99312_UR5_User_Manual_zh_E67ON_Global.pdf - 第129页
即 使 通 常 只 要 三 个 位 置 便 足 可 确 定 TC P , 但 仍 然 需 要 使 用 第 四 个 位 置 来 进 一 步 验 证 计 算 结 果 正 确 。 每 个 为 计 算 所 得 TC P 保 存 的 点 的 质 量 通 过 相 应 按 钮 上 的 LED 为 绿 色 、 黄 色 还 是 红 色 来 指 示 。 示 教 T C P 方 向 1. 点 按 测 量 。 2. 从 下 拉 列 表 中 选 择 一 个 特 …

主 动 TCP
当进行线性移动时,机器人总是使用激活TCP定义TCP偏移量。可以使用一个“移动”命令( 请
参阅1.25.4. 命令:移动 在本页149) 或“设置”命令更改激活的 TCP。
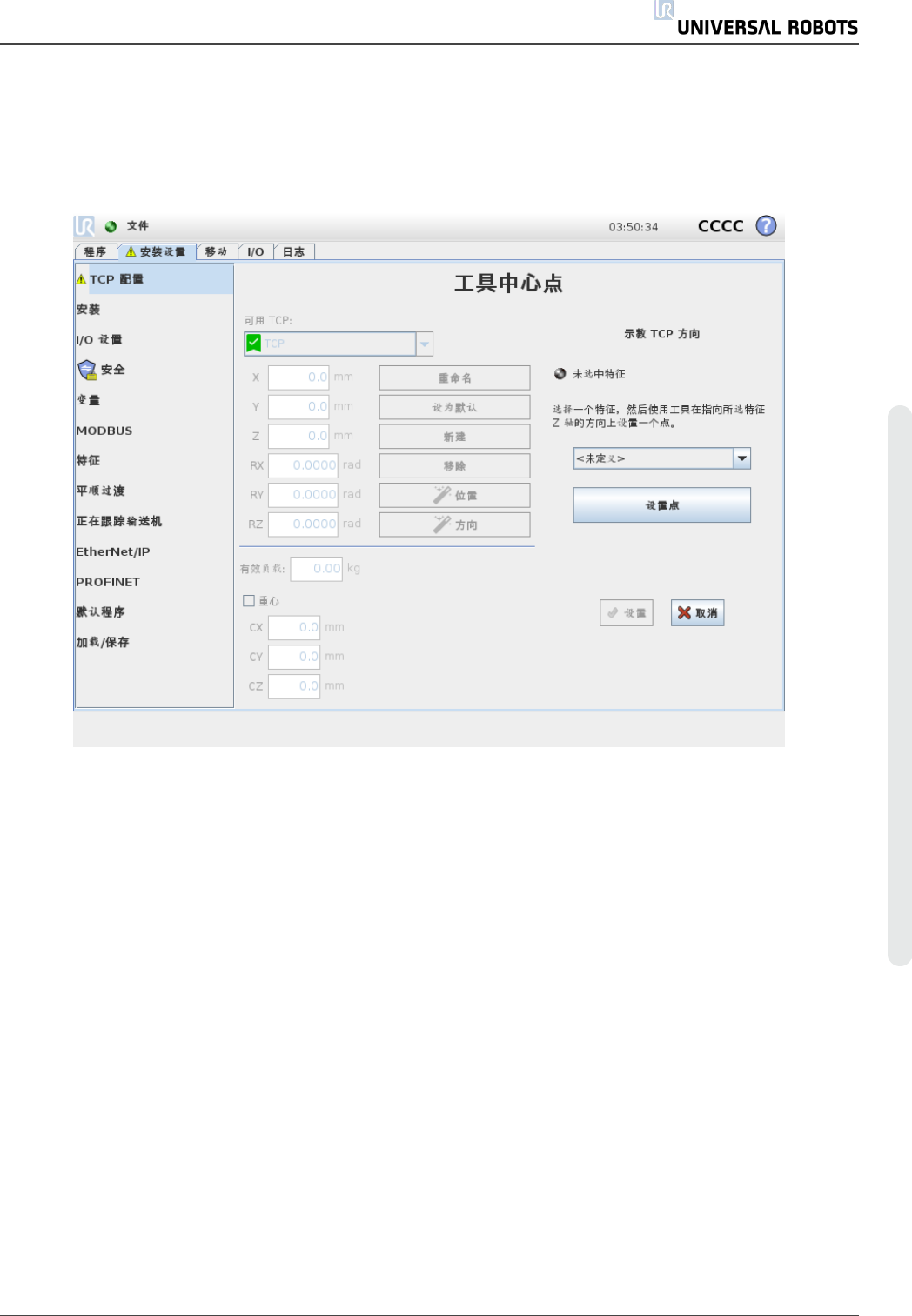
默 认 的 TCP
运行一个程序前,必须按照激活TCP设置默认TCP。
• 选择所需的 TCP,点按设为默认将 TCP 设置为默认 TCP。
可用下拉菜单中的绿色图标表示默认配置的TCP
示 教 TCP 位 置
TCP 位置坐标可通过以下步骤自动计算:
1. 点按测量。
2. 在机器人工作空间中选择一个固定的点。
3. 使用屏幕右侧的位置箭头从至少三个不同角度移动 TCP,并保存工具输出法兰的相应
位置。
4. 使用设置按钮将验证的坐标应用于合适的 TCP。这些位置必须足够多样化,以确保计算
结果正确。如果它们不够多样化,按钮上方的状态 LED 将变为红色。
UR5 118 用 户 手 册
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
即使通常只要三个位置便足可确定 TCP,但仍然需要使用第四个位置来进一步验证计算结果
正确。每个为计算所得 TCP 保存的点的质量通过相应按钮上的 LED 为绿色、黄色还是红色来
