99312_UR5_User_Manual_zh_E67ON_Global.pdf - 第199页
1.2 5.34. 结 构 选 项 卡 使 用 程 序 结 构 选 项 卡 可 以 插 入 、 移 动 、 复 制 和 移 除 各 种 命 令 。 要 插 入 新 命 令 , 请 执 行 以 下 步 骤 : 1. 选 择 现 有 程 序 命 令 。 2. 选 择 应 将 新 命 令 插 入 所 选 命 令 的 上 方 还 是 下 方 。 3. 按 要 插 入 的 命 令 类 型 所 对 应 的 按 钮 。 要 调 整 新 命 令 的 详…
如果机器人 TCP 的当前位置距离安全平面或触发平面很近,或者机器人工具的方向接近工具
方向边界限值( 请参阅1.21.12. 边界 在本页89) ,则会显示边界限值的 3D 表示。
当机器人在运行程序时,边界限值可视化将被禁用。
安全板以黄黑色呈现,带小箭头指示安全板正常,显示安全板上允许放置机器人 TCP 的位
置。
触发平面以蓝色和绿色显示,并带有一个指向平面一侧的小箭头,在这一侧,正常模式限值
( 请参阅1.21.6. 安全模式 在本页84) 处于激活状态。
工具方向边界限值以锥体呈现,带有一个指示机器人工具当前方向的矢量。锥体内侧代表工
具方向的允许区域( 矢量) 。
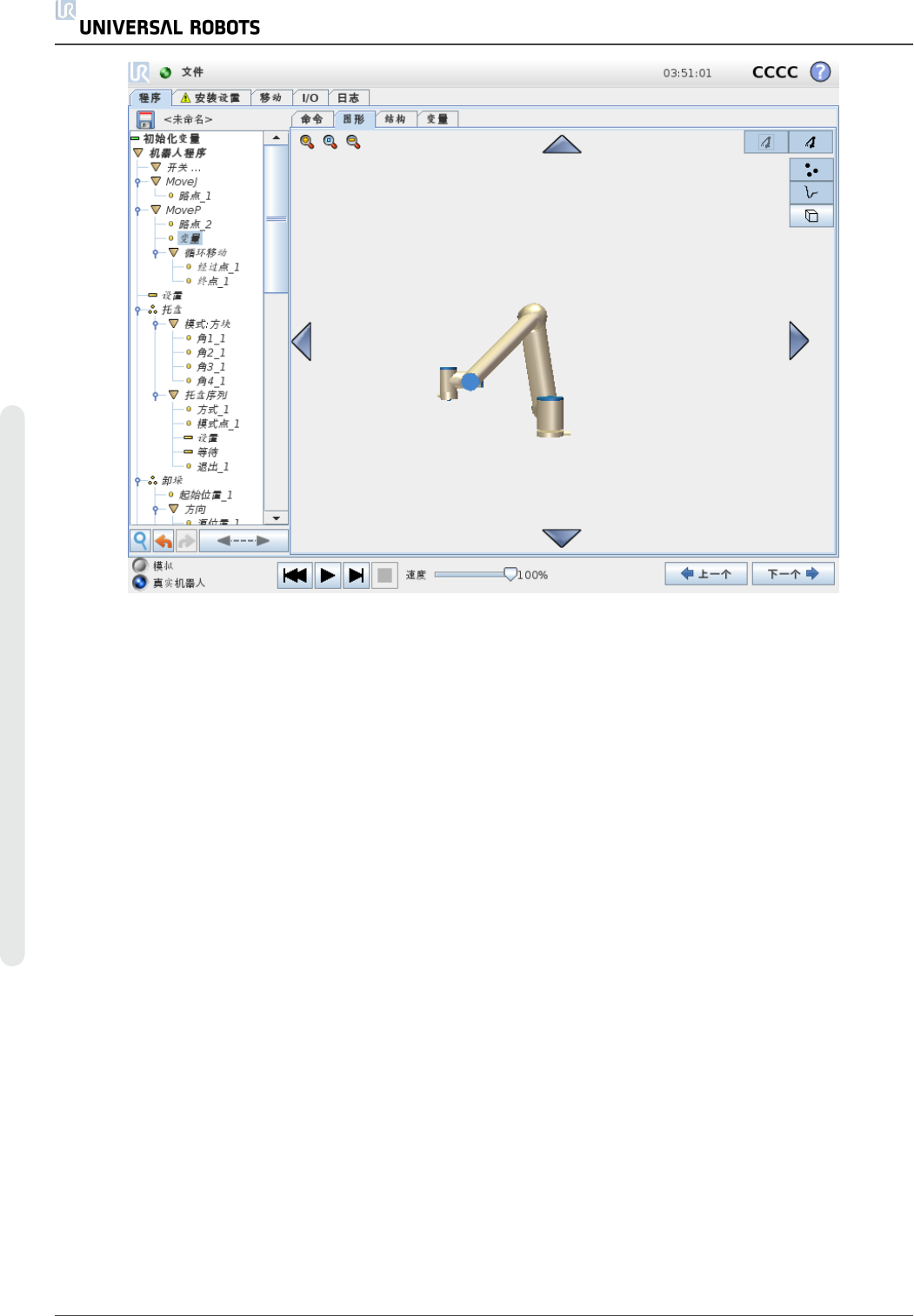
目标机器人 TCP 离开极限区域时,3D 成像消失。如果 TCP 侵犯边界限值或接近边界限值,则
成像会变成红色。
3D 视角可进行缩放和旋转,以更好地显示机器手臂的运动状态。屏幕右上角的按钮可以禁用
3D 视角中的各个图形组件。底部按钮可开启/关闭相邻边界限制成像。显示的运动段取决于所
选的程序节点。如果选择了Move节点,则显示的路径是由该移动定义的运动。如果选择了路
点节点,屏幕将显示接下来大约 10 步移动。
UR5 188 用 户 手 册
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
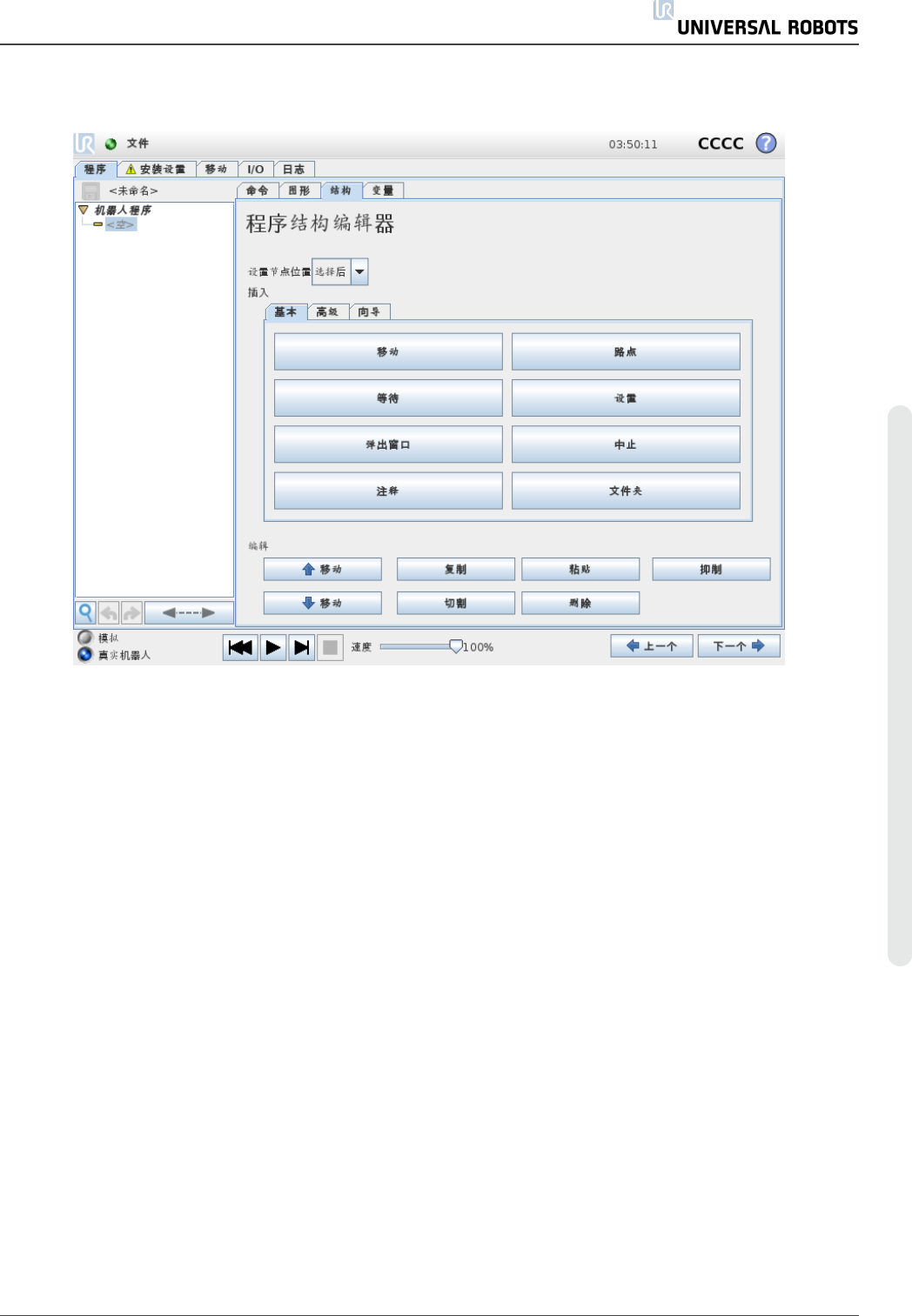
1.25.34. 结构选项卡
使用程序结构选项卡可以插入、移动、复制和移除各种命令。
要插入新命令,请执行以下步骤:
1. 选择现有程序命令。
