99312_UR5_User_Manual_zh_E67ON_Global.pdf - 第61页
1.14. 制 动 时 间 和 制 动 距 离 下 面 关 于 停 止 时 间 和 距 离 的 信 息 适 用 于 0 类停 机 和 1 类 1 停 机 。 本 附 录 涵 盖 0 类停 机 的 相 关 信 息 。 有 关 1 类停 机 的 信 息 , 请 访 问 http://u ni ve rsa l-robo ts .co m/s up port/ 。 1.1 4.1. 0 类停 机 的 停 止 距 离 和 停 止 时 间 下 表…
UR5 50 用 户 手 册
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
1.14. 制动时间和制动距离
下面关于停止时间和距离的信息适用于 0 类停机和 1 类
1
停机。本附录涵盖 0 类停机的相关信
息。有关 1 类停机的信息,请访问 http://universal-robots.com/support/。
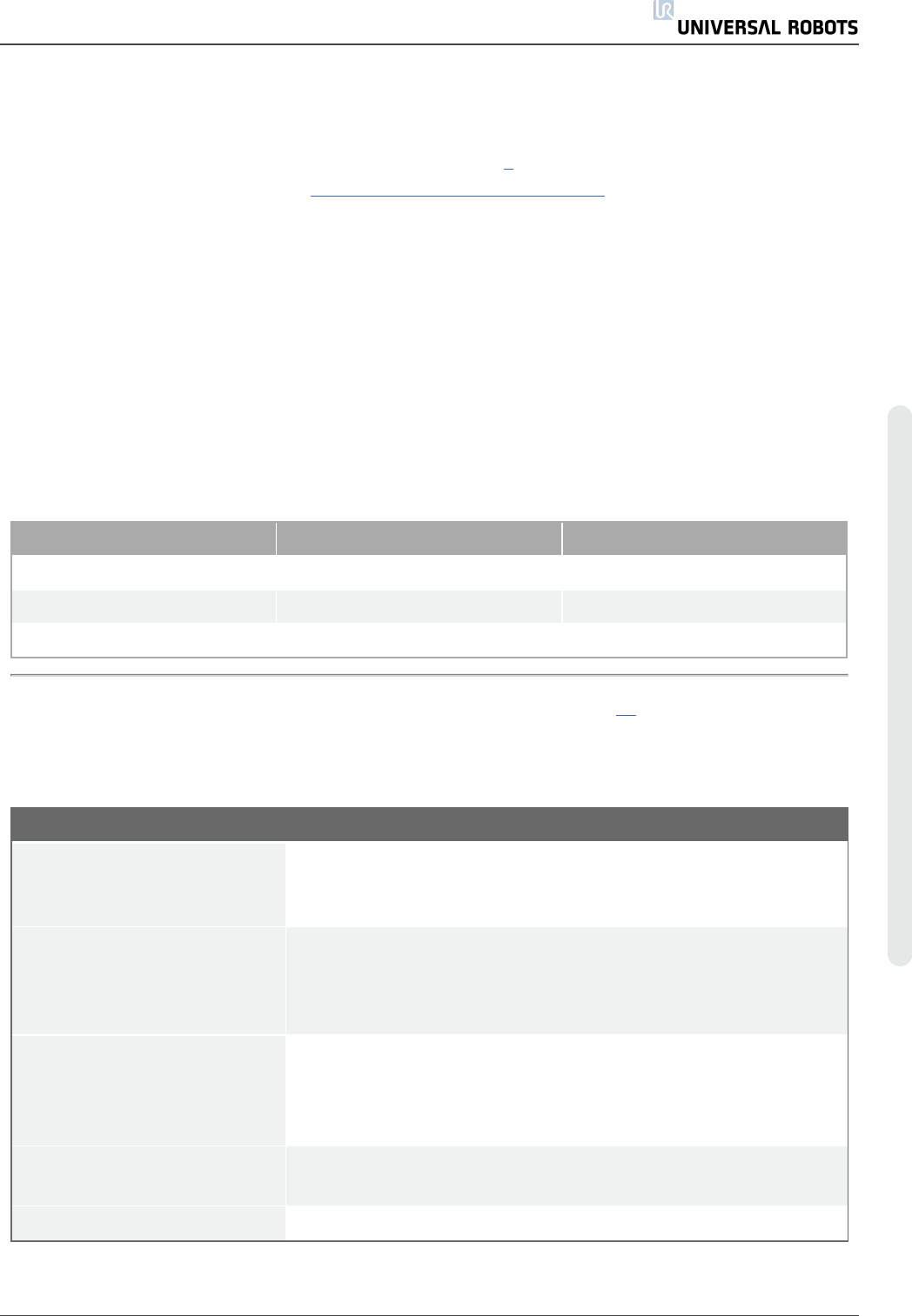
1.14.1. 0 类停机的停止距离和停止时间
下表中显示了触发 0 类停机时测得的停止距离和停止时间。这些测量结果对应于机器人的以
下配置:
• 伸展:100%( 机器人手臂完全水平伸展) 。
• 速度:100( 机器人的一般速度设为 100%,以 183 °/s 的关节速度进行移动) 。
• 有效载荷:连接到 TCP 的机器人可以处理的最大有效载荷 (5 kg )。
通过执行水平移动( 即旋转轴垂直于地面) 对关节 0 进行测试。在对关节 1 和关节 2 的测试过
程中,机器人遵循垂直轨迹,即旋转轴平行于地面,并在机器人向下移时停止。
停止距离 (rad) 停止时间 (ms)
关节 0( 底座) 0.31 244
关节 1( 肩部) 0.70 530
关节 2( 肘部) 0.22 164
1. 停机类别符合 IEC 60204-1,请参见术语表了解更多详细信息。↩
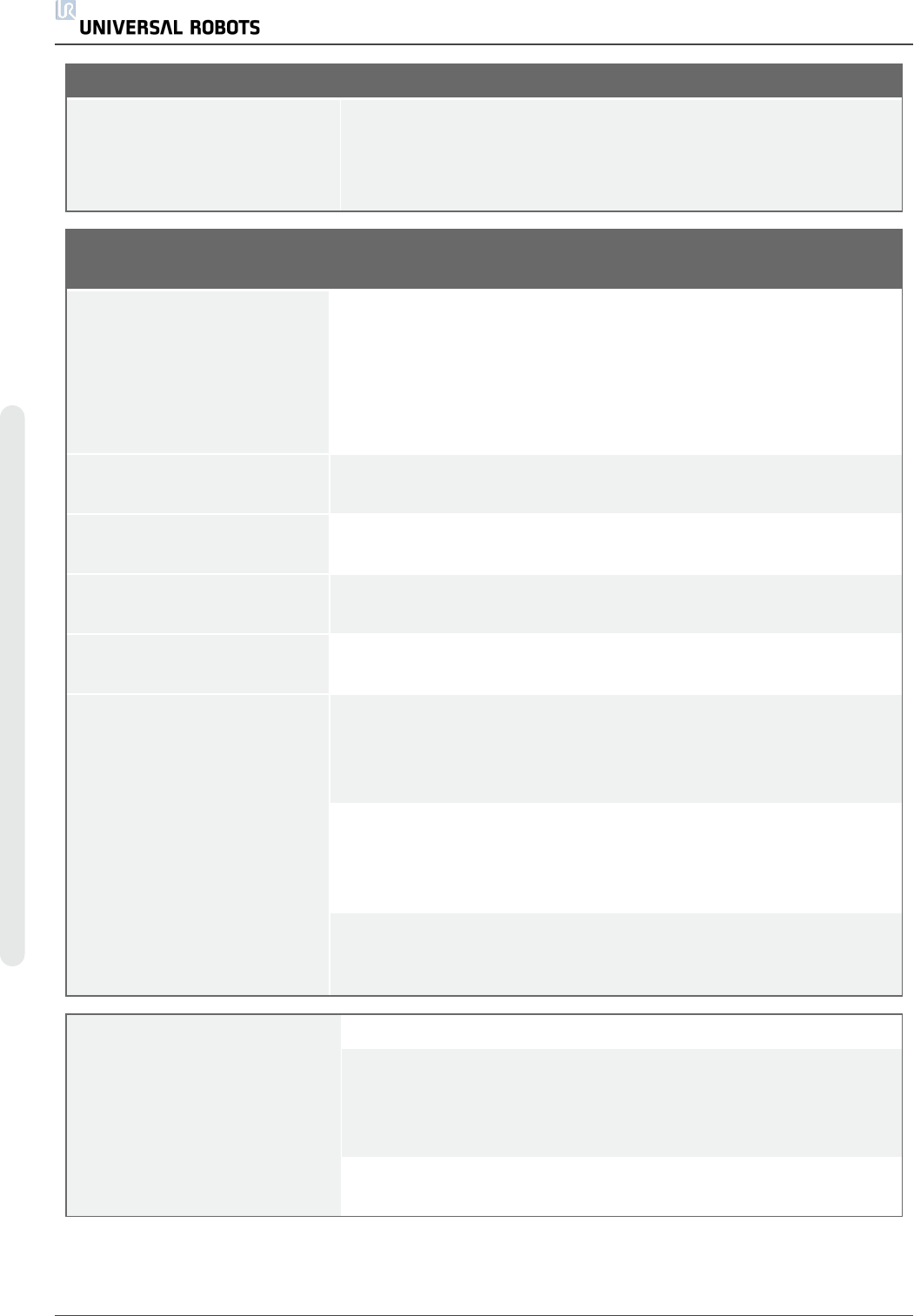
1.15. 声明和认证
EU Declaration of Incoporation in accordance with ISO/IEC 17050-1:2010
Manufacturer Universal Robots A/S
Energivej 25
DK-5260 Odense S Denmark
Person in the Community
Authorized to Compile the
Technical File
David Brandt
Technology Officer, Research and Development
Universal Robots A/S
Energivej 25, DK-5260 Odense S
Description and Identification of
