99312_UR5_User_Manual_zh_E67ON_Global.pdf - 第132页
• 数 字 标 准 通 用 、 可 配 置 和 工 具 • 模 拟 标 准 通 用 和 工 具 • MO D BU S • 通 用 寄 存 器 ( 布 尔 、 整 数 和 浮 点 ) 可 通 过 现 场 总 线 ( 如 P rofi ne t 和 以 太 网 /IP) 访 问 通 用 寄 存 器 。 I / O 信 号 类 型 要 限 制 在 输 入 和 输 出 部 分 中 列 出 的 信 号 数 量 , 请 使 用 屏 幕 顶 部 的…
警告
如果没有正确安装机器人手臂,则可能导致频繁的保护性停止,并且/或者按自
由驱动按钮时,机器人手臂会移动。
如果机器手臂安装在平稳的台面或地面上,无需对此屏幕进行任何更改。但是,如果机器人手
臂采用吊顶式安装、壁挂式安装或呈一定角度安装,则需使用按钮对其进行调整。
屏幕右侧的按钮可用于设置机器人手臂的安装角度。右上角的三个按钮可将角度设置为吊顶
(180
∘
)、墙壁 (90
∘
)、地面 (0
∘
)。倾斜按钮可设置任意角度。
屏幕底部的按钮用于旋转机器手臂的安装角度,以与实际安装角度保持一致。
警告
使用正确的安装设置。用程序保存并加载安装文件。
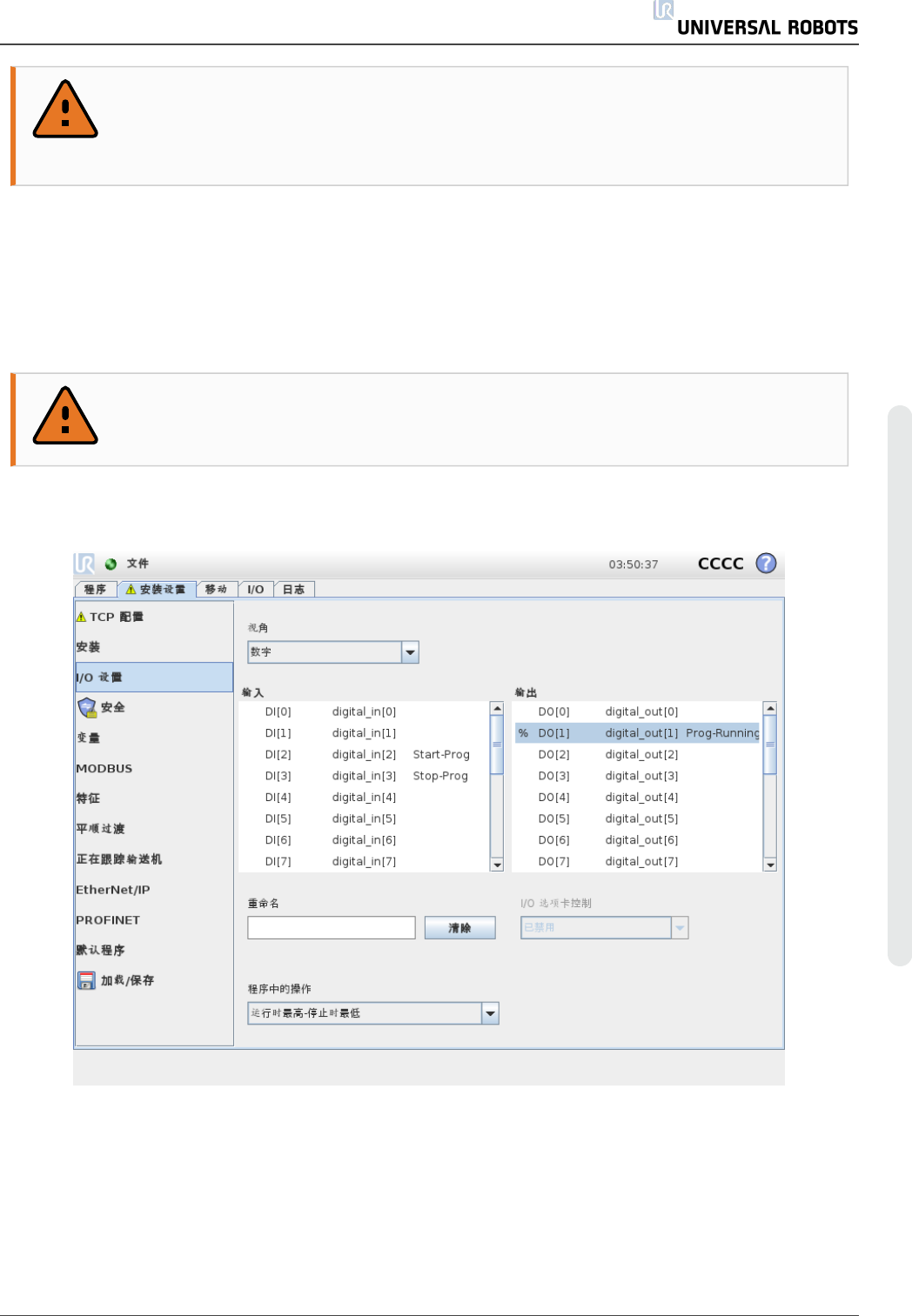
1.24.8. 安装设置 → I/O 设置
在“I/O 设置”屏幕上,用户可以使用 I/O 选项卡控件定义 I/O 信号并配置动作。
