99312_UR5_User_Manual_zh_E67ON_Global.pdf - 第218页
由 制 造 商 设 定 这 些 是 根 据 IMM 制 造 商 的 设 置 而 具 有 特 定 用 途 的 信 号 。 机 器 人 的 运 行 并 不 依 赖 于 这 些 具 体 的 信 号 , 可 以 根 据 需 要 加 以 使 用 。 安 全 在 机 器 人 列 中 , 紧 急 停 止 和 自 由 模 塑 区 ( 电 气 ) 指 示 器 不 能 从 此 屏 幕 进 行 控 制 。 这 些 指 示 器 仅 指 示 机 器 人 是 否 …
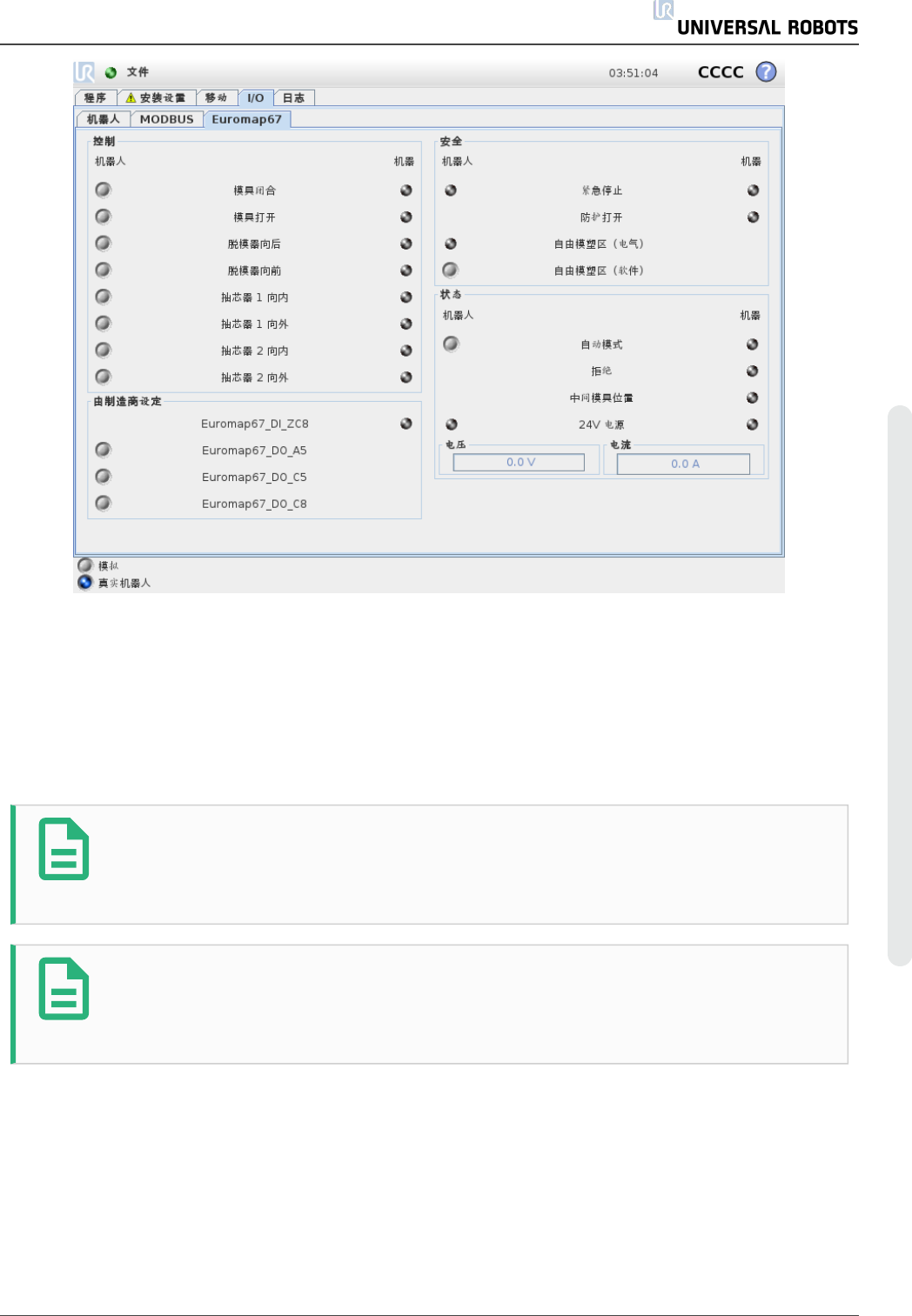
此屏幕中有四个框架,下面将逐一介绍。这四个框都包含
机器人
和
机器
这两列,分别显示用于
控制输出信号的按钮以及用于显示输入信号状态的指示器。
启动时,信号的( 一般) 状态均为低电平,但不包括
24V
信号和机器人输出
自动模式
,机器人自
动模式输出信号是低电平有效,因此默认设置为高电平。
如果某信号并不在程序结构中,但希望在机器人程序中使用该信号,则可以利用
