99312_UR5_User_Manual_zh_E67ON_Global.pdf - 第146页
wp 2 wp 3 wp 4 15. 6 : 对 该 平 面 特 征 应 用 偏 移 Ro bot P rog ram Mo veJ S1 if ( dig ita l_in put [0] ) t hen P1 _va r = P 1 el se P1 _va r = P 2 Mo veL # F eat ure : P1 _va r wp 1 wp 2 wp 3 wp 4 15. 7 : 从 一 个 平 面 特 征 切 换 到 另 …
15.4:
通过更改特征手动更新与某个平面特征相关的四个路点的简单程序
应用需要将程序重新用于多个机器人安装,其中只有桌子的位置略有不同。相对于桌子的移
动相同。通过在安装设置中将桌子的位置定义为特征
P1
,只要用桌子的实际位置更新安装设
置,就可以很容易地将包含相对于平面配置的
MoveL
命令的程序应用到其他机器人上。
该概念适用于应用中的一些特征,以实现可以在许多机器人上解决相同任务的灵活程序,即
使工作空间中因安装而有所不同。
示 例 :动 态 地 更 新 特 征 位 姿
考虑一个类似的应用,其中机器人必须在桌子上以特定的模式移动来完成特定任务( 请参阅
15.5) 。
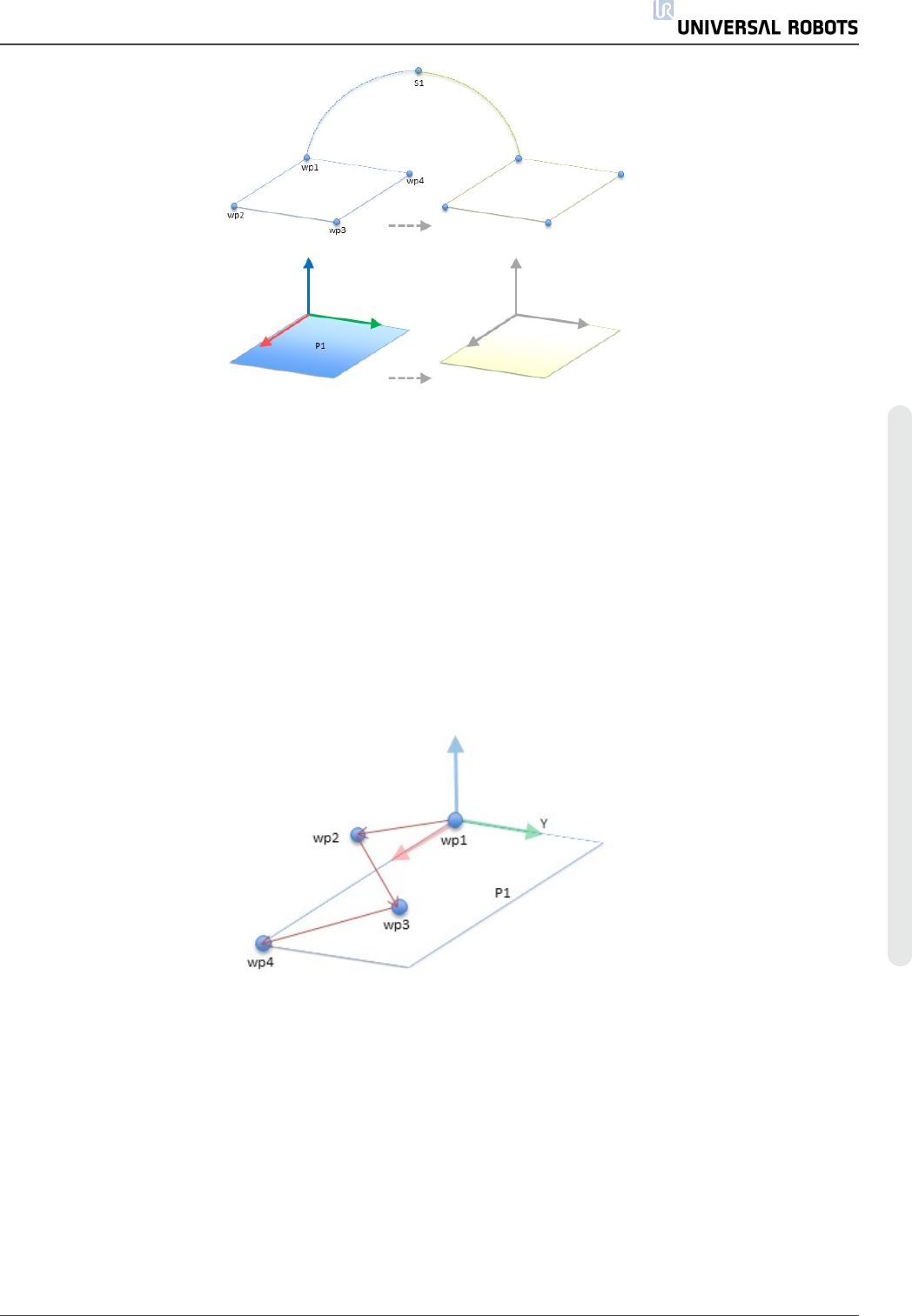
15.5:
具有相对于某个平面特征的四个路点的 MoveL 命令
Robot Program
MoveJ
wp1
y = 0.01
o = p[0,y,0,0,0,0]
P1_var = pose_trans(P1_var, o)
MoveL # Feature: P1_var
wp1