2. 选择应将新命令插入所选命令的上方还是下方。
3. 按要插入的命令类型所对应的按钮。要调整新命令的详细信息,请转至Command选项
卡。
使用编辑框架中的按钮可以移动/复制/删除命令。如果命令含有子命令( 命令旁边有一个三角
形符号) ,则所有子命令也将随之移动/复制/删除。
并非所有命令都适合放在程序中的所有位置。一般来说,移动 ElseIf 命令可能会很麻烦。使用
变量之前必须为其赋值。
用 户 手 册 189 UR5
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
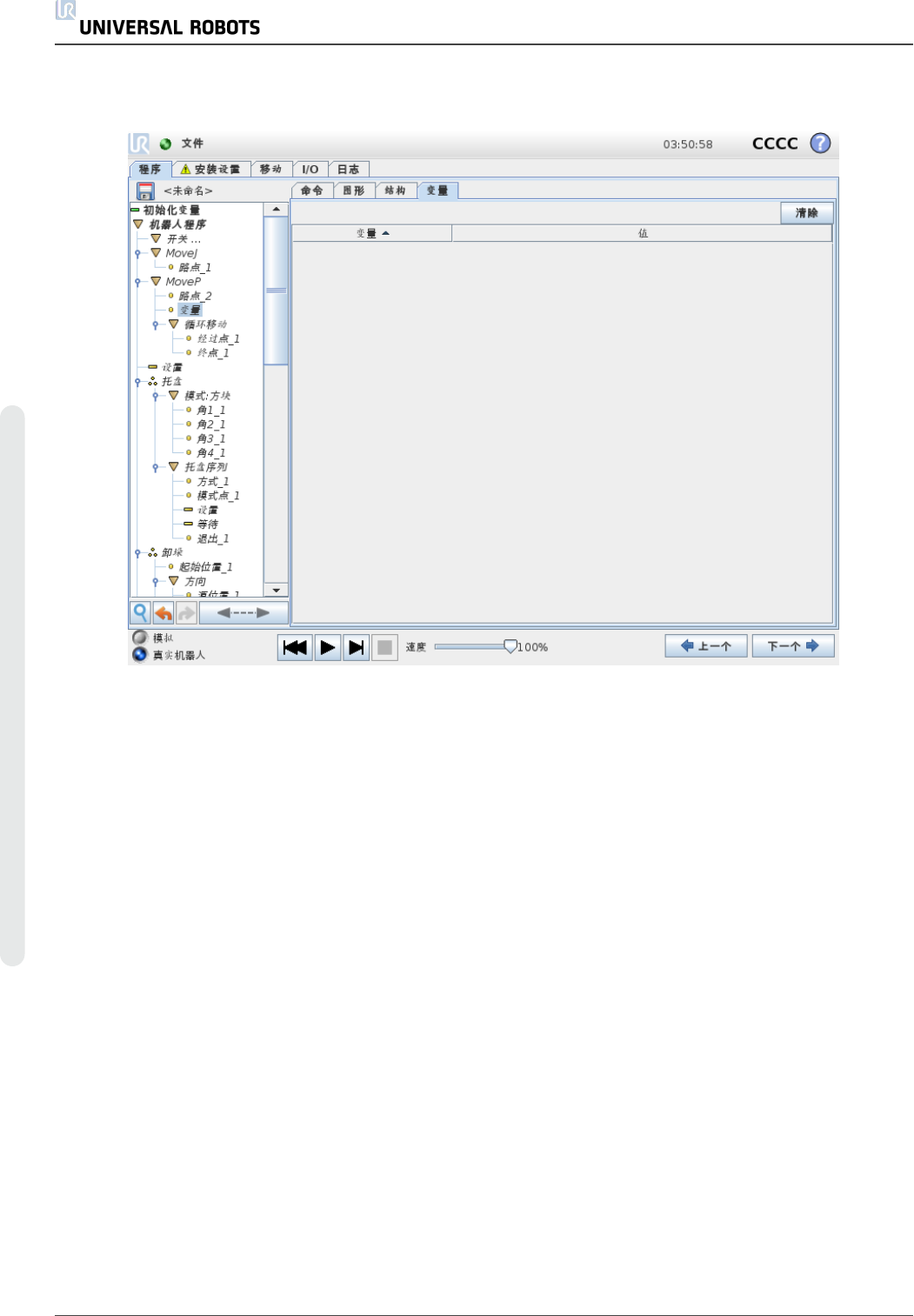
1.25.35. 变量选项卡
变量选项卡显示运行中程序的实时变量值,并保存程序运行之间的变量和值的列表。它仅在
有信息要显示时出现。变量按其名称的字母顺序排列。此屏幕上的变量名最多以 50 个字符显
示,变量值最多以 500 个字符显示。
UR5 190 用 户 手 册
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。