99312_UR5_User_Manual_zh_E67ON_Global.pdf - 第50页
TO0 POWER 工 具 数 字 输 入 端 数 字 输 入 以 配 有 弱 下 拉 电 阻 器 的 P NP 的 形 式 实 现 。 这 意 味 着 浮 置 输 入 的 读 数 始 终 为 低 。 电 气 规 范 如 下 所 示 。 参 数 最 小 值 典 型 值 最 大 值 单 位 输 入 电 压 -0.5 - 26 V 逻 辑 低 电 压 - - 2.0 V 逻 辑 高 电 压 5.5 - - V 输 入 电 阻 - 47k -…
警告
1. 连接工具和夹持器保证中断电源时不会导致任何危险,例如工件从工具
上掉落。
2. 使用 12V 电源时要特别小心,因为编程员出错可能会导致电压变为 24V,
从而可能损坏设备和引发火灾。
提示
工具法兰 GND 相连通( 与红线相同) 。
工 具 数 字 输 出
数字输出以 NPN 的形式实现。数字输出激活后,相应的接头即会被驱动接通 GND,数字输出
端禁用后,相应的接头将处于开路( 开集/开漏) 。电气规范如下所示:
参数 最小值 典型值 最大值 单位
开路时的电压 -0.5 - 26 V
