99312_UR5_User_Manual_zh_E67ON_Global.pdf - 第214页
小 心 如 果 不 安 装 安 全 光 幕 可 能 会 损 坏 机 器 人 和 模 塑 。 24V GND GND GND 24V 24V MAF MAF Euromap67 1.2 8.3. 安 装 机 器 人 和 工 具 构 建 工 具 和 安 装 表 面 之 前 , 集 成 商 必 须 考 虑 机 器 人 在 拾 取 和 放 置 动 作 期 间 关 节 4( 手 腕 2) 的 方 向 。 关 节 1 、 2 和 3 都 有 平 行…
警告
1. IMM 是一种极其危险的机器。请阅读并理解 IMM 手册。如果不以安全的
方式集成机器人和 IMM 可导致死亡、严重伤害或机器损坏。Universal
Robots 不对由 IMM 导致的任何损害负责( 例如,模塑的移动造成机器人
损害或人员伤亡) 。
2. 变更 IMM 时,应针对 IMM 进行新的风险评估。风险评估应考虑所有新的
风险,并同时评估已有风险,因为已有风险可能会有所增加。
3. 集成商应遵守所有国家和地方性 IMM 要求。本手册没有列出这些要求。
1.28. 机器人和 IMM 集成
以下小节介绍与集成商相关的重要信息。
1.28.1. 紧急停止和防护停止
机器人与 IMM 共用紧急停止信号。也就是说,机器人紧急停止功能也会紧急停止 IMM 的运
行,反之亦然。
防护停止信号( 安全装置 [ZA3-ZC3][ZA4-ZC4]) 可以确保当 IMM 上的门打开时,机器人进入
防护停止状态。
警告
1. Euromap 67 标准并未规定当机器人进入防护停止状态时应同时停止
IMM。这意味着操作员进入( 走进) 机器人工作空间时,应避免进入( 接
触) IMM 的工作空间( 除非 IMM 上的安全设备能够在操作员进入( 接
触) IMM 工作空间时实现安全停止) 。如果要求安全装置可同时对机器人
和 IMM 采取防护性停机,则必须将其连接到 IMM。
2. 如果第三方机器通过控制箱 [EEA-EEB] 上专门的“外部紧急停止”输入连
接到机器人,那么按下第三方机器上的紧急停止按钮时只有机器人会紧
急停止,而 IMM 不会紧急停止!
3. 务必验证并确保与安全相关的所有功能可正常工作。详阅机器人和 IMM
手册中的安全功能要求。
1.28.2. 连接 MAF 安全光幕
Euromap 67 电缆中的 MAF 信号 [A3-C3] 使模具能够稳健移动。务必小心,当机器人进入注塑
机内部时要避免模具关闭。
