99312_UR5_User_Manual_zh_E67ON_Global.pdf - 第86页
TU V N O RD C e rti fi ed SF Safety Func ti on Li m i ts or U SER c onf i gurati o n or F a c tory Setti ng Stop C ate gory per IEC 602 04-1 IEC 61800 -5-2 Stop: power to fi na l s w i tc hi n g dev i c e s retai n ed fo…
TUV
NORD
Certified
SF
Safety
Function
Description
What is
controlled?
Mode
Selection
External
Mode
Switch
using dual
Inputs (1
through 4)
and
internal
logic
When the external connections are Low, Operation Mode
(running) is in effect. When High, the mode is programming or
teach. Must be used with an Enabling Device as a safety input.
When in Teach/Program (Mode switch inputs high), enabling
device is required for operation. When in teach/program,
initially the TCP speed will be limited to 250mm/s. The speed
can manually be increased by using the pendant user interface
“speed-slider”, but upon activation of the enabling device, the
speed limitation will reset to 250mm/s.
Robot
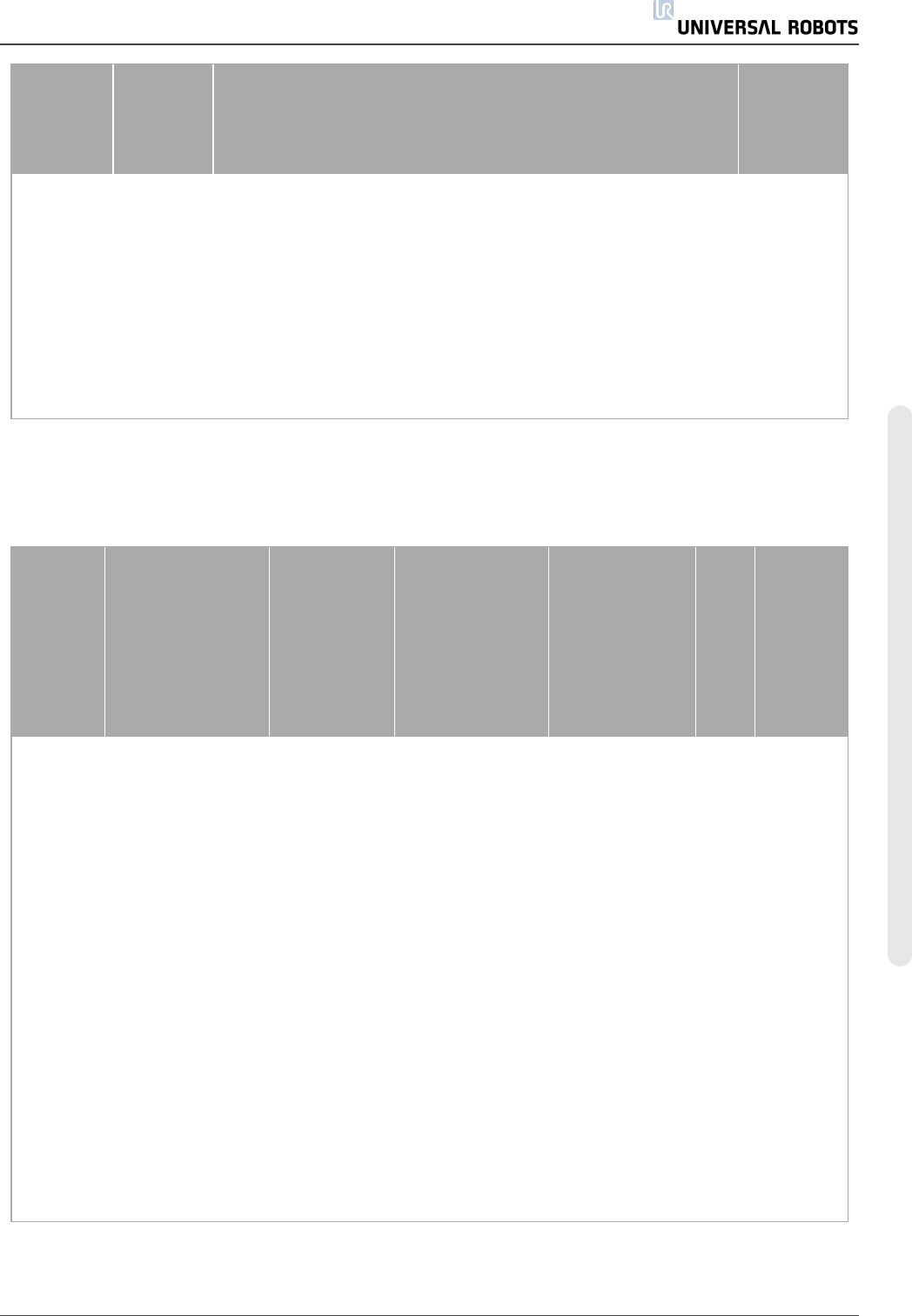
1.20. Table 2: Compliance and ISO 13849-1
Functional Safety Information
TUV
NORD
Certified
SF
Safety Function
Limits or
USER
configuration
or Factory
Setting
Stop Category
per IEC 60204-1
IEC 61800-5-2
Stop: power to
final switching
devices
retained for
Category 2
stop
PLd
Cat
PFHd
UR
3/5/10
SF0