灌入 1A 电流时的电压 - 0.05 0.20 V
灌电流 0 - 600 mA
通过 GND 的电流 0 - 600 mA
下一小节中的示例显示了如何使用数字输出。
小心
1. 工具中的数字输出端没有电流限制,若超过所规定的数据,可能会导致
永久性损坏。
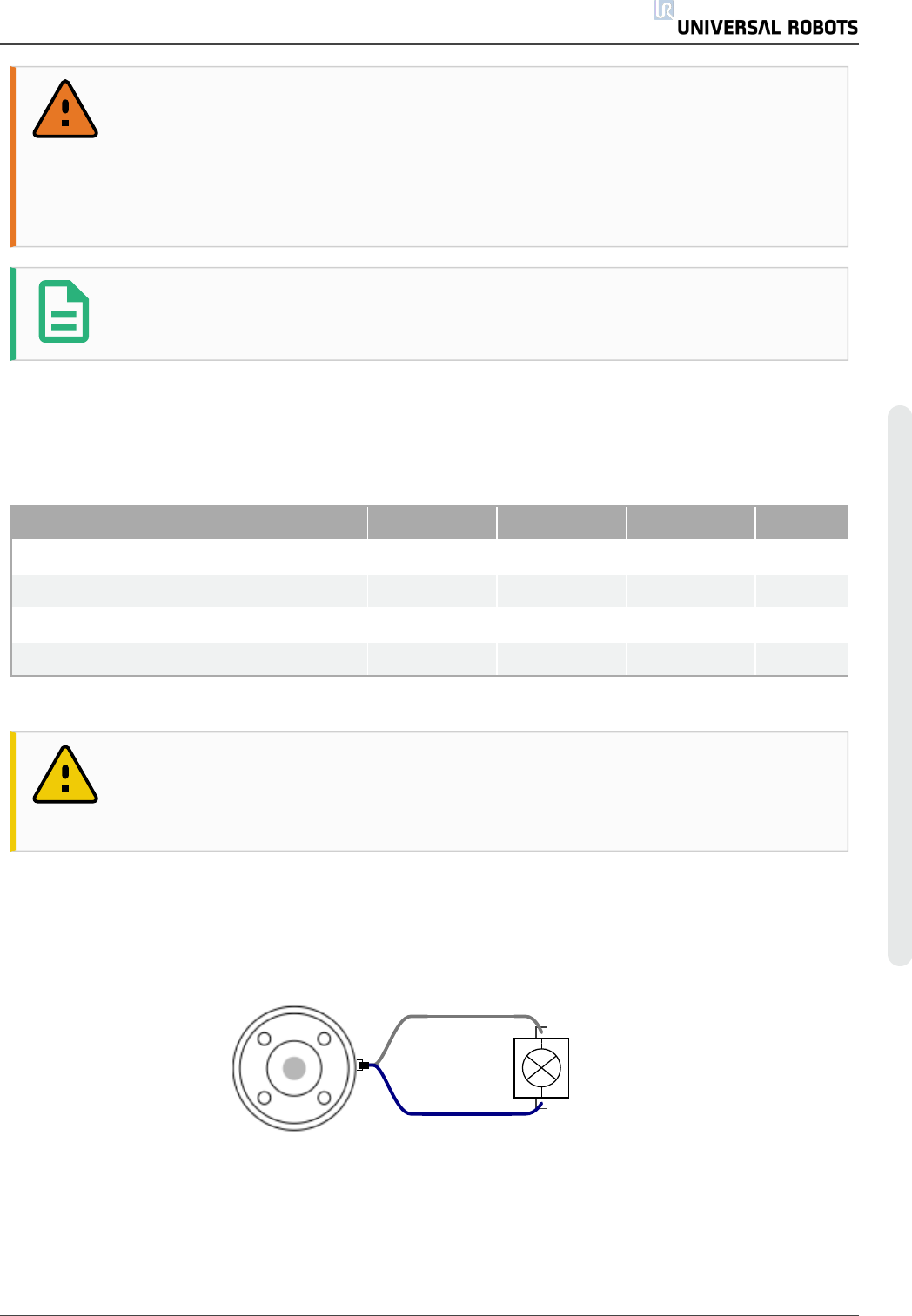
使 用 工 具 数 字 输 出
下例说明了如何在使用 12V 或 24V 的内部电源时打开负载。请记住,您必须要在 I/O 选项卡中
定义输出电压。并谨记,即使负载已关闭,电源接头和防护罩/地面之间仍存在电压。
TO0
POWER
注意:强烈建议为电感性负载使用保护二极管,如下所示。
用 户 手 册 39 UR5
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
TO0
POWER
工 具 数 字 输 入 端
数字输入以配有弱下拉电阻器的 PNP 的形式实现。这意味着浮置输入的读数始终为低。电气
规范如下所示。
参数 最小值 典型值 最大值 单位
输入电压 -0.5 - 26 V
逻辑低电压 - - 2.0 V