Euromap 67 接口不附带提供 MAF 安全光幕。也就是说,机器人程序出错可能会导致 IMM 模具
闭合,从而压坏机器人。不过,可以连接一个安全光幕( 如下图所示) ,避免这类事故发生。几
百美元即可购买一套 1 类
1
光幕( 如 Pilz 的
PSEN op 2H-s/1
) 。
用 户 手 册 203 UR5
EUROMAP 67 Interface
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
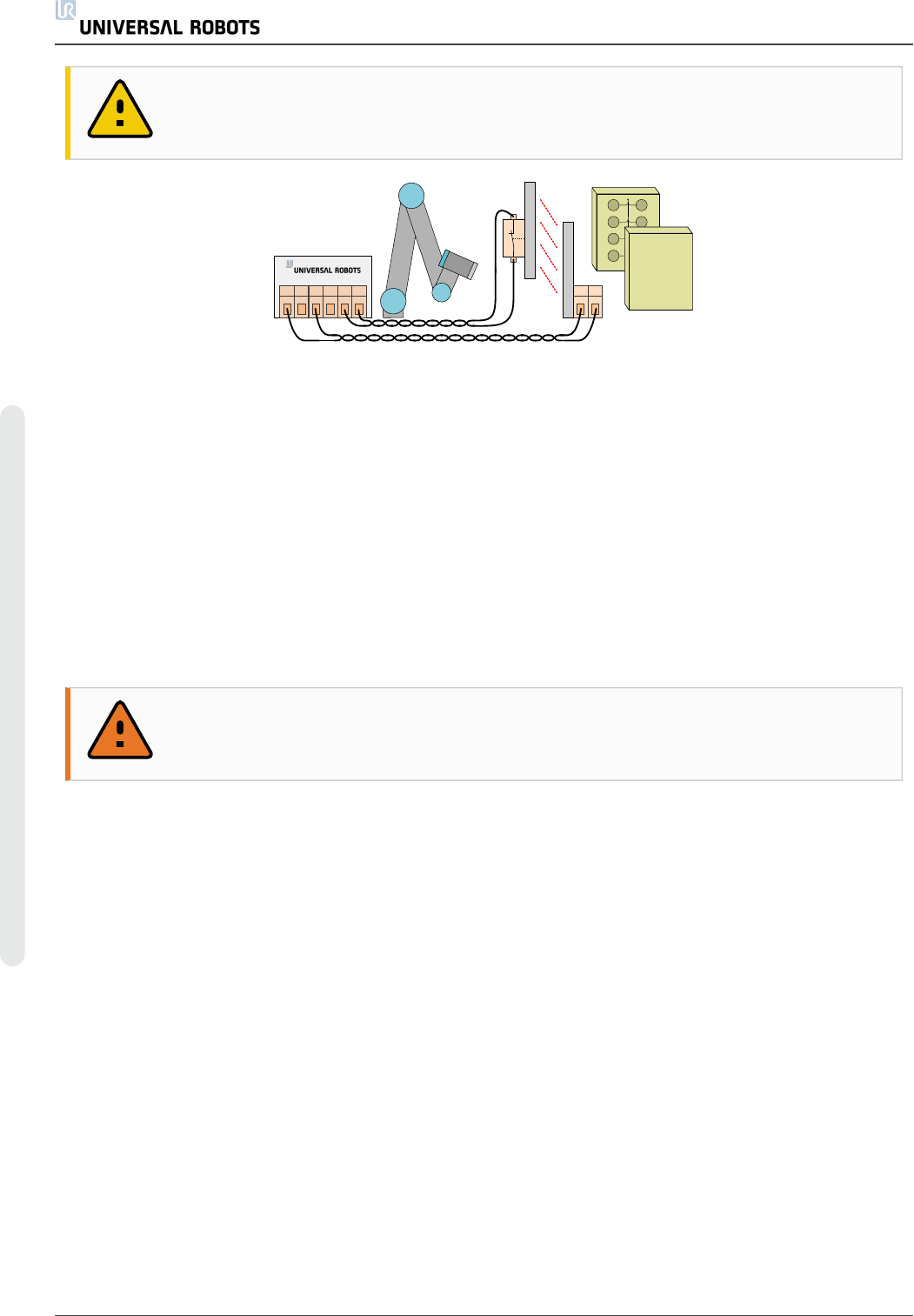
小心
如果不安装安全光幕可能会损坏机器人和模塑。
24V GND
GND GND
24V 24V
MAF MAF
Euromap67
1.28.3. 安装机器人和工具
构建工具和安装表面之前,集成商必须考虑机器人在拾取和放置动作期间关节 4( 手腕 2) 的方
向。关节 1、2 和 3 都有平行轴,如果关节 4 使关节 5 向左或向右,那么关节 5 即会与其他三个
轴平行,形成奇点。通常,最好是将机器人呈 45 度角安放,或者在构建工具时,使机器人从垂
直模具表面抓握工件时,机器人工具法兰表面朝下。
1.28.4. 使用不带 IMM 的机器人
要操作不带 IMM 的机器人,必须使用旁通塞关闭紧急和安全信号。除此之外,唯一的方法就
是彻底拆下 Euromap 67 接口,如 在本页217中所述。
警告
如果机器人上安装了 IMM,切勿使用旁通塞。
1.28.5. EUROMAP 12 转换为 EUROMAP 67
要将 IMM 连接到 Euromap 12 接口,必须使用 E12 - E67 适配器。市面有几种由不同制造商生产
的适配器。不过遗憾的是,大多数适配器是在以特定设计选件为前提,针对特定的机器人或
IMM 而设计制造的。这意味着,某些适配器将无法正确连接 UR 机器人和 IMM。建议在使用或
设计制造适配器时,同时参阅 Euromap 12 和 Euromap 67 标准。
下面列出了常见错误:
1. A9 和 C9 之间的电压测量值是否为 24V?
• IMM 必须供应 24V 电压方能启用 I/O 信号。
• 如果机器人和 IMM 具有共用的 -/0V 接头,则可以通过将 A9 连至 ZA9、C9 连至
ZC9 来使用机器人的 24V 电源。IMM 的 Euromap 12 插脚 32 上通常提供 24V 电压。
2. 适配器是否可以切换两个机器人紧急信道和两个机器人安全装置信道?
