99312_UR5_User_Manual_zh_E67ON_Global.pdf - 第116页
U R5 1 06 用 户 手 册 版 权 所 有 © 2 009–2021U ni ver s al R obots A/S 。 保 留 所 有 权 利 。
在启动机器人手臂之前,务必验证激活的有效载荷和激活的安装设置与机器人手臂当前所处
的实际状态匹配。
初 始 化 机 器 手 臂
警告
启动机器手臂前,务必确认实际有效载荷和安装设置正确无误。如果设置错
误,机器人手臂和控制箱将无法正常工作,并会对周围的人或设备造成危险。
小心
如果机器人手臂碰到障碍物或桌子应格外小心,因为撞上障碍物会导致关节齿
轮箱损坏。
带绿色图标的大按钮用于对机器人手臂进行实际初始化。上面的文字,以及其执行的操作,都
会根据机器人手臂的当前状态变化。
• 控制器 PC 启动后,点击该按钮一次给机器人手臂通电。机器人手臂状态会显示通电,
随后显示空闲。请注意,如果遇到紧急停止,机器人手臂不会通电,因此该按钮被禁用。
• 如果机器人手臂状态为空闲,需再点按一次该按钮才能启动机器人手臂。此时,传感器
数据会根据配置的机器手臂安装数据进行核对。如果出现不匹配( 公差为 30
∘
) ,该按钮
会被禁用,按钮下方会显示错误消息。
通过安装验证后,点击该按钮将释放所有关节制动器,之后机器人手臂将准备好进行正
常操作。注意,释放制动器时,机器人会发出声音并移动少许位置。
• 如果启动后违反了某一安全限值,机器人手臂会在特殊的恢复模式下操作。在该模式
下,点击该按钮将切换至恢复移动屏幕,在该屏幕可以将机器人手臂移回安全限值内。
• 如果出现故障,可以使用该按钮重启控制器。
• 如果控制器当前未运行,点击该按钮启动控制器。
最后,带红色图标的较小按钮用于关闭机器人手臂。
用 户 手 册 105 UR5
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
UR5 106 用 户 手 册
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
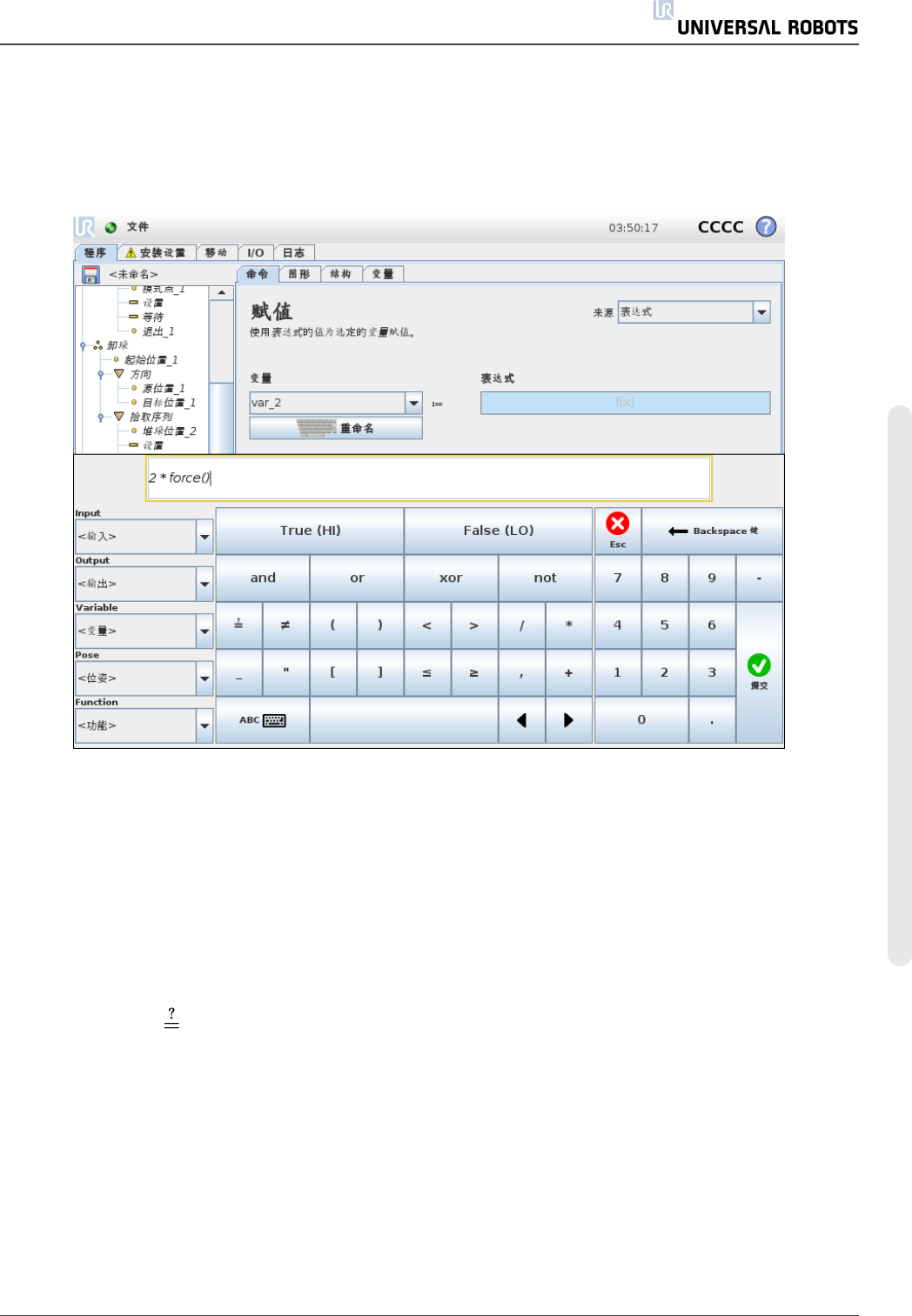
1.23. 屏幕编辑器
1.23.1. 屏幕表达式编辑器
虽然表达式本身是以文本形式进行编辑,但表达式编辑器也提供了许多按钮和函数,可用于
插入特殊表达式符号,例如,表示相乘的 * 符号和表示小于等于的 ≤ 符号。使用屏幕左上角的
键盘符号按钮可切换至表达式文本编辑模式。可以在Variable selector, while the names of the
input and output ports can be found in the Input and Output selectors. Some special functions are
found in Function中找到所有已定义的变量。
按“确定”按钮时,系统将检查表达式是否存在语法错误。按“取消”按钮将离开屏幕,放弃所有
更改。
表达式类似如下形式:
digital_in[1] True and analog_in[0]<0.5
1.23.2. 位姿编辑器屏幕
可以在此屏幕上指定机器人工具的目标关节位置或目标位姿( 位置和方向) 。此屏幕处于“离
线”状态,不直接控制机器人手臂。
用 户 手 册 107 UR5
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。