逻辑高电压 5.5 - - V
输入电阻 - 47k - Ω
下一小节中的示例显示了如何使用数字输入。
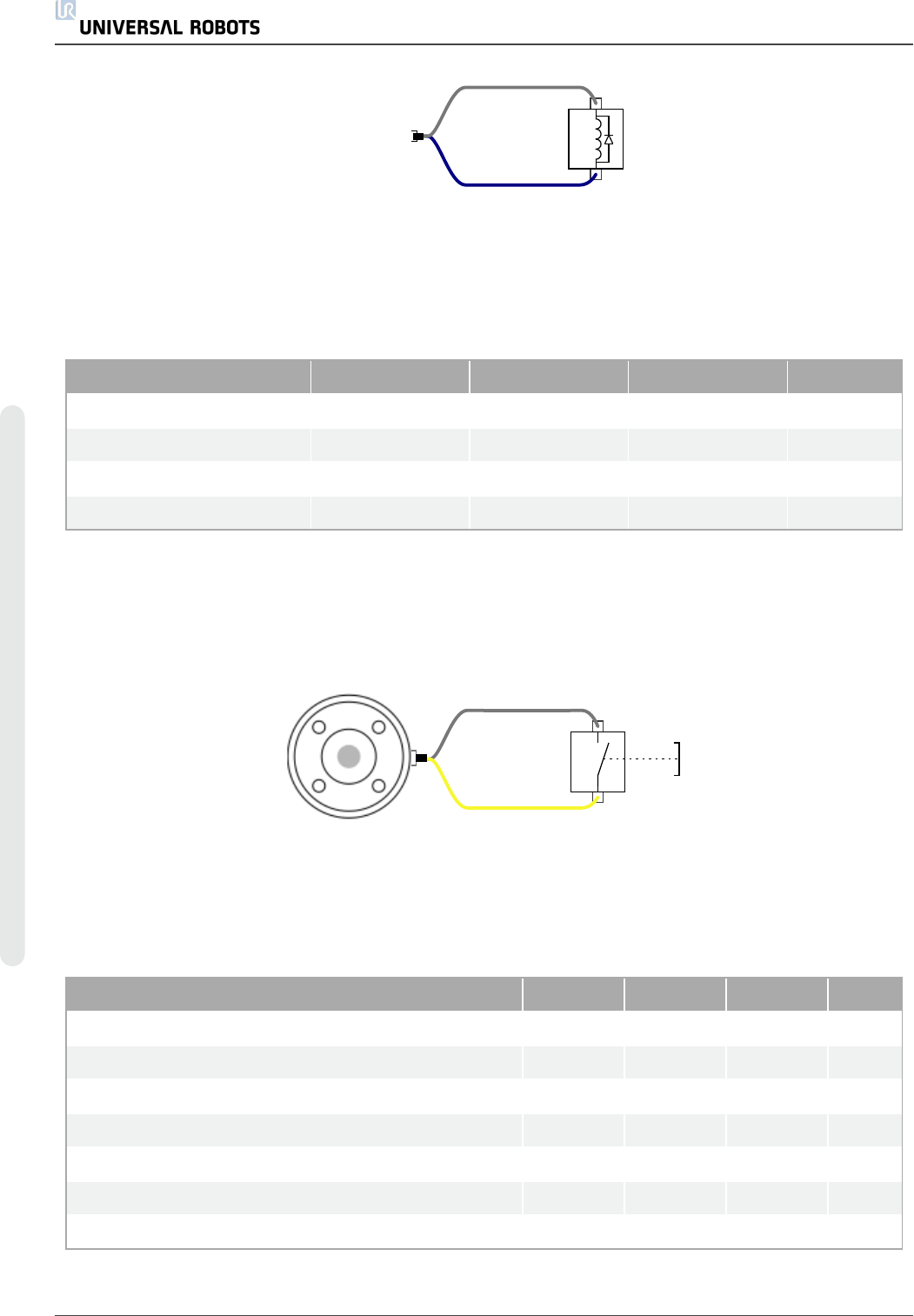
使 用 工 具 数 字 输 入
下例显示了简单按钮的连接方法。
TI0
POWER
工 具 模 拟 输 入
工具模拟输入为非差分输入,可在 I/O 选项卡上设置为电压和电流,请参阅第 II 部分PolyScope
手册 在本页79。电气规范如下所示。
参数 最小值 典型值 最大值 单位
电压模式下的输入电压 -0.5 - 26 V
0V 至 10V 电流范围内的输入电阻 - 15 - kΩ
分辨力 - 12 - 位
电流模式下的输入电压 -0.5 - 5.0 V
电流模式下的输入电流 -2.5 - 25 mA
4mA 至 20mA 电流范围内的输入电阻 - 200 - Ω
分辨力 - 12 - 位
下面的章节中举出了两个关于如何使用模拟输入的示例。
UR5 40 用 户 手 册
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
小心
1. 在电流模式下,模拟输入没有提供过电压保护。超过电气规范中的极限
