99312_UR5_User_Manual_zh_E67ON_Global.pdf - 第204页
1.2 6.1. 语 言 和 单 位 Poly Sco pe 中 使 用 的 语 言 、 单 位 和 键 盘 语 言 可 以 在 该 屏 幕 设 定 。 Poly Sco pe 上 不 同 屏 幕 显 示 的 文 本 都 将 以 选 定 的 语 言 显 示 , 内 嵌 的 帮 助 文 件 也 将 以 选 定 的 语 言 显 示 。 勾 选 “E n gl is h program mi ng ” , 将 以 英 语 显 示 机 器 人 …

1.26. 设置屏幕
• 初始化机器人 转至初始化屏幕,请参阅1.22.6. 初始化屏幕 在本页104。
• 语言和单位 配置用户界面的语言和测量单位,请参阅1.26.1. 语言和单位 下一页。
• 更新机器人 将机器人软件升级到新版本,请参阅1.26.2. 更新机器人 在本页195。
• 设置密码 提供相应机制来锁定机器人的编程部分,以避免没有密码的人员执行修改,请
参阅1.26.3. 设置密码 在本页196。
• 校准屏幕 校准触摸屏的“触摸”功能,请参阅1.26.4. 校准屏幕 在本页197。
• 设置网络 打开为机器人控制箱设置以太网的界面,请参阅1.26.5. 设置网络 在本页198。
• 设置时间 设置系统的时间和日期并配置时钟的显示格式,请参阅1.26.6. 设置时间 在本
页199。
• URCap 设置 已安装的 URCap 以及安装和卸载选项的概览,请参阅1.26.7. URCap 安装
在本页200。
• 返回 返回“欢迎”屏幕。
用 户 手 册 193 UR5
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。

1.26.1. 语言和单位
PolyScope 中使用的语言、单位和键盘语言可以在该屏幕设定。
PolyScope 上不同屏幕显示的文本都将以选定的语言显示,内嵌的帮助文件也将以选定的语
言显示。勾选“English programming”,将以英语显示机器人程序内的命令名称。PolyScope 必须
重新启动,所做更改方可生效。
所选的键盘语言将在 PolyScope 的所有弹出键盘中使用。
UR5 194 用 户 手 册
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
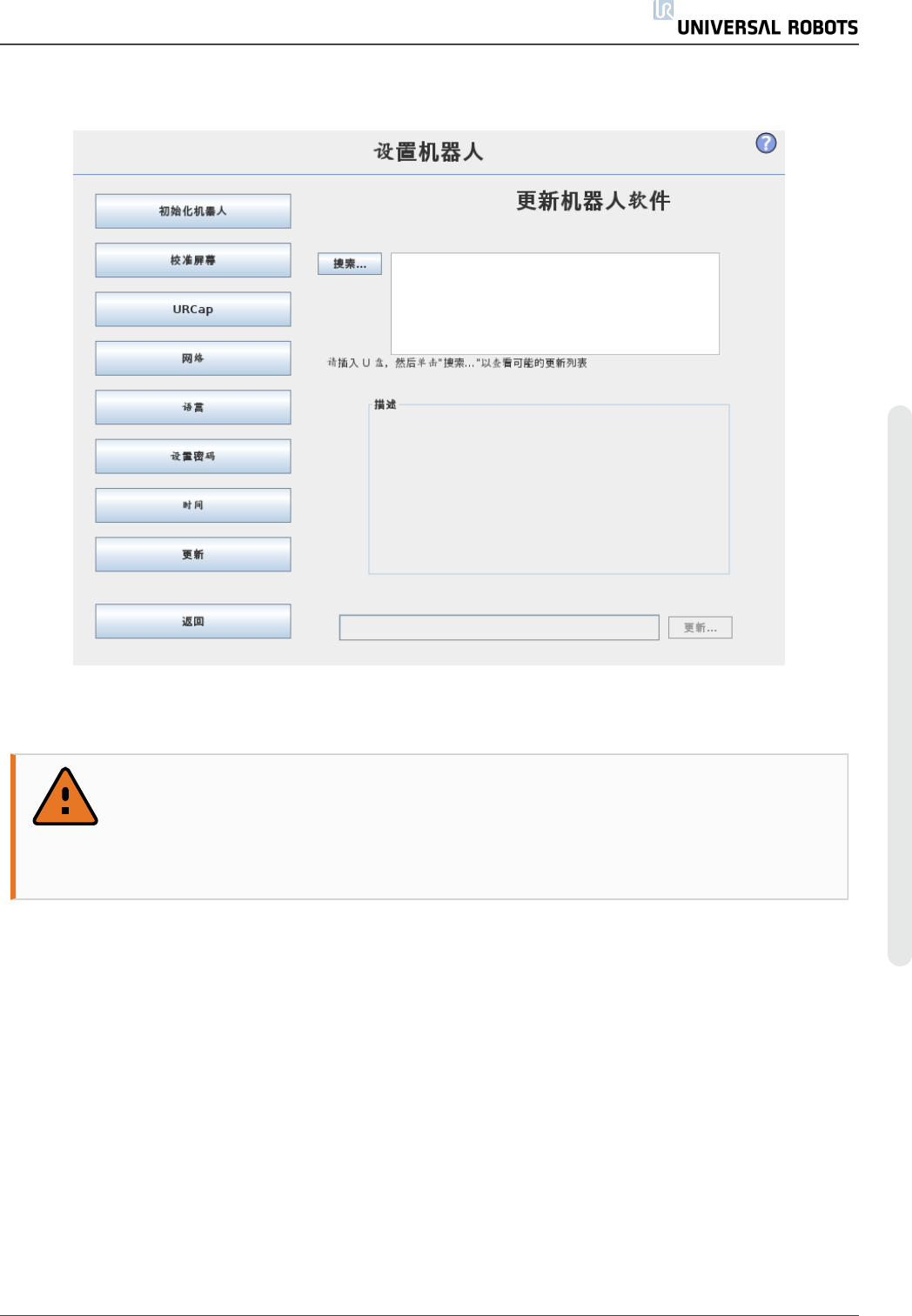
1.26.2. 更新机器人
软件更新可以从 USB 闪存安装。插入 U 盘并点击搜索可列出其中的内容。要进行更新,请选
择一个文件,点击更新,然后按屏幕说明操作。
警告
软件升级后务必检测你的程序。升级操作会改变程序中的轨迹。点击 GUI 右边
角的“?”按钮可查看更新的软件规范。软件规格不变,可以在原来的手册中查
看。
用 户 手 册 195 UR5
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。