• 这通常需要使用 4 个继电器来实现。
UR5 204 用 户 手 册
EUROMAP 67 Interface
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
警告
确保 E12-E67 变换器符合 EUROMAP 67 和 EUROMAP 12 标准,并且安全功能
按正确的性能级别构建。如果不遵守该警告,有可能会造成严重的人员伤亡,
因为安全功能有可能失效。
1.29. GUI
下面章节将介绍如何从 GUI 控制 euromap 接口,如何验证从 IMM 发出或发送至 IMM 的信号,
如何使用结构化程序语句完成一些简单的编程工作,以及如何直接使用信号实现更高级的操
作。
不过,我们强烈推荐使用 Euromap 67 程序模板,这样就无需从头开始编写程序,具体详见下
一小节内容。
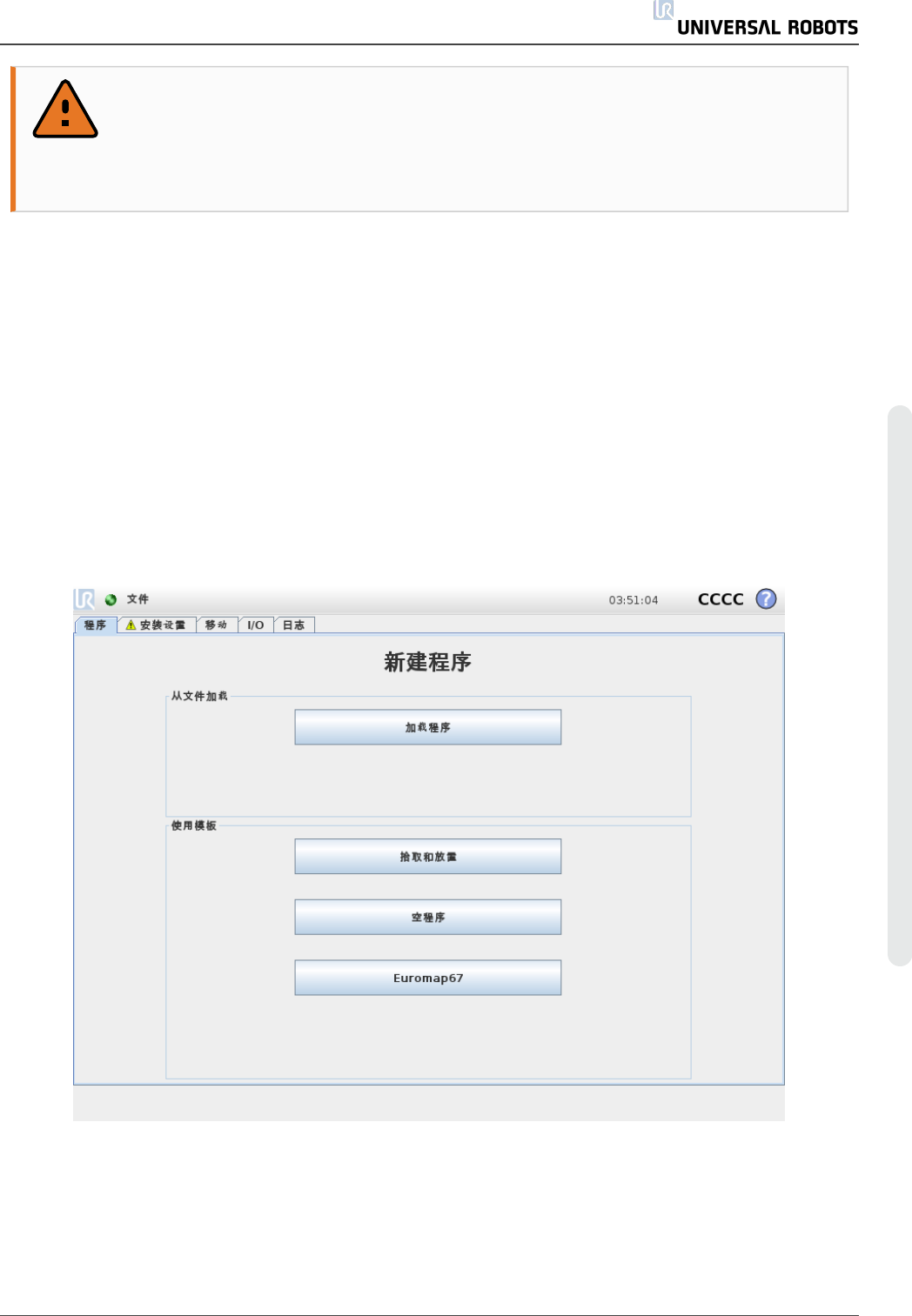
1.29.1. EUROMAP 67 程序模板
安装 Euromap 67 接口后,屏幕上会多出一个按钮,使用此按钮可以访问 Euromap 67 程序模
板。
选择 Euromap 67 程序模板后,将在程序屏幕上显示加载的模板。随后,屏幕左侧将显示模板
结构。
用 户 手 册 205 UR5
EUROMAP 67 Interface
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。