99312_UR5_User_Manual_zh_E67ON_Global.pdf - 第184页
1.2 5.21. 命 令 : 事 件 “ 事 件 ” 命 令 可 用 于 监 控 输 入 信 号 , 以 及 在 输 入 信 号 呈 高 电 平 时 执 行 某 个 动 作 或 设 置 变 量 。 例 如 , 当 输 出 信 号 呈 高 电 平 时 , 事 件 程 序 可 等 待 200m s , 然 后 将 其 重 新 设 置 为 低 电 平 。 这 样 , 如 果 外 部 机 器 上 的 触 发 机 制 是 上 升 沿 而 非 高…
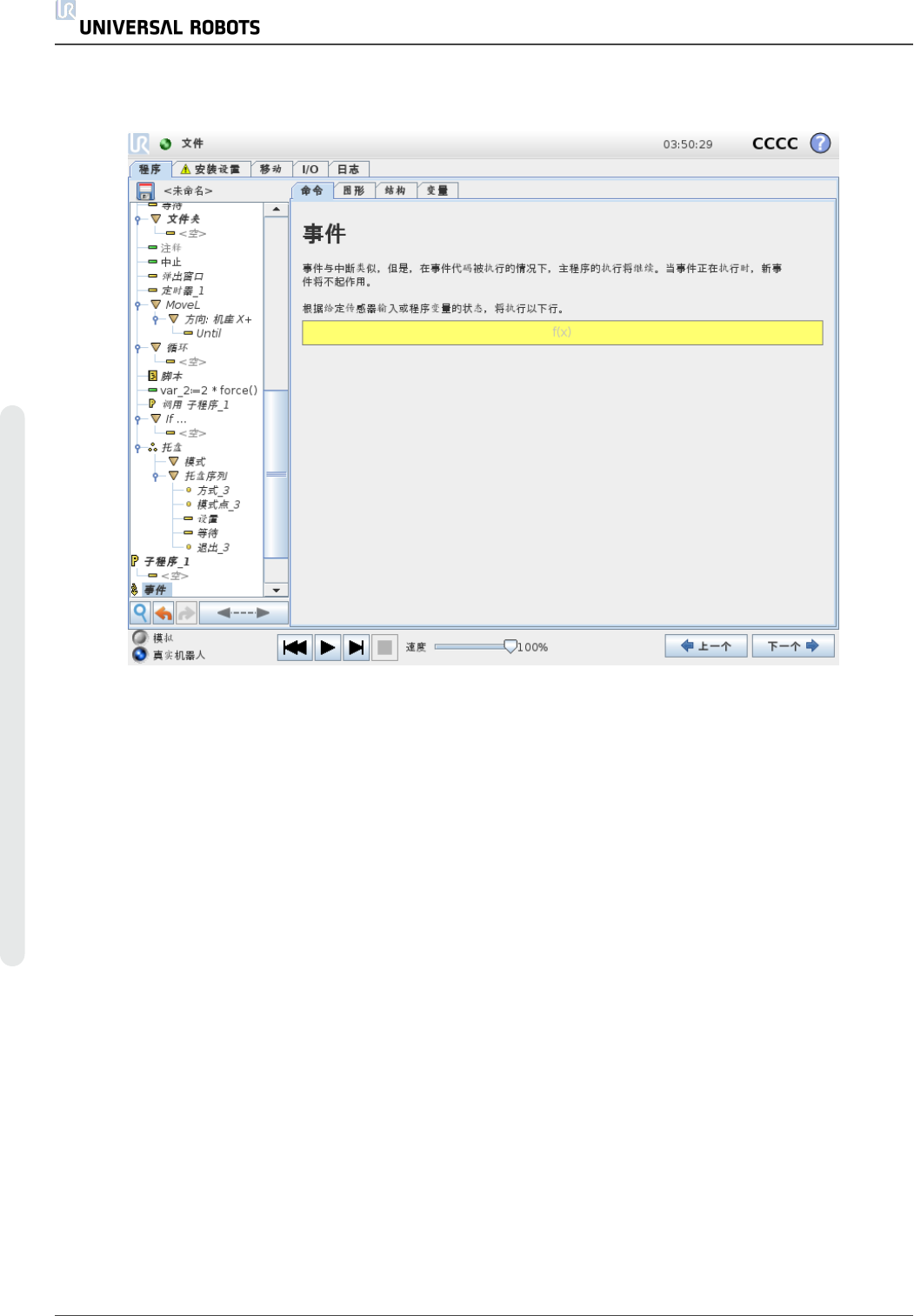
1.25.21. 命令:事件
“事件”命令可用于监控输入信号,以及在输入信号呈高电平时执行某个动作或设置变量。例
