99312_UR5_User_Manual_zh_E67ON_Global.pdf - 第106页
值 集 。 如 果 机 器 人 手 臂 仍 然 违 反 任 何 缩 减 模 式 限 值 , 将 执 行 0 类停 机 。 向 正 常 模 式 过 渡 的 方 式 与 此 相 同 。 请 注 意 , 安 全 平 面 也 可 能 导 致 向 缩 减 模 式 过 渡 ( 请 参 阅 安 全 板 配 置 在 本 页 90 了 解 更 多 详 细 信 息 ) 。 防 护 重 置 如 果 在 安 全 I/O 中 连 接 了 防 护 停 止 , 则 …
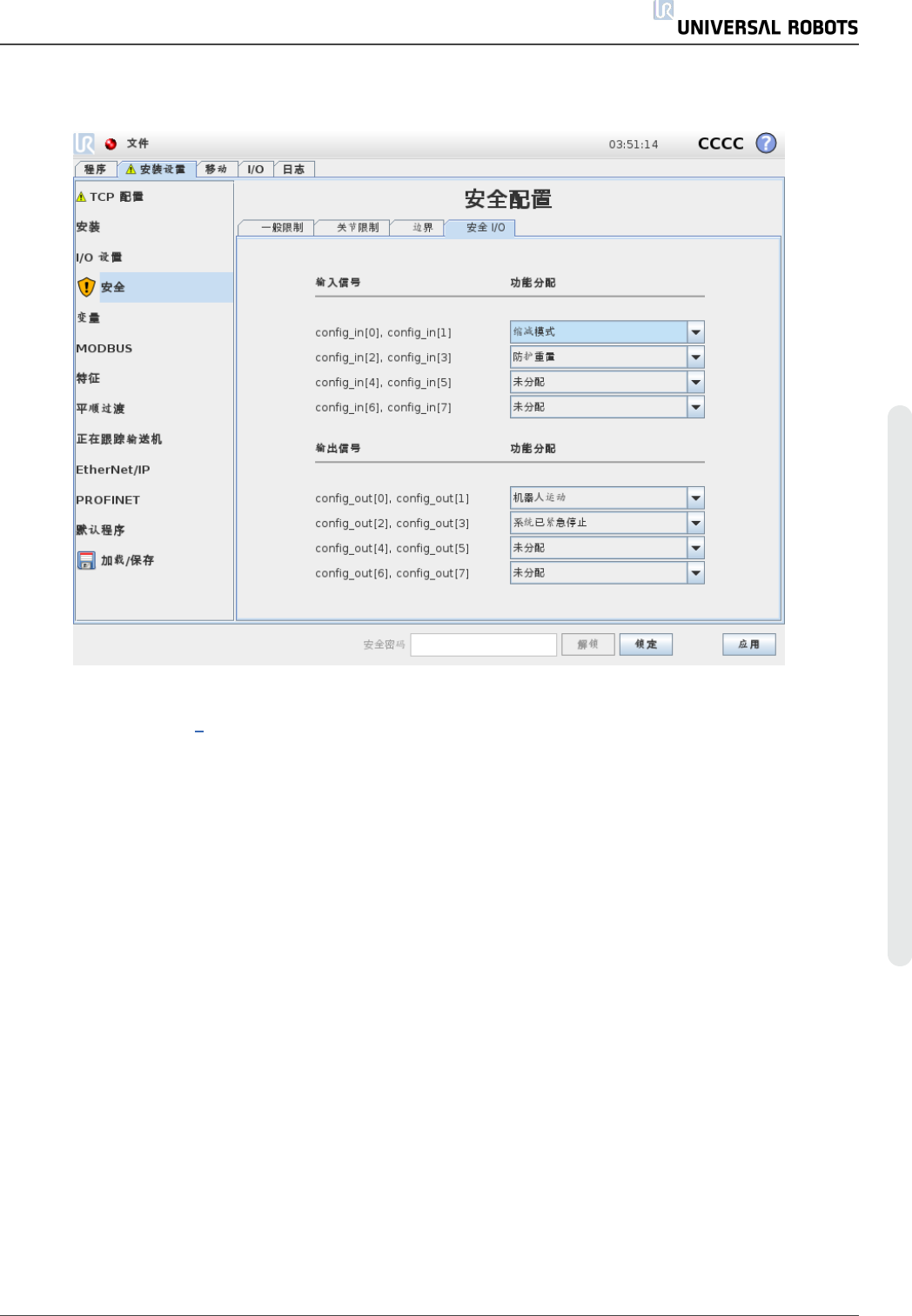
1.21.13. 安全 I/O
此屏幕用于定义可配置输入和输出 (I/O) 的
安全功能
。I/O 被分为输入和输出,并成对出现以便
为每个功能提供 3 类
1
PLd I/O。
每项
安全功能
只能控制一对 I/O。尝试再次选择相同的安全功能会将其从之前定义的第一对
I/O 中移除。输入信号有 5 种
安全功能
,输出信号也有 5 种。
注意:将安全功能应用于一组引脚将覆盖在“I/O 设置”( 请参阅1.24.8. 安装设置 → I/O 设置 在本
页121) 中为引脚指定的任何 I/O 动作。
输 入 信 号
对于输入信号,可以选择以下
安全功能
:系统紧急停止, 缩减模式, 防护重置, 3 档位使动装置
and 操作模式。
系统紧急停止
配置后,除了示教盒上的紧急停止按钮外,又多了一个紧急停止按钮。此功能需要使用符合
ISO 13850 的设备。
缩减模式
所有安全限值都有两种可以应用的模式:
正常
模式( 指定默认安全配置) 和
缩减
模式( 请参阅
1.21.6. 安全模式 在本页84了解更多详细信息) 。选择此项输入安全功能时,向输入端提供的低
电平信号将导致安全系统过渡到
缩减
模式。如有必要,机器人手臂将缩减,以满足
缩减
模式限
用 户 手 册 95 UR5
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
值集。如果机器人手臂仍然违反任何
缩减
模式限值,将执行 0 类停机。向
正常
模式过渡的方式
与此相同。请注意,安全平面也可能导致向
缩减
模式过渡( 请参阅安全板配置 在本页90了解更
多详细信息) 。
防护重置
如果在安全 I/O 中连接了防护停止,则此输入用于确保防护停止状态持续,直到触发重置为
止。在防护停止状态下,机器人手臂不会移动。
警告
默认情况下,“防护重置”功能为输入引脚 0 和 1 配置。将其禁用意味着在“防护
停止”输入变成高电平时,机器人手臂将不再是“防护停止”状态。换句话说,无
需“防护重置”,“防护停止”输入 SI0 和 SI1( 请参阅《硬件安装手册》) 完全确定防
护停止状态是否激活。
3 档位使动装置 and 操作模式
允许在机器人的设置和编程过程中选择使用 3 档位设备作为一个附加防护措施。配置3 档位
使动装置输入之后,机器人将处于“运行模式”或“编程模式”。一个图标将出现在右上角以显示
当前的操作模式:
•
运行模式
:机器人只能执行预定义的任务。移动选项卡和自由驱动模式不可用。
•
编程模式
:解除了
