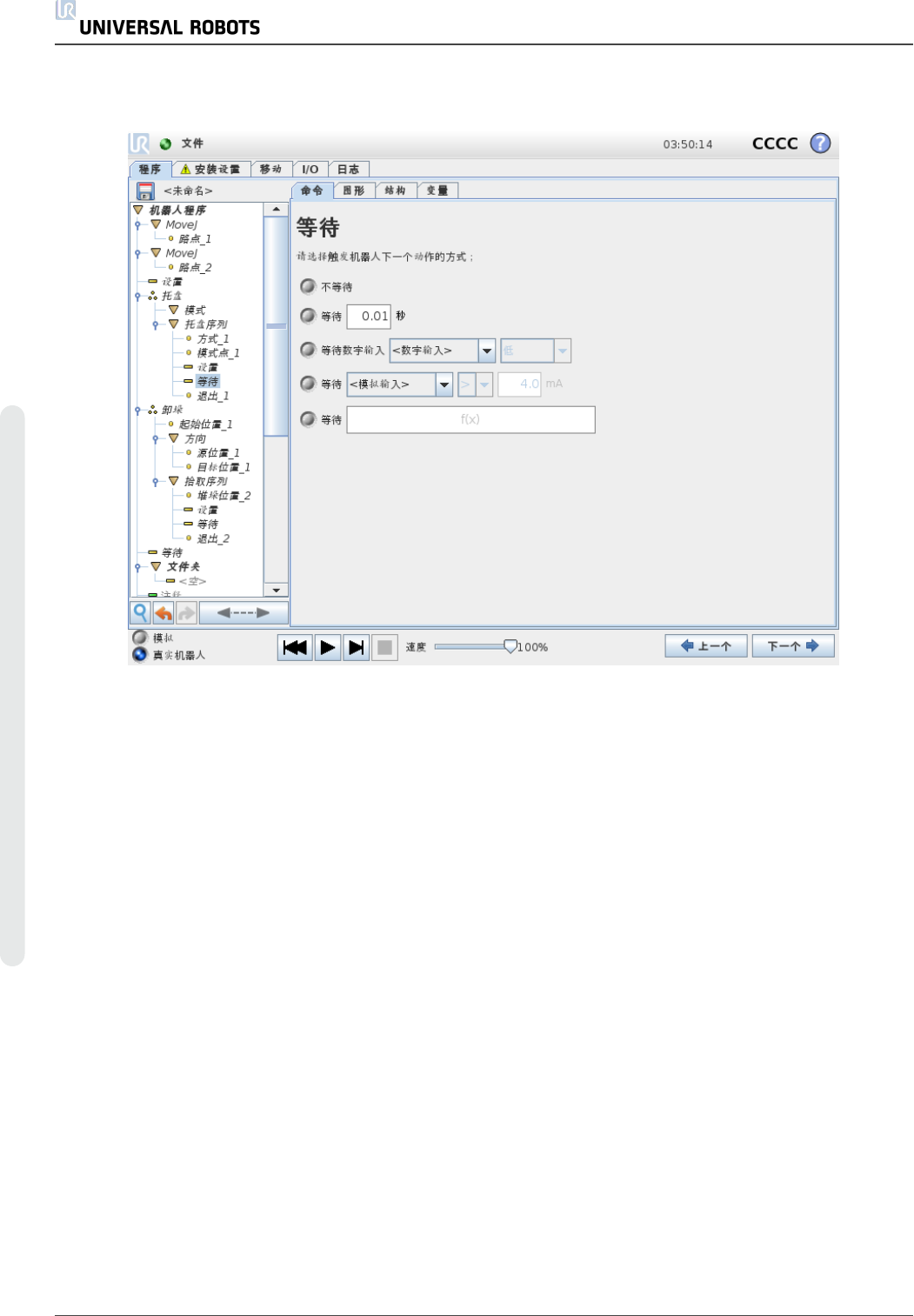
1.25.10. 命令:等待
等待会将 I/O 信号或表达式暂停给定的一段时间。如果选择不等待,则不执行任何操作。
UR5 162 用 户 手 册
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
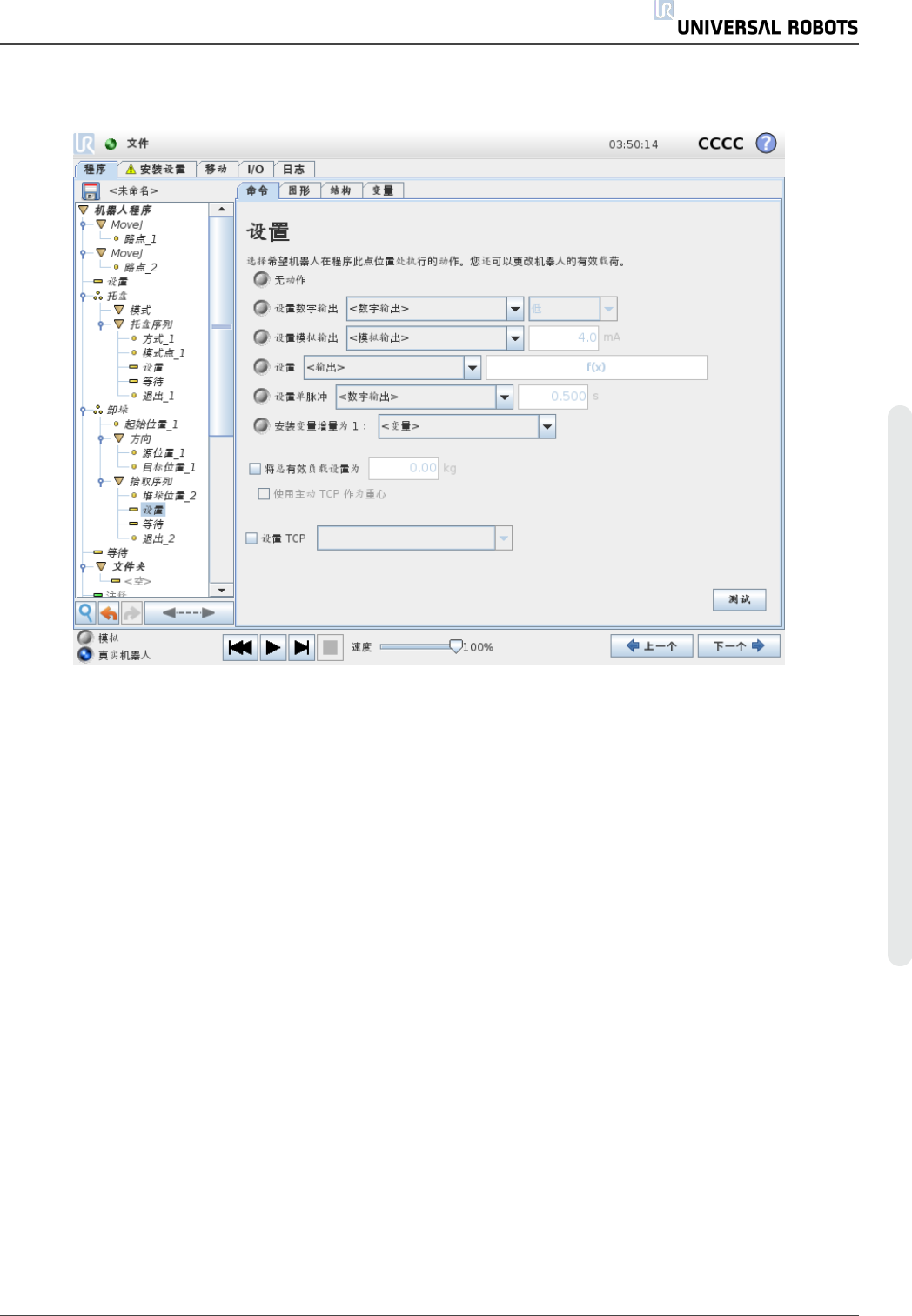
1.25.11. 命令:设置
将数字输出或模拟输出设置为给定值。数字输出也可以设置为发送单个脉冲。
使用设置命令设置机器人手臂的有效载荷。如果工具处承受的重量与预期有效载荷不同,您
可以调整有效载荷重量,以避免触发机器人保护性停止。如果激活的 TCP 不应用作重心,则
必须取消选中对应的复选框。
也可以使用设置命令修改激活的 TCP,方法是选中对应的复选框并从菜单中选择一个 TCP 偏
移。
如果在编写程序时为特定运动指定的激活 TCP 已知,请考虑改用移动卡上的 TCP 选择( 请参
阅1.25.4. 命令:移动 在本页149) 。有关配置指定 TCP 的更多信息,请参阅1.24.6. 安装设置 →
TCP 配置 在本页117。
用 户 手 册 163 UR5
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。