99312_UR5_User_Manual_zh_E67ON_Global.pdf - 第117页
1.23. 屏 幕 编 辑 器 1.2 3.1. 屏 幕 表 达 式 编 辑 器 虽然 表 达 式 本 身 是 以 文 本 形 式 进 行 编 辑 , 但 表 达 式 编 辑 器 也 提 供 了 许 多 按 钮 和 函 数 , 可 用 于 插 入 特 殊 表 达 式 符 号 , 例 如 , 表 示 相 乘 的 * 符 号 和 表 示 小 于 等 于 的 ≤ 符 号 。 使 用 屏 幕 左 上 角 的 键 盘 符 号 按 钮 可 切 换 …
UR5 106 用 户 手 册
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
1.23. 屏幕编辑器
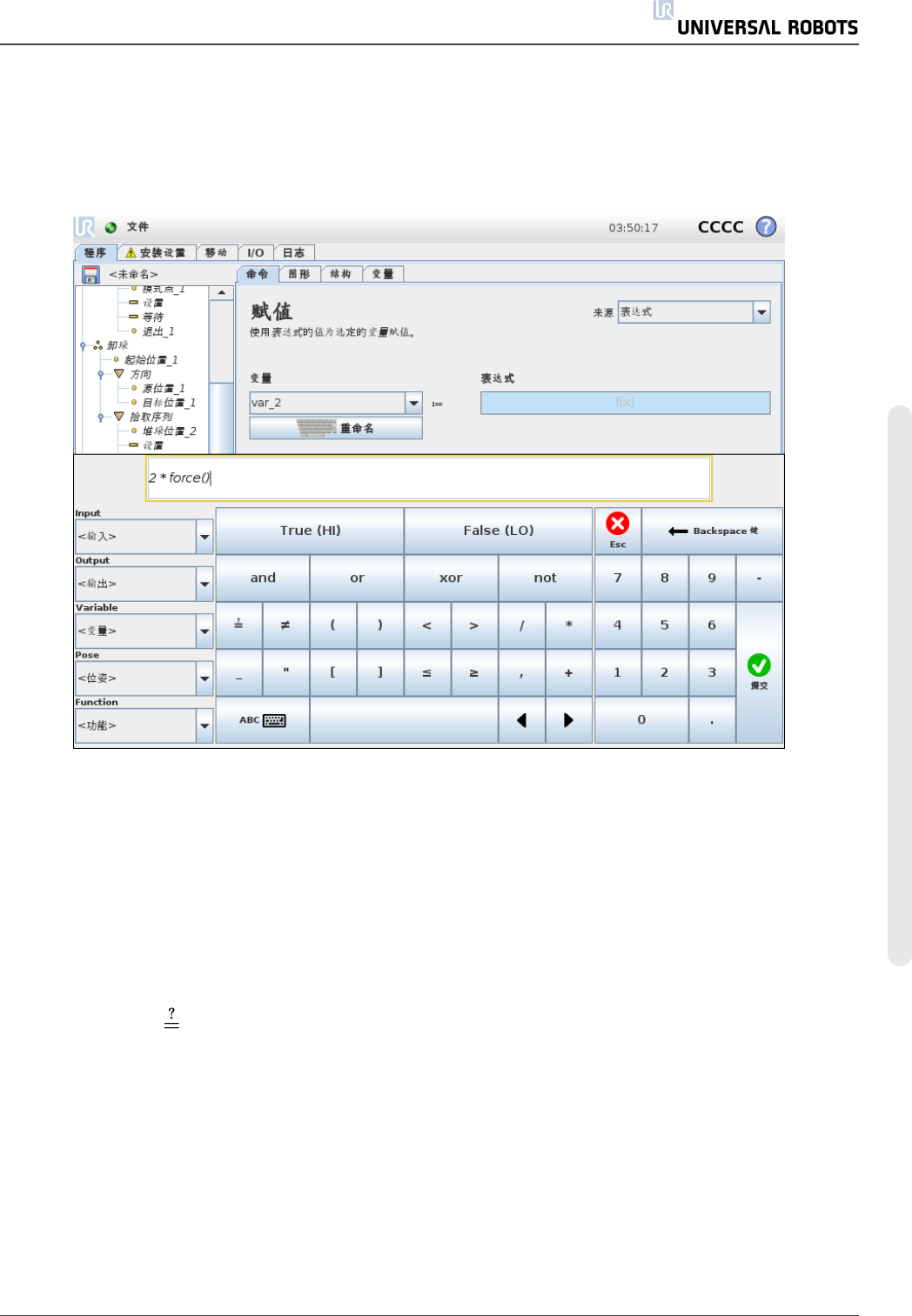
1.23.1. 屏幕表达式编辑器
虽然表达式本身是以文本形式进行编辑,但表达式编辑器也提供了许多按钮和函数,可用于
插入特殊表达式符号,例如,表示相乘的 * 符号和表示小于等于的 ≤ 符号。使用屏幕左上角的
键盘符号按钮可切换至表达式文本编辑模式。可以在Variable selector, while the names of the
input and output ports can be found in the Input and Output selectors. Some special functions are
found in Function中找到所有已定义的变量。
按“确定”按钮时,系统将检查表达式是否存在语法错误。按“取消”按钮将离开屏幕,放弃所有
更改。
表达式类似如下形式:
digital_in[1] True and analog_in[0]<0.5
1.23.2. 位姿编辑器屏幕
可以在此屏幕上指定机器人工具的目标关节位置或目标位姿( 位置和方向) 。此屏幕处于“离
线”状态,不直接控制机器人手臂。
用 户 手 册 107 UR5