运行模式
下存在的限制。只要3 档位使动装置输入为低电平,机器人
就会处于“防护停止”状态,并且速度滑块会设置为初始值,该初始值对应于正常模式下
的 250 mm/s。
但是,在缩减模式下,缩放比例仍与正常模式相同,因此速度滑块并不总是达到 250
mm/s;相反,它可以缩放到正常模式的较低百分比。
速度滑块可以逐渐增加以达到更高的速度。每当3 档位使动装置输入信号由高电平变
成低电平时,速度滑块会被重置为低值。
配置操作模式选择有两种方法:
1. 要使用外部模式选择设备选择操作模式,请配置操作模式输入。一旦配置了 3 档位使动
装置输入,操作模式输入的配置选项就会出现在下拉菜单中。当操作模式输入信号为低
电平时,机器人将处于“运行模式”,当输入信号为高电平时,机器人将处于“编程模式”。
2. 要从 Polyscope 选择操作模式,只需配置3 档位使动装置输入并将其应用于安全配置。
在这种情况下,默认模式为
运行
。要切换到
编程模式
,应在“欢迎”屏幕上选择“为机器人
编程”按钮。要切换回
运行模式
,只需退出“为机器人编程”屏幕。
UR5 96 用 户 手 册
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
提示
• 在启用了 3 档位使动装置的安全 I/O 配置得到确认后,将自动显示“欢迎”
屏幕。当操作模式从
编程
变为
运行
时,也会自动显示“欢迎”屏幕。
• 物理模式选择器( 如果使用) 必须完全符合 ISO 10218-1:第 5.7.1 条的选
择。
• 3 档位开关及其特性、性能特点及操作必须完全符合 ISO 10218-1:5.8.3
的启用装置。
输 出 信 号
对于输出信号,可以应用以下
安全功能
。触发高信号的状态结束时,所有信号恢复成低信号:
System Emergency Stop
只有当安全系统被“机器人紧急停止”输入或“紧急停止”按钮触发到“紧急停止”状态时,才会发
出低电平信号。为避免死锁,如果“系统紧急停止”输入触发了“紧急停止”状态,则不会发出低
电平信号。
提示
通过“系统紧急停止”输出从机器人获得“紧急停止”状态的外部机械必须符合
ISO 13850。这在“机器人紧急停止”输入连接到外部紧急停止装置的设置中尤为
必要。在这种情况下,当外部紧急停止装置被释放时,“系统紧急停止”输出将变
成高电平。这意味着外部机械的紧急停止状态将被重置,而不需要来自机器人
操作员的手动操作。因此,为了符合安全标准,外部机械必须采取手动操作才
能恢复。
Robot Moving
只要机器人手臂在移动状态就给出弱信号。机器人手臂处于固定位置时,给出强信号。
Robot Not Stopping
当由于紧急停止或防护停止而使机器人停止或处于停止过程中时,信号为逻辑高电平。信号
为逻辑低电平。
Reduced Mode
当机器人手臂处于
缩减
模式或安全输入配置了Reduced Mode输入且当前信号为低电平时,
将发送低电平信号。否则信号为高信号。
Not Reduced Mode
这与上面定义的Reduced Mode相反。
用 户 手 册 97 UR5
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。