99312_UR5_User_Manual_zh_E67ON_Global.pdf - 第139页
1.2 4.12. 安 装 设 置 → 特 征 特 征 表 示 由 相 对 于 机 器 人 机 座 的 六 维 位 姿 ( 位 置 和 方 向 ) 定 义 的 对 象 。 您 可 以 命 名 特 征 以 供 将 来 参 考 。 机 器 人 程 序 的 某 些 子 部 分 包 括 相 对 于 机 器 人 手 臂 机 座 之 外 的 特 定 对 象 执 行 的 移 动 。 这 些 对 象 可 以 是 机 器 人 手 臂 周 围 的 桌 子 …
此菜单可用于更改信号的更新频率。更新频率是指向远程 MODBUS 设备发送请求来读取
或写入信号值的请求频率。当频率设置为 0 时,将使用
modbus_get_signal_status
、
modbus_
set_output_register
和
modbus_set_output_signal
脚本函数按需启动 modbus 请求。
从设备地址
此文本字段可用于为与特定信号对应的请求设置具体的从设备地址。该值必须在 0-255 范
围内( 包括 0 和 255) ,默认值为 255。若要更改此值,建议您首先查阅远程 MODBUS 设备
手册,验证从设备地址更改后的功能正常。
重新连接计数
TCP 连接被关闭并重新连接的次数。
连接状态
TCP 连接状态。
响应时间 [ms]
发送 modbus 请求和收到响应之间的时间 - 仅当通信处于激活状态时才更新。
Modbus 数据包错误
收到的包含错误的数据包数( 即长度无效、数据丢失、TCP 套接字错误) 。
超时
未得到响应的 modbus 请求数。
请求失败
由于插座状态无效而无法发送的数据包数。
实际频率
客户端( 主) 信号状态更新的平均频率。每次信号从服务器( 或从设备) 接收到响应时,重新
计算此值。
所有计数器最多可达 65535,然后回到 0。
UR5 128 用 户 手 册
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
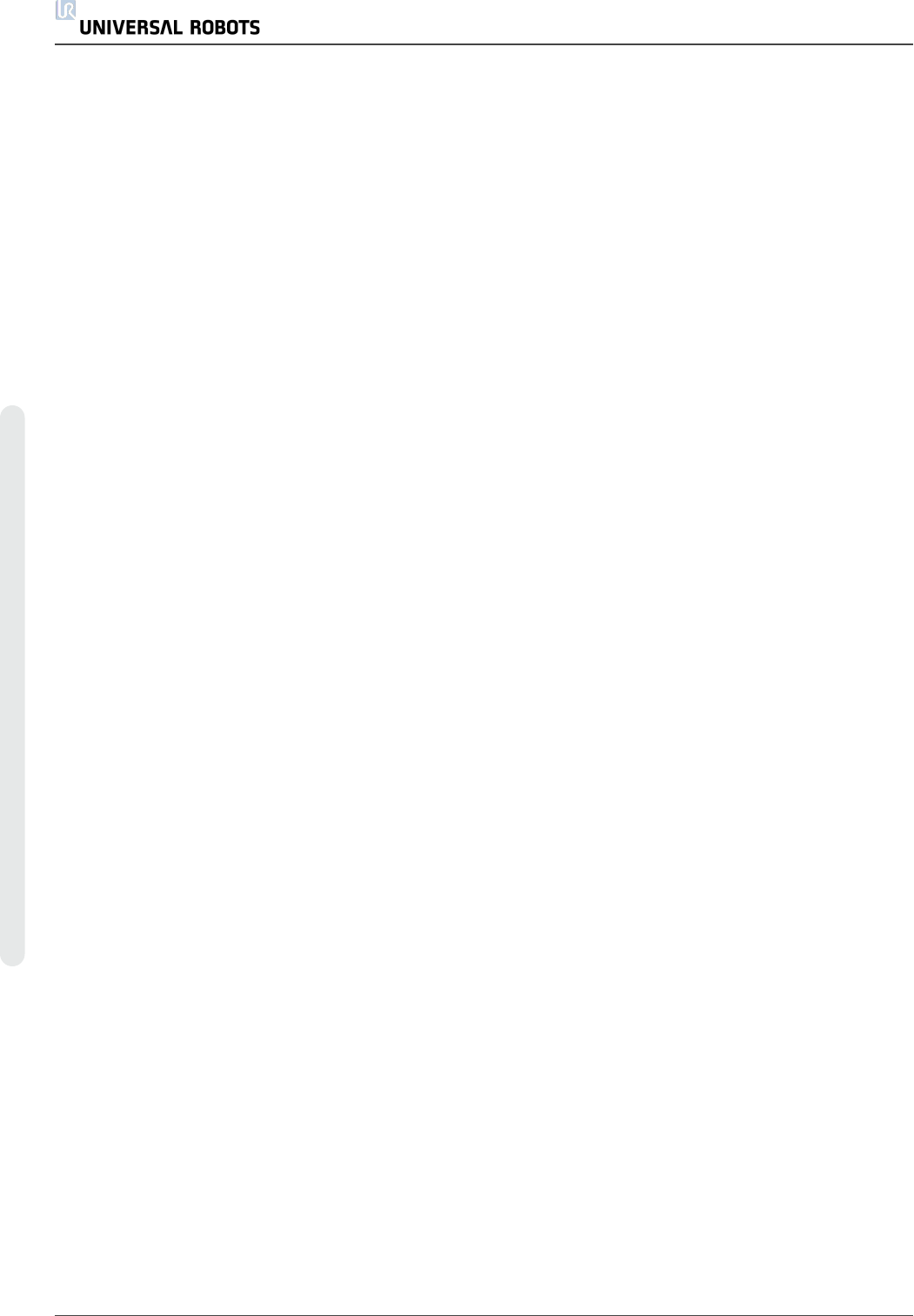