动作
和
等待
等节点来实现。
提示
从机器人发往 IMM 的“自动模式”信号为低电平有效。该按钮反映的是实际电
平,因此该按钮未激活时,表示“自动模式”已激活。
提示
默认情况下,用于控制输出信号的按钮只能在机器人编程模式下使用。不过,
这可以根据需要在
安装设置
屏幕上的
I/O 设置
选项卡中进行设置。
控 制
此部分显示的是与控制机器人和 IMM 之间的交互相关的信号。这些信号都以适当可靠的方式
嵌入到程序结构中使用。
用 户 手 册 207 UR5
EUROMAP 67 Interface
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
由 制 造 商 设 定
这些是根据 IMM 制造商的设置而具有特定用途的信号。机器人的运行并不依赖于这些具体的
信号,可以根据需要加以使用。
安 全
在机器人列中,
紧急停止
和
自由模塑区( 电气)
指示器不能从此屏幕进行控制。这些指示器仅
指示机器人是否处于紧急停止状态以及 MAF 输出是否设置为高。MAF 输出设置为高必须满足
一个条件,即模塑区( 可能使用安全光幕,如上所述) 的电气监视信号和软件发送的 MAF 信号
均为高。软件发送的 MAF 信号可由相应的按钮予以控制。机器发送的紧急停止信号指示 IMM
是否已紧急停机。
防护打开
输入显示 Euromap 67 标准中规定的“安全装置”信号的状态。
状 态
在此部分,可以控制/查看机器人和 IMM 的运行模式( 这些信号也用于程序结构中) 。显示电压
和电流消耗的横条表示 Euromap 67 模块传输给 IMM 或可能传输给安全光幕的值。
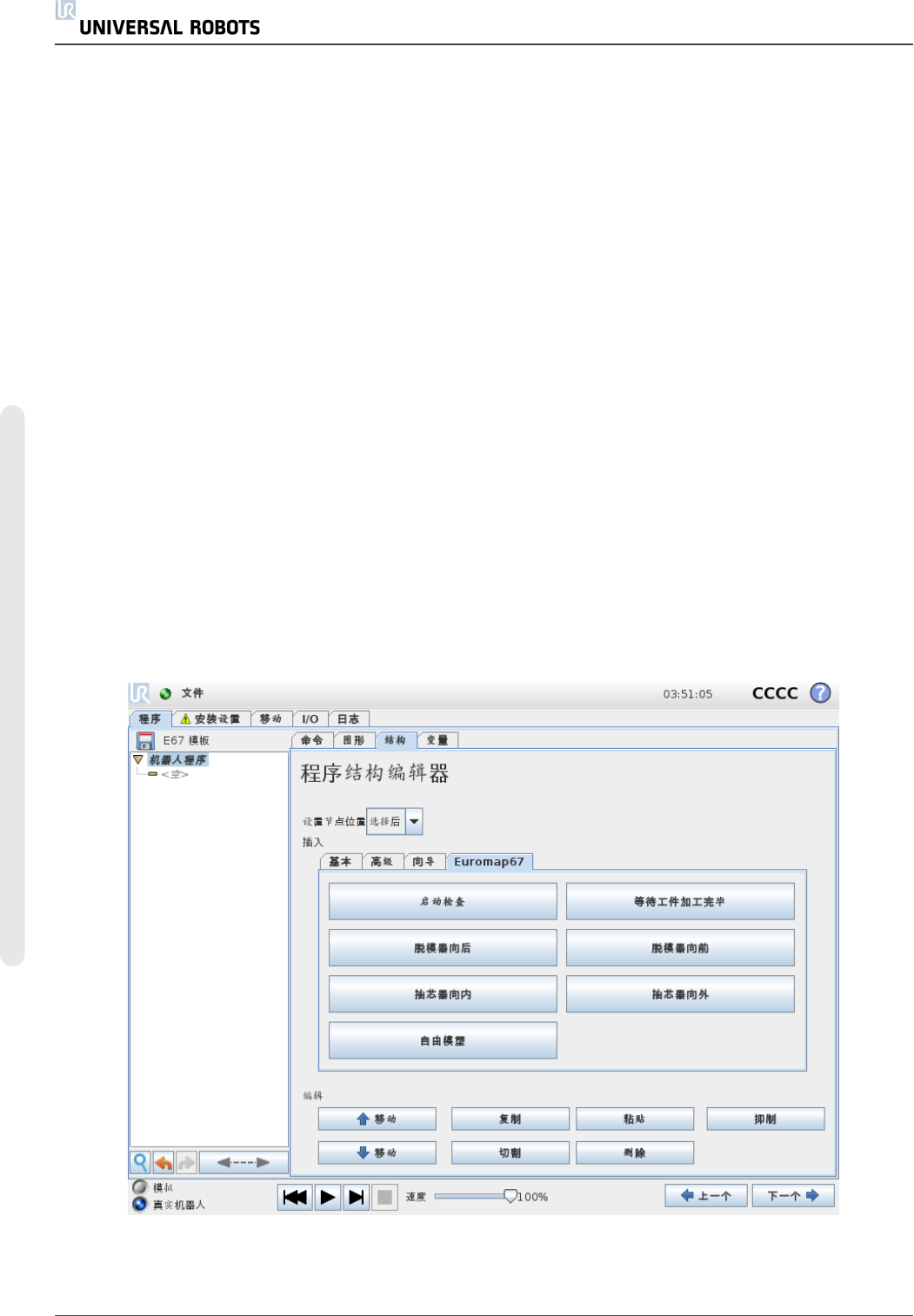
1.29.3. 程序结构功能
共有七种程序结构,可以通过“程序”屏幕上的
结构
选项卡进行选择。正确安装 euromap67 接口
( 如1.30. 安装和卸载接口 在本页216中所述) 后,这些结构即可使用。有关使用示例,请参阅
Euromap 67 程序模板。
所有结构都可实现与 IMM 进行正确安全的交互,因此,这些结构都包括用以确定特定信号设
置是否正确的测试。此外,这些结构可能会设置多个输出来启动一个动作。