输入和输出部分列出了 I/O 信号的类型,例如:
用 户 手 册 121 UR5
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
• 数字标准通用、可配置和工具
• 模拟标准通用和工具
• MODBUS
• 通用寄存器( 布尔、整数和浮点) 可通过现场总线( 如 Profinet 和以太网/IP) 访问通用寄存
器。
I/O 信 号 类型
要限制在输入和输出部分中列出的信号数量,请使用屏幕顶部的视图下拉菜单根据信号类型
更改显示的内容。
指 定 用 户 定 义 的 名 称
要轻松记住信号在与机器人一起工作时所做的工作,用户可以将名称与输入和输出信号相关
联。
1. 选择所需的信号
2. 点击屏幕下方的文本字段即可设置名称。
3. 要将名称重置为默认名称,请点按清除。
必须为通用寄存器指定一个用户定义的名称,使其在程序中可用( 即,对于 Wait 命令或 If 命令
的条件表达式) Wait 和 If 命令分别在1.25.10. 命令:等待 在本页162和1.25.17. 命令:If在本页168
中进行了介绍。命名的通用寄存器可在表达式编辑器屏幕的输入或输出选择器中找到。
I/O 操 作 和 I/O 选项 卡 控 件
输入和输出操作
物理和现场总线数字 I/O 可用于触发操作或者对程序状态作出反应。可用的输入动作:
• 启动:在上升沿启动或恢复当前程序。
• 停止:在上升沿停止当前程序。
• 暂停:在上升沿暂停当前程序。
• 自由驱动:当输入为高电平时,机器人处于自由驱动状态( 类似于“自由驱动”按钮) 。