用 户 手 册 135 UR5
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
wp2
wp3
wp4
15.6:
对该平面特征应用偏移
Robot Program
MoveJ
S1
if (digital_input[0]) then
P1_var = P1
else
P1_var = P2
MoveL # Feature: P1_var
wp1
wp2
wp3
wp4
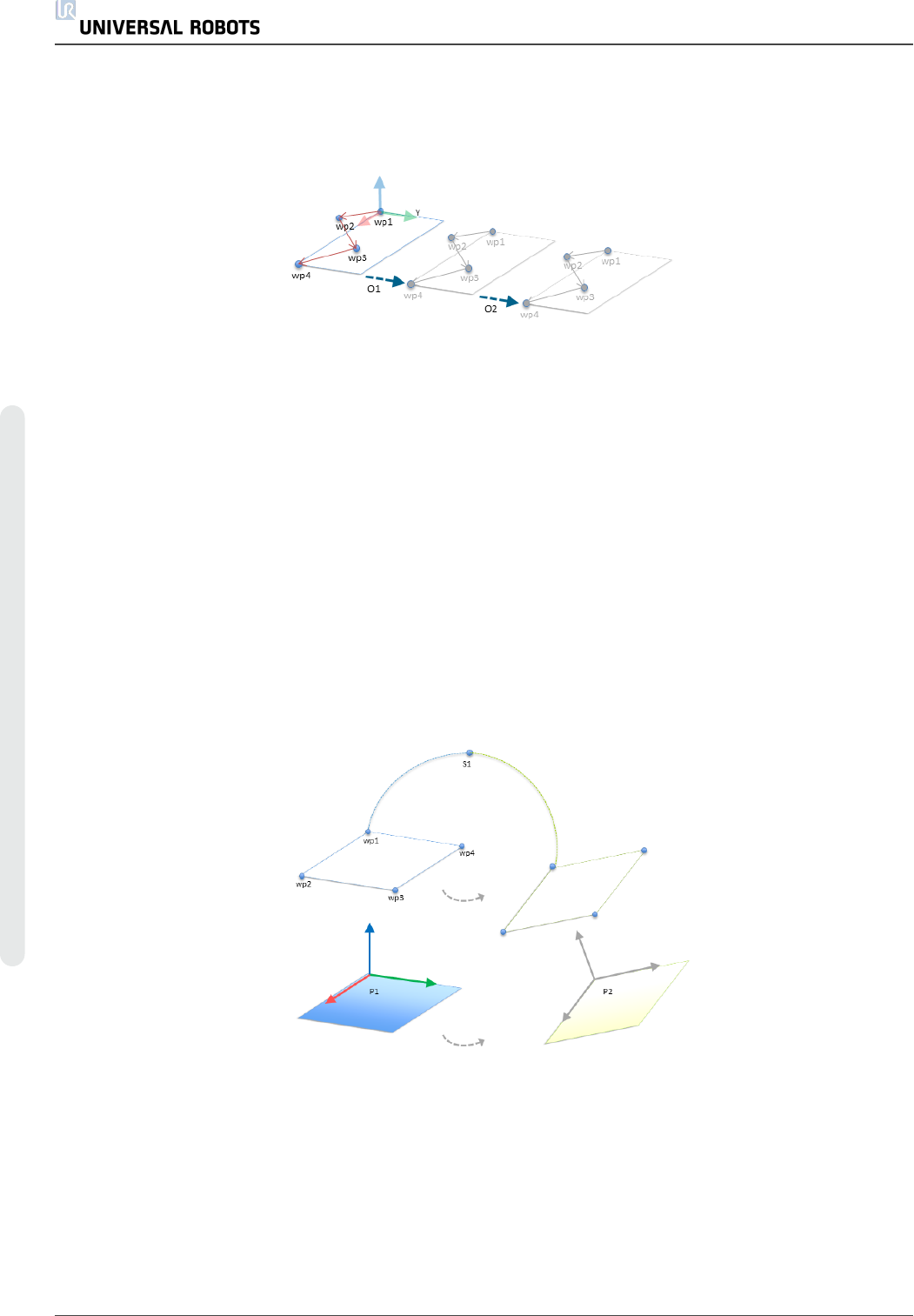
15.7:
从一个平面特征切换到另一个平面特征
相对于
P1
的移动重复了许多次,每次偏移量为
o
。在本例中,偏移在 Y 方向上设置为 10 cm
( 参见图 15.6,偏移量为
O1
和
O2
) 。这通过使用
pose_add()
或
pose_trans()
脚本函数操作变量
来实现。程序在运行时可以切换到不同的特征,而不是添加偏移量。如以下示例所示( 参见图
15.7) ,
MoveL
命令
P1_var
的参考特征可以在两个平面
P1
和
P2
之间切换。
UR5 136 用 户 手 册
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。

1.24.13. 输送机跟踪设置
“输送机跟踪设置”可以对最多 2 台输送机的移动进行配置。输送机跟踪设置提供配置机器人
的选项,使其与绝对或增量式编码器以及线性或圆形输送机一起工作。
输 送 机 参 数
增量式
编码器可以连接到数字输入 0~3。编码器可以连接到数字输入 8 ~ 11。数字信号的解码
以 40kHz 的频率运行。利用正交编码器( 需要两个输入) ,机器人可以确定输送机的速度和