UR5 208 用 户 手 册
EUROMAP 67 Interface
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
将程序结构插入机器人程序后,可以通过在程序中选择结构,然后点击
命令
选项卡对结构进
行自定义。所有程序结构都由若干步骤组成。大多数步骤默认处于启用状态,一些步骤可能因
对结构必不可少而无法禁用。如果测试条件未得到满足,则
测试
步骤会使程序停止。输入和输
出的状态均可测试。
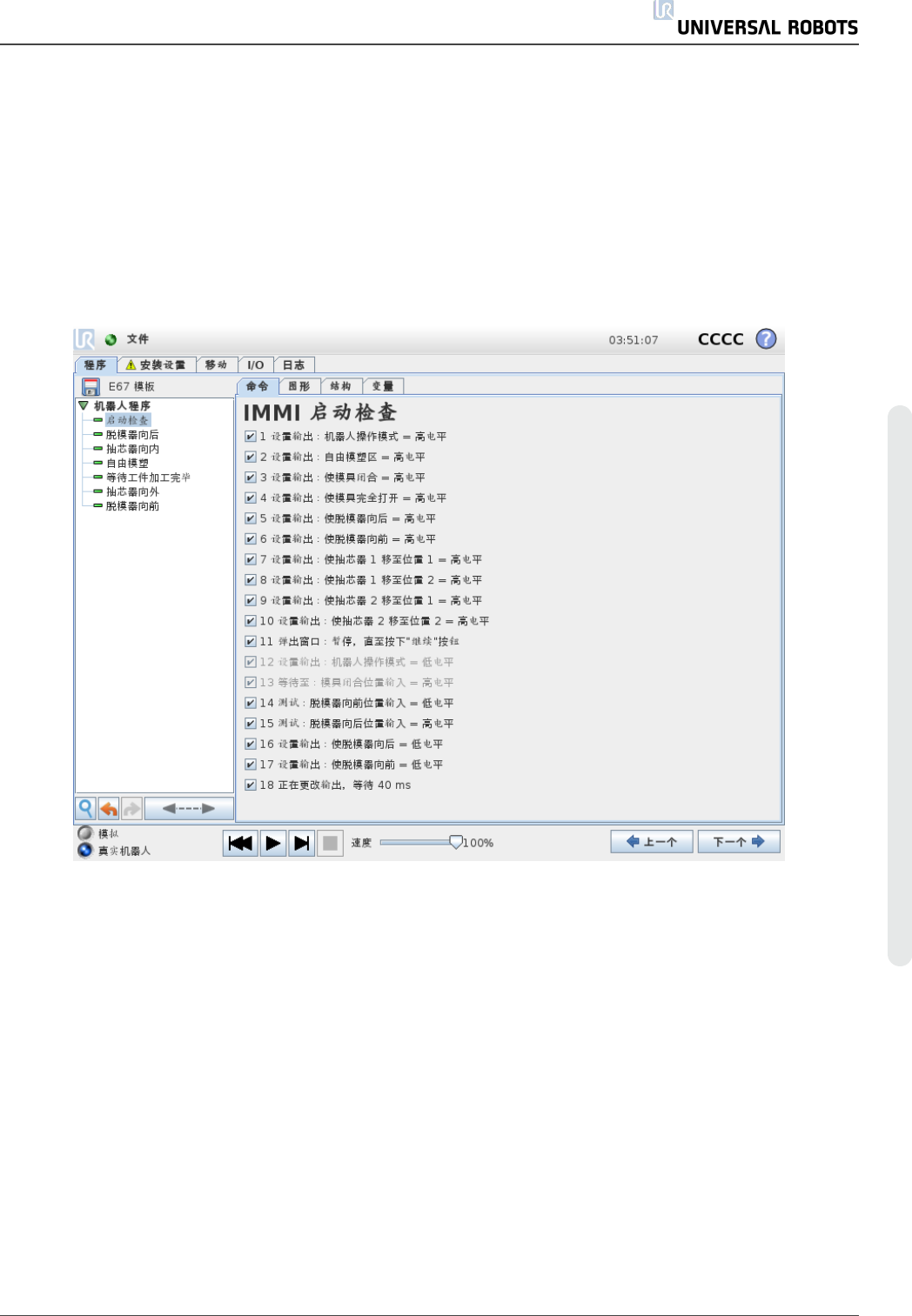
设置输出
步骤可将指定的输出设置为高电平或低电平。
等待至
步骤通常
用于指示等到某个移动完成后再继续执行后续步骤和后续程序节点。
启 动 检 查
机器人程序开始处使用一次,以在开始执行模塑之前确保机器人和机器设置正确。使用复选
框可启用/禁用各个步骤。
用 户 手 册 209 UR5
EUROMAP 67 Interface
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。