可能导致输入端永久损坏。
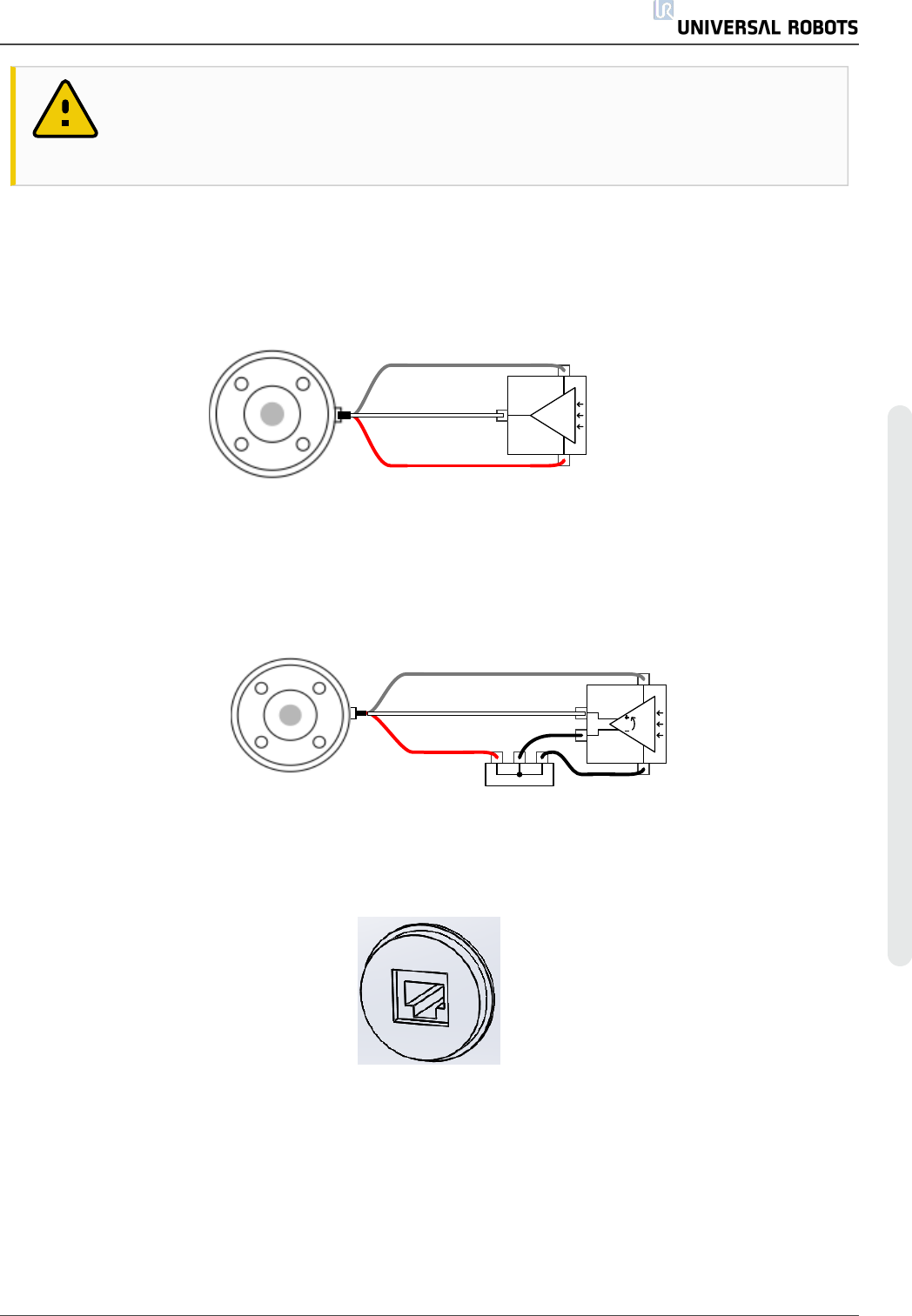
使 用 工 具 模 拟 输 入 ,非 差 分
下例显示了模拟传感器与非差分输出的连接方式。只要模拟输入的输入模式设置与 I/O 选项
卡中的设置相同,那么传感器的输出端可设置为电流模式,也可设置为电压模式。请记得检查
并确保带有电压输出端的传感器可以驱动工具的内部电阻,否则测量值可能无效。
GND
POWER
AI8
AI2
使 用 工 具 模 拟 输 入 ,差 分
下例显示了模拟传感器与差分输出的连接方式。将负输出端连接至 GND (0V),即可像非差分
传感器一样工作。
POWER
AI8
GND
AI2
1.9.5. 以太网
控制箱底部提供有以太网接口,请参见下图。
以太网接口可用于以下应用:
• MODBUS I/O 扩展模块。请参阅第 II 部分PolyScope 手册 在本页79了解更多信息。
• 远程访问和控制。
电气规范如下所示。
用 户 手 册 41 UR5
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。