指示。
示 教 TCP 方 向
1. 点按测量。
2. 从下拉列表中选择一个特征。有关定义新特征的更多信息,请参阅1.24.12. 安装设置 →
特征 在本页129。
3. 点按设置点并使用移动工具箭头移动到工具的方向和相应的 TCP 与所选特征的坐标系
重合的位置。
4. 验证计算的 TCP 方向,并点按设置将其应用于所选 TCP。
有 效 载 荷
机器人工具的重量在屏幕的下半部分指定。要更改此设置,只需点击空白文字字段并输入新
值。所作设置将应用于所有指定的 TCP。有关最大允许有效载荷的详细信息,see the
Hardware Installation Manual。
用 户 手 册 119 UR5
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
重 心
使用字段CX、CY和CZ指定工具的重心。这些设置适用于所有定义的 TCP。如果已对版本 3.8 之
前创建的安装进行预先设置,则它们支持将重心设置为 TCP。如果手动在 3.8 或更高版本中设
置重心,将永久移除为 TCP 设置重心的功能。
可以选择使用自定义惯量矩阵来设置惯量值。
惯量是在坐标系中指定的,其原点位于有效载荷的重心 (CoG) 处,且轴与工具法兰轴对齐。
可根据具有用户指定质量的球的惯量计算默认惯量,球的质量密度为 1g/cm
3
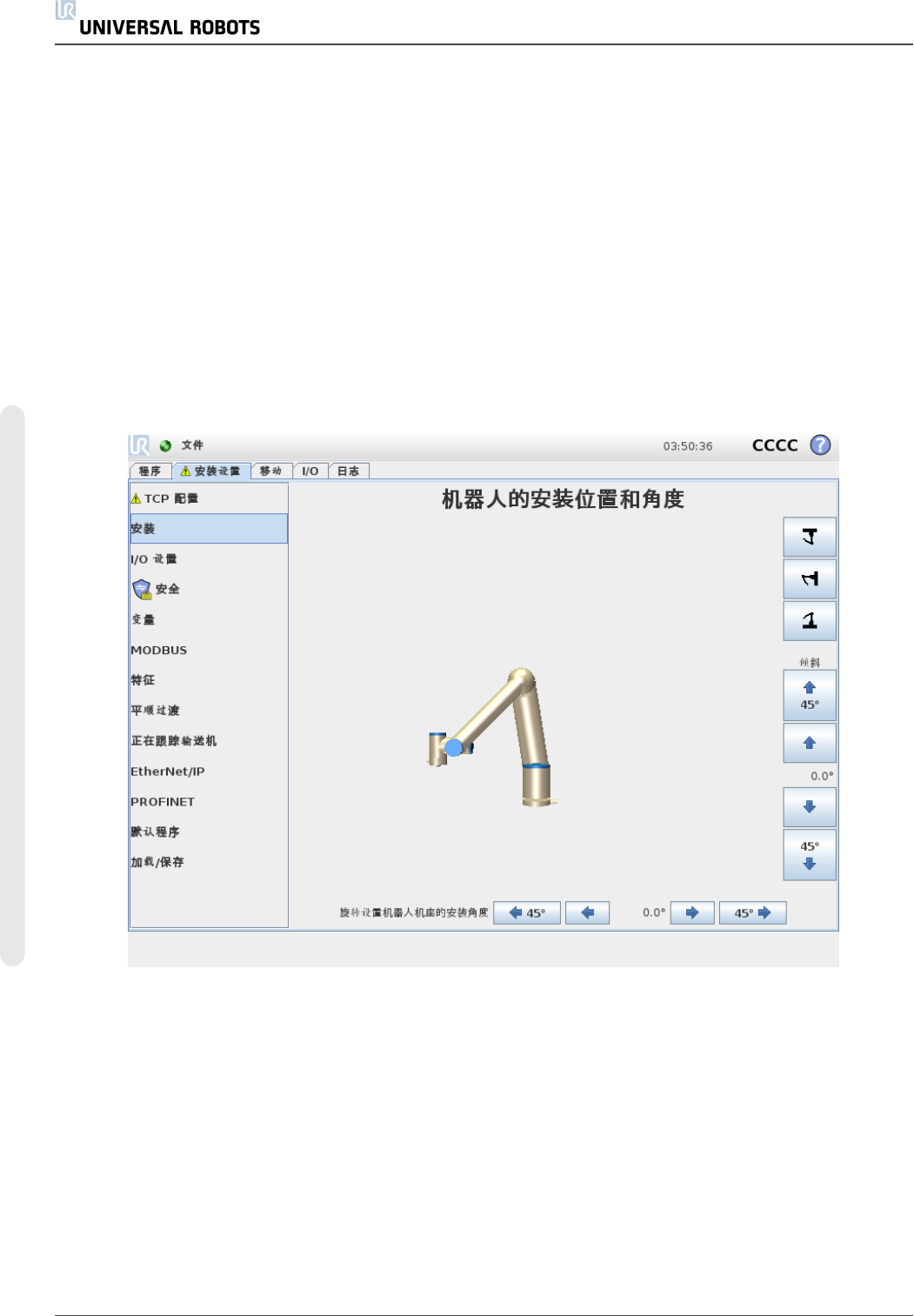
1.24.7. 安装设置 → 安装
指定机器手臂的安装有两个目的:
1. 在屏幕上正确显示机械手臂。
2. 告知控制器重力方向。
高级动力学模型可确保机器人手臂平稳精确地运动,并使机器人手臂能够将其自身保持在自
由驱动模式。为此,机械手臂的安装务必设置正确,这一点至关重要。
UR5 120 用 户 手 册
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。