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
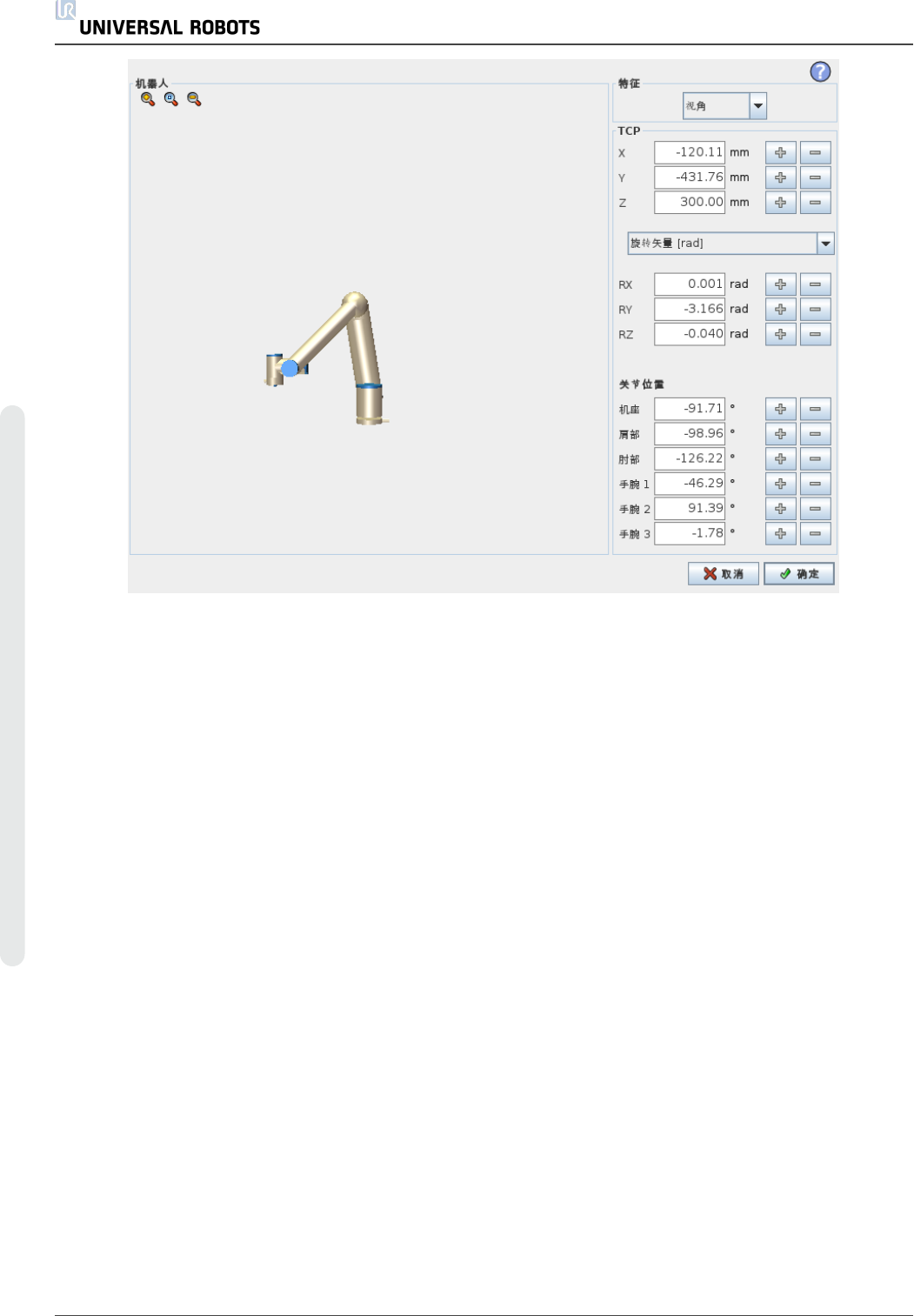
机 器 人
以 3D 视角形式显示机器人手臂的当前位置和指定的新目标位置。机器人手臂的 3D 图显示机
器人手臂的当前位置,机器人手臂的“阴影”部分显示由屏幕右侧指定值控制的机器人手臂的
目标位置。按放大镜图标可缩放视角,拖动手指图标可更改视角。
如果机器人 TCP 的指定目标位置距离安全平面或触发平面很近,或者机器人工具的方向接近
工具方向边界限值( 请参阅1.21.12. 边界 在本页89) ,则会显示相邻边界限值的 3D 表示。
安全平面以黄黑色呈现,带有一个表示安全平面正常的小箭头,指出安全平面上允许放置机
器人 TCP 的一侧。触发平面以蓝色和绿色显示,并带有一个指向平面一侧的小箭头,在这一
侧,
正常
模式限值( 请参阅1.21.6. 安全模式 在本页84) 处于激活状态。工具方向边界限值以锥
体呈现,带有一个指示机器人工具当前方向的矢量。锥体内侧代表工具方向的允许区域( 矢
量) 。
目标机器人 TCP 离开极限区域时,3D 成像消失。如果目标 TCP 违反边界限制或接近边界极
限,则成像会变成红色。
特 征 和 工 具 位 置
在屏幕右上角可找到特征选择器。特征选择器定义了用于控制机器人手臂相对应的特征
当前激活的工具中心点 (TCP) 的名称显示在特征选择器下方。有关配置多个指定 TCP 的更多
信息,请参阅1.24.6. 安装设置 → TCP 配置 在本页117。文本框显示了 TCP 相对于所选特征的
完整坐标值。X, Y and Z control the position of the tool, while RX, RY and RZ 控制工具的方向。
使用 RX, RY and RZ 框上方的下拉菜单选择方向表示形式。可用类型包括:
UR5 108 用 户 手 册
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。