如果程序正在运行或其他条件不允许自由驱动,则忽略输入。
警告
如果在使用“启动”输入动作时机器人停止,则机器人会在执行该程序之前
缓慢移动到程序的第一个路点。如果在使用“开始”输入操作时机器人暂停,
则机器人会在恢复该程序之前缓慢移动到暂停的位置。
可用输出动作:
UR5 122 用 户 手 册
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
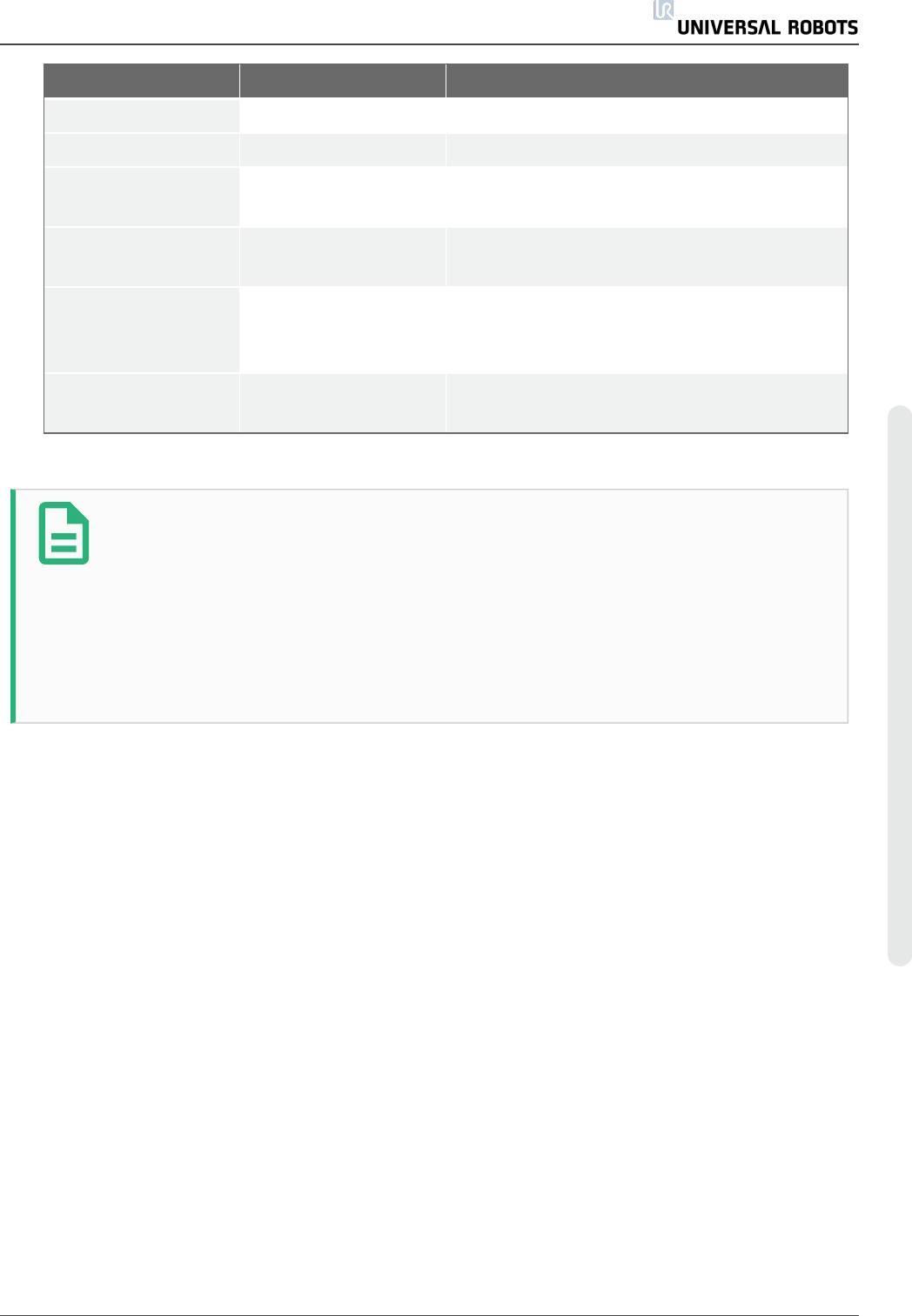
动作 输出状态 程序状态
未运行时为低电平 低电平 停止或暂停
未运行时为高电平 高电平 停止或暂停
运行时为高电平,
停止时为低电平
低电平
高电平
运行
停止或暂停
计划外停止时为低
电平
低电平 程序计划外终止
计划外停止时为低
电平,否则为高电
平
低电平
高电平
程序计划外终止
运行、停止或暂停
连续脉冲 在高电平和低电平之
间交替
运行( 暂停或停止程序以保持脉冲状态)
提示
如果发生以下任何情况,程序将计划外终止:
• 保护性停止
• 故障
• 违例
• 运行时异常
I/O 选项卡控制
指定输出是由“I/O" 选项卡控制( 由编程员控制或由操作员和编程员共同控制) ,还是由机
器人程序控制。
1.24.9. 安装设置 → 安全
请参阅1.21. 安全配置 在本页81一章。
用 户 手 册 123 UR5
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。