99312_UR5_User_Manual_zh_E67ON_Global.pdf - 第21页
用 户 手 册 1 1 U R5 版 权 所 有 © 2 009–2021U ni ver s al R obots A/S 。 保 留 所 有 权 利 。
7. 因机器人有效载荷与坚固表面之间的冲击而导致扭伤或骨折。
8. 因用于固定机器人手臂或工具/末端执行器的螺栓松动而导致的后果。
9. 物品从工具/末端执行器上掉落,例如因夹持不到位或断电引起。
10. 因不同机器上紧急停止按钮不同而出现的操作错误。
11. 因对安全配置参数的未授权更改而出现的错误。
有关停止时间和停止距离的信息,请参阅1.6. 安全相关的功能和接口 在本页13一章和1.14. 制
动时间和制动距离 在本页51附录。
1.5.8. 紧急停止
激活紧急停止按钮,立即停止机器人的一切运动。
注意:根据 IEC 60204-1 和 ISO 13850,紧急设备不是安全防护装置。它们是补充性防护措施,
并不用于防止伤害。
机器人应用的风险评估应确定是否需要更多紧急停止按钮。紧急停止按钮必须符合 IEC
60947-5-5( 请参阅安全 I/O在本页30一节) 。
1.5.9. 有电力驱动和无电力驱动的移动
在极少发生的紧急情况中,可能需要在机器人电源失效或不想使用电源的情况下移动一个或
多个机器人关节,这可以通过以下两种不同方法来迫使机器人关节移动:
提示
注意:在维修时,无需连接电源就可以释放接头上的制动器。
1. 强制反向驱动:用力推动或拉动机器人手臂,迫使关节移动。每个关节制动器均有一个
摩擦离合器,可使关节在承受高强度扭矩的情况下移动。
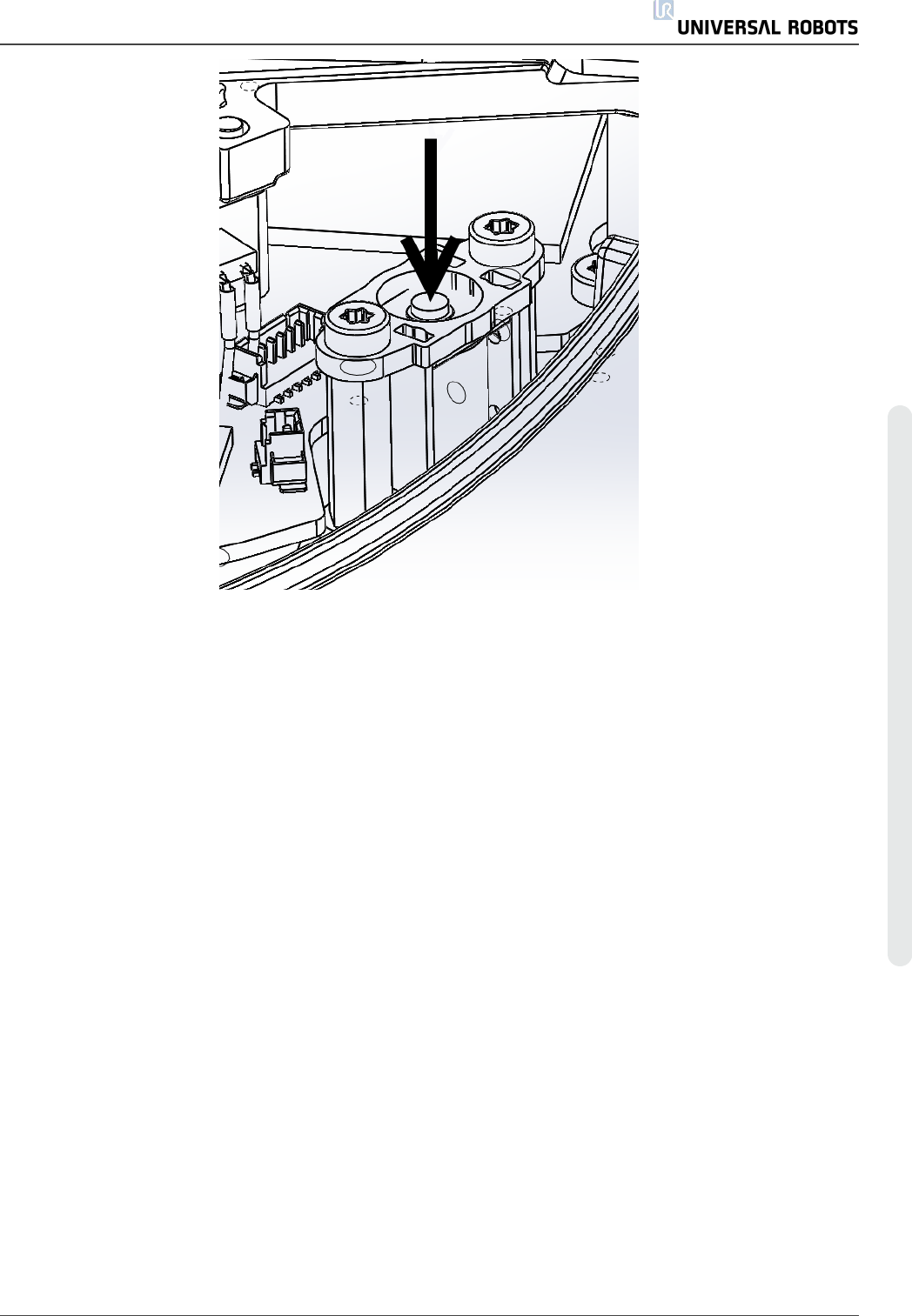
2. 手动松开制动器:卸下用于固定关节盖的几颗 M3 螺丝,拆卸关节盖。按小型电磁铁( 如
下图所示) 中的活塞,松开制动器。
警告
1. 手动移动机器手臂仅限于紧急情况,并且有可能会损坏关节。
2. 如果手动释放了制动器,万有引力可能会导致机器手臂掉落。释放制动
器时务必支撑住机器手臂、工具/末端执行器和工件。
UR5 10 用 户 手 册
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
用 户 手 册 11 UR5
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
UR5 12 用 户 手 册
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。