如,当输出信号呈高电平时,事件程序可等待 200ms,然后将其重新设置为低电平。这样,如
果外部机器上的触发机制是上升沿而非高输入电平时,主程序代码要简单得多。每个控制周
期 (8ms) 对事件进行一次检查。
UR5 174 用 户 手 册
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
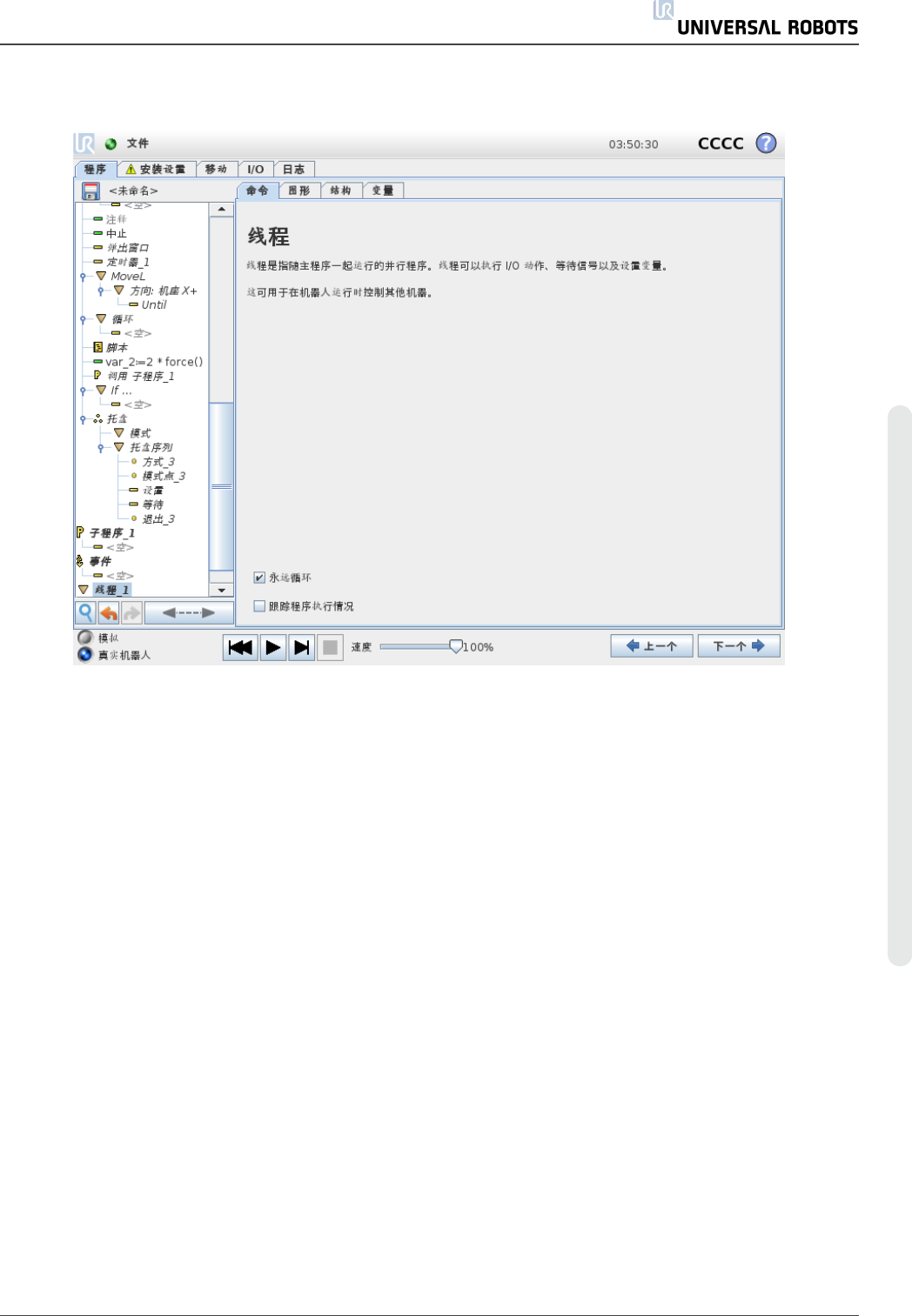
1.25.22. 命令:线程
线程是机器人程序的一个并行进程。线程可用于控制与机器人手臂无关的外部机器。线程可
以通过变量和输出信号和机器人程序进行通信。
用 户 手 册 175 UR5
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。