the Partially-Completed
Machine(s)
Product and Function
Industrial robot (multi-axis manipulator with Control Box and Teach
Pendant). Function is determined by the completed machine (with
end-effector and intended use).
Model UR3, UR5, UR10 with CB3 control box (UR3/CB3, UR5/CB3,
UR10/CB3)
Serial Number Starting 20183000000 and higher --- Effective 1 January 2018
用 户 手 册 51 UR5
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
EU Declaration of Incoporation in accordance with ISO/IEC 17050-1:2010
Incorporation: Universal Robots (UR3, UR5, and UR10) shall only be put into
service upon being integrated into a final complete machine (robot
system, cell or application), which conforms with the provisions of
the Machinery Directive and other applicable Directives.
It is declared that the above products, for what is supplied, fulfil the following Directives as
Detailed Below:
IMachine Directive
2006/42/EC
The following essential requirements have been fulfilled: 1.1.2,
1.1.3, 1.1.5, 1.2.1, 1.2.4.3, 1.2.6, 1.3.4, 1.3.8.1, 1.5.1, 1.5.2, 1.5.6,
1.5.10, 1.6.3, 1.7.2, 1.7.4, 4.1.2.3
It is declared that the relevant technical documentation has been
compiled in accordance with Part B of Annex VII of the Machinery
Directive.
IILow-voltage Directive
2014/35/EU
Reference the LVD and the harmonized standards used below.