Emergency Stop
There are two
separate
Emergency Stop
safety functions:
SF0 and SF1
No
Cat 1 Stop
524ms time-
delay before Cat
0 stop is initiated
NA 3 4.38E-8
SF1
Emergency Stop
There are two
separate safety
functions: SF0
and SF1
No
Cat 1 Stop when
at SS1 standstill,
Cat 0 stop
initiated
SS1 when at
SS1 standstill,
Cat 0 stop
initiated
2 3.16E-07
SF2
Safeguard stop
(Protective Stop)
No Cat 2 SS2 2 3.15E-07
SF3
Joint Position
Limit (soft axis
limiting)
Limits Cat 0 NA 2 3.15E-07
SF4 Joint Speed Limit Limits Cat 0 NA 2 3.15E-07
用 户 手 册 75 UR5
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。

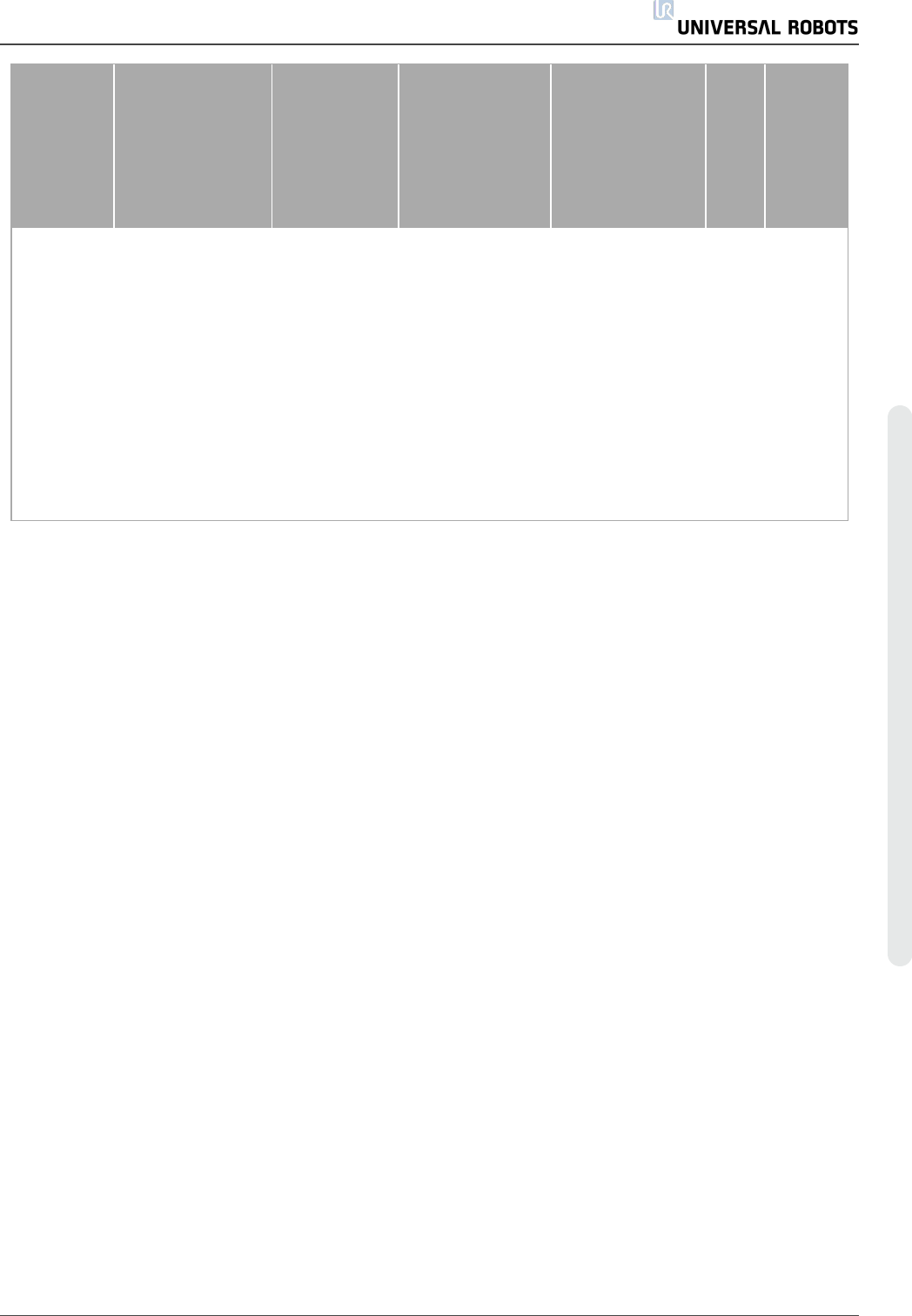
TUV
NORD
Certified
SF
Safety Function
Limits or
USER
configuration
or Factory
Setting
Stop Category
per IEC 60204-1
IEC 61800-5-2
Stop: power to
final switching
devices
retained for
Category 2
stop
PLd
Cat
PFHd
UR
3/5/10
SF5
Joint Torque Limit
internal factory
setting
factory
setting
Cat 0 NA 2 3.15E-07
SF6 TCP Pose Limit Limits Cat 0 NA 2 3.15E-07
SF7 TCP Speed Limit Limits Cat 0 NA 2 3.15E-07
TUV
NORD
Certified
SF
Safety Function
Limits or
USER
configuration
or Factory
Setting
Stop Category
per IEC 60204-1
IEC 61800-5-2
Stop: power to
final switching
devices
retained for
Category 2 stop
PLd
Cat
PFHd
UR
3/5/10
SF8 TCP Force Limit Limits Cat 0 NA 2
3.15E-