方向。如果输送机的方向恒定,可利用单个输入端检测用于确定输送机速度的
上升沿
、
下
降沿
或
上升和下降沿
。
绝对式
编码器可以通过 MODBUS 信号连接。这需要预先配置一个数字 MODBUS 输出寄存器
( 1.24.11. 安装设置 → MODBUS 客户端 I/O 设置 在本页125一节) 。
跟 踪 参 数
线性输送机
选择线性输送机时,必须在安装设置的特征部分配置一个直线特征来确定输送机的方向。
使线性特征与输送机的方向平行可确保精度,定义线性特征的两点之间距离要长。在示教
两点时将工具牢牢地顶着输送机的侧面放置来配置直线特征。如果直线特征的方向与输
送机的移动方向相反,请使用反向按钮。每米信号数量字段显示当输送机移动一米时编码
器生成的信号数量。
圆形输送机
在跟踪圆形输送机时,必须定义输送机中心点。
1. 在安装设置的特征部分中定义中心点。每转信号数量值必须是当输送机旋转一整圈
时编码器生成的信号数量。
2. 选中工具随输送机旋转复选框可使工具跟踪输送机的旋转方向。
1.24.14. 安全模式之间的平顺过渡
在事件过程中,当在安全模式之间切换时( 即缩减模式输入、缩减模式触发平面、防护停止和
3 档位使动装置) ,机器人手臂打算使用 0.4 秒来创建“软”过渡。现有应用程序具有与“硬”设置
相对应的不变行为。新安装文件默认为“软”设置。
调 整 加 速 /减 速 设 置
• 点击安装选项卡。
• 在左侧边栏菜单中选择平顺过渡。
• 选择硬表示更高的加速/减速,选择软表示更平顺的默认过度设置。
用 户 手 册 137 UR5
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。