1.24.12. 安装设置 → 特征
特征表示由相对于机器人机座的六维位姿( 位置和方向) 定义的对象。您可以命名特征以供将
来参考。
机器人程序的某些子部分包括相对于机器人手臂机座之外的特定对象执行的移动。这些对象
可以是机器人手臂周围的桌子、其他机器、工件、观察系统、坯料或边界。
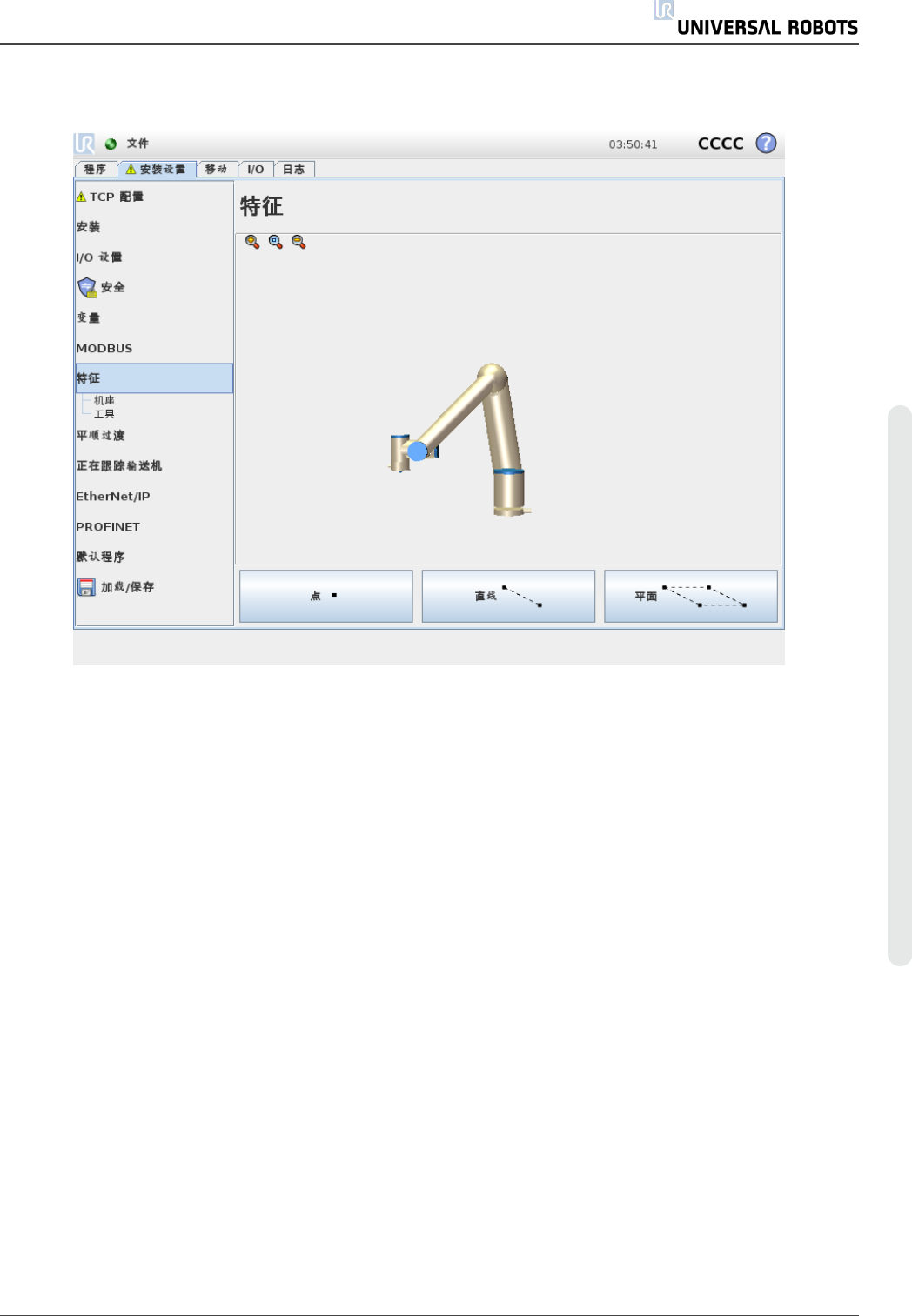
机器人包括以下两个预定义特征,其位姿由机器人手臂自身的配置定义:
• 机座特征,其原点位于机器人机座的中心( 参见图 15.1) 。
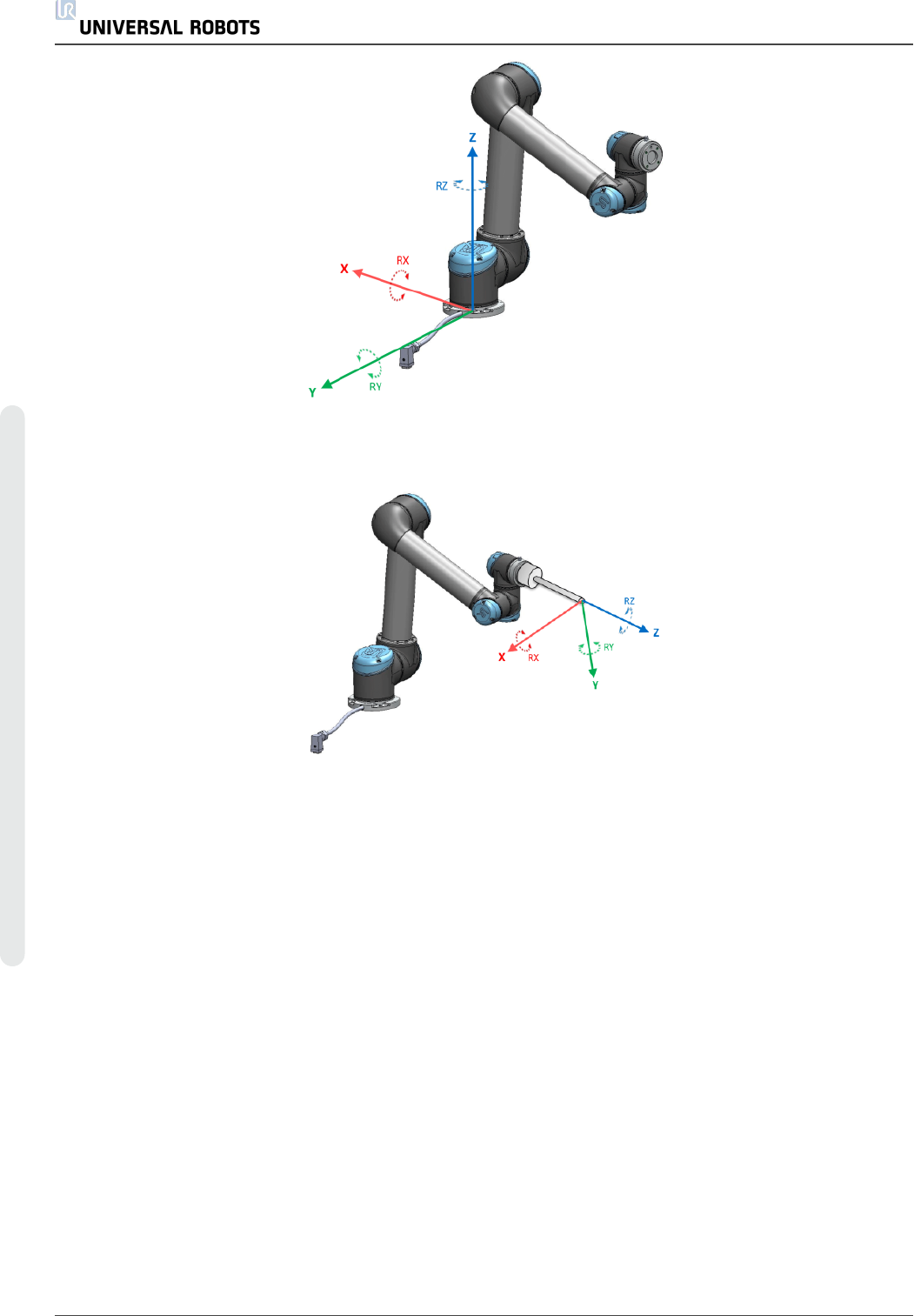
• 工具特征,其原点位于当前 TCP 的中心( 参见图 15.2) 。
用 户 手 册 129 UR5
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
15.1:
基本特征
15.2:
工具 (TCP) 特征
使用点特征、直线特征和/或平面特征定义特征位姿。
这些特征通过使用工作区中 TCP 的当前位姿的方法进行定位。因此,您可以使用自由驱动或
“缓慢移动”将机器人移动到所需位姿来示教特征位置。
特征的选择取决于所用对象的类型和精度要求。尽可能使用直线特征和平面特征,因为它们
基于更多的输入点。输入点越多意味着精度越高。
例如,您可以通过定义具有尽可能多的物理间隔的直线特征的两个点来准确定义线性输送机
的方向。您也可以使用点特征定义线性输送机,但必须将 TCP 指向输送机的移动方向。
使用更多的点来定义桌子的位姿意味着方向是基于单一 TCP 的位置而不是方向。单一 TCP
方向难以进行高精度配置。
有关添加特征的更多信息,请参阅以下小节:对页、在本页132和平面特征 在本页133。
使 用 特 征
您可以引用机器人程序的安装设置中定义的特征,将机器人移动( 如 MoveL 和 MoveP 命令)
与该特征关联起来( 请参阅1.25.4. 命令:移动 在本页149一节) 。
UR5 130 用 户 手 册
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。