IIIEMC Directive 2014/30/EU Reference the EMC Directive and the harmonized standards used
below.
IVRoHS Directive
2011/65/EU
Reference the RoHS Directive 2011/65/EU.
V WEEE Directive
2012/19/EU.
Reference the WEEE Directive 2012/19/EU.
Reference to Harmonized
Standards Used:
(I) EN ISO 10218-1:2011 as applicable,(I) EN ISO 12100:2010
(I) EN ISO 13732-1:2008, (I) EN ISO 13849-1:2008 & 2015*
*Note: From the 2008 to the 2015 editions, there are no changes
relevant to our robots TUV Nord Certificate 4478014097602
(I) EN ISO 13849-2:2012, (I) EN ISO 13850:2015
(I) EN 1037:1995+A1:2008, (I) EN ISO 13850:2015
(II) EN 60320-1:2001/ A1:2007, (II) EN 60204-1:2006/ A1:2010
(II) EN 60529:1991/ A2:2013
(II) EN 60664-1:2007, (II) EN 60947-5-5:1997/ A11:2013
(II) EN 61000-6-2:2005, (II) EN 61140:2002/ A1:2006
(III)EN 61000-6-4:2007/ A1:2011, (III)EN 61131-2:2007
Reference to Other Technical
Standards and Specifications
Used:
(I) ISO/TS 15066 as applicable
(II) IEC 61784-3:2010 [SIL2]
ISO 14664-1:2015 Class 5 for control assembly with enclosure and
Class 5 for UR3, UR5 and UR10 manipulators
(II) IEC 60664-5:2007
(III) IEC 60068-2-27:2008, (III) IEC 60068-2-1:2007
(III) IEC 60068-2-2:2007, (III) IEC 61326-3-1:2008
UR5 52 用 户 手 册
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。