07
SF9 Momentum Limit Limits Cat 0 NA 2
3.15E-
07
SF10 Power Limit Limits Cat 0 NA 2
3.15E-
07
SF11
UR RINPUTobot
Estop Output
Output & I/O
Configuration
See Estop SF1 See Estop SF1 2
4.41E-
08
SF12
UR Robot Moving:
Digital Output
Output & I/O
Configuration
Cat 0 NA 2
3.15E-
07
SF13
UR Robot Not
stopping:
Digital Output
Output & I/O
Configuration
Cat 0 NA 2
3.15E-
07
SF14
UR Robot
Reduced Mode:
Digital Output
Output & I/O
Configuration
Cat 0 if fault
detected
NA 2
3.15E-
07
SF15
UR Robot Not
Reduced Mode:
Digital Output
Output & I/O
Configuration
Cat 0 (immediate
stop)
NA 2
3.15E-
07
UR5 76 用 户 手 册
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
TUV
NORD
Certified
SF
Safety Function
Limits or
USER
configuration
or Factory
Setting
Stop Category
per IEC 60204-
1
IEC 61800-5-2
Stop: power to
final switching
devices
retained for
Category 2 stop
PLd
Cat
PFHd
UR
3/5/10
Robot
Reduced
Mode
Reduced Mode
INPUT
Input & I/O
Configuration
Cat2 SS2 2
3.15E-
07
Safeguard
Reset
Safeguard Reset
INPUT
Input & I/O
Configuration
Cat2 SS2 2
3.15E-
07
Enabling
Device
3 Position
Enabling Device
INPUT
Input & I/O
Configuration
Cat2 SS2 2
3.15E-
07
Mode
Selection
Mode switch
INPUT
Input & I/O
Configuration
Cat2 SS2 2
3.15E-
07
用 户 手 册 77 UR5
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。