99312_UR5_User_Manual_zh_E67ON_Global.pdf - 第140页
15. 1 : 基 本 特 征 15. 2 : 工 具 (T CP ) 特 征 使 用 点 特 征 、 直 线 特 征 和 / 或 平 面 特 征 定 义 特 征 位 姿 。 这 些 特 征 通 过 使 用 工 作 区 中 T CP 的 当 前 位 姿 的 方 法 进 行 定 位 。 因 此 , 您 可 以 使 用 自 由 驱 动 或 “ 缓 慢 移 动 ” 将 机 器 人 移 动 到 所 需 位 姿 来 示 教 特 征 位 置 。 特…
1.24.12. 安装设置 → 特征
特征表示由相对于机器人机座的六维位姿( 位置和方向) 定义的对象。您可以命名特征以供将
来参考。
机器人程序的某些子部分包括相对于机器人手臂机座之外的特定对象执行的移动。这些对象
可以是机器人手臂周围的桌子、其他机器、工件、观察系统、坯料或边界。
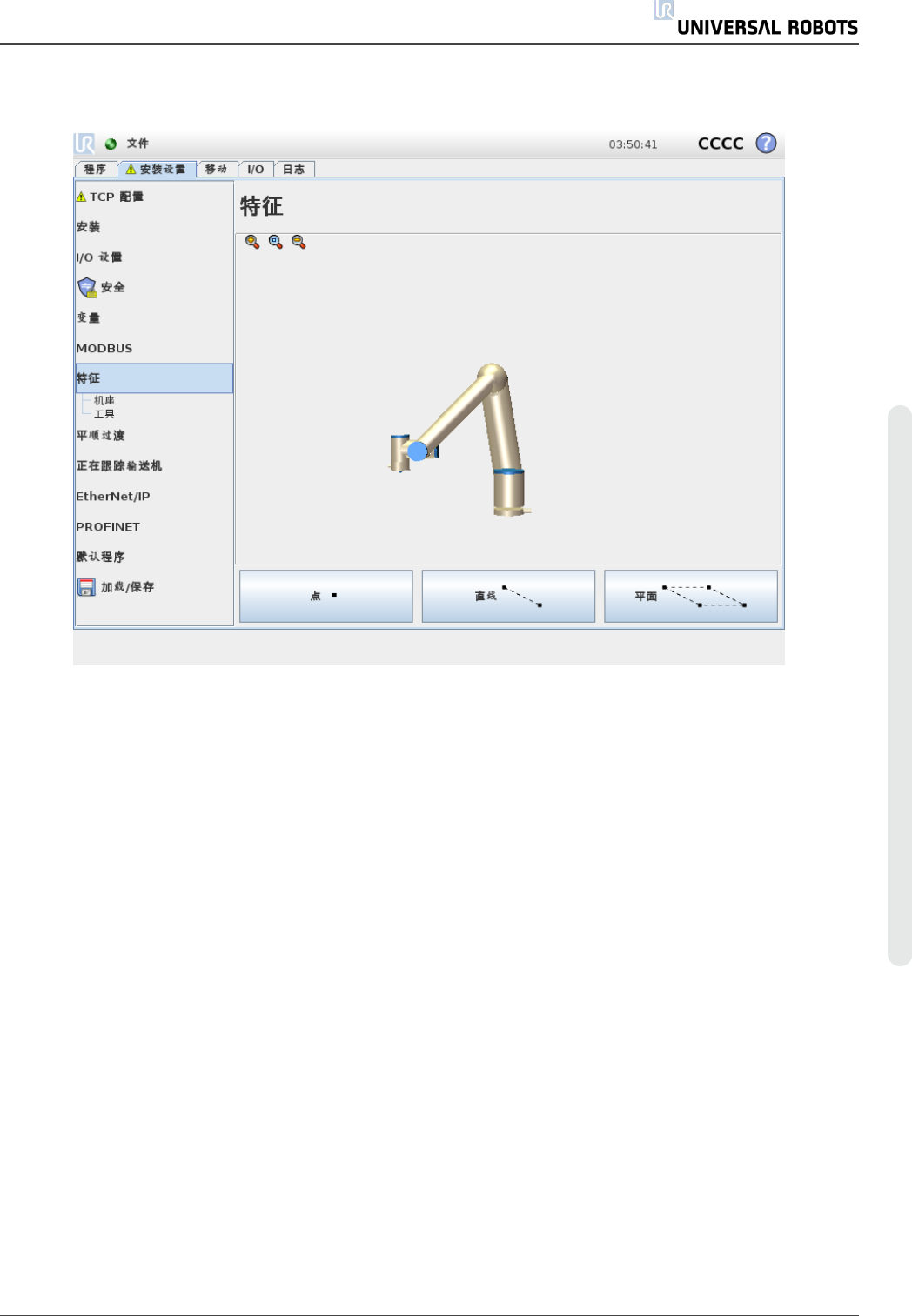
机器人包括以下两个预定义特征,其位姿由机器人手臂自身的配置定义:
• 机座特征,其原点位于机器人机座的中心( 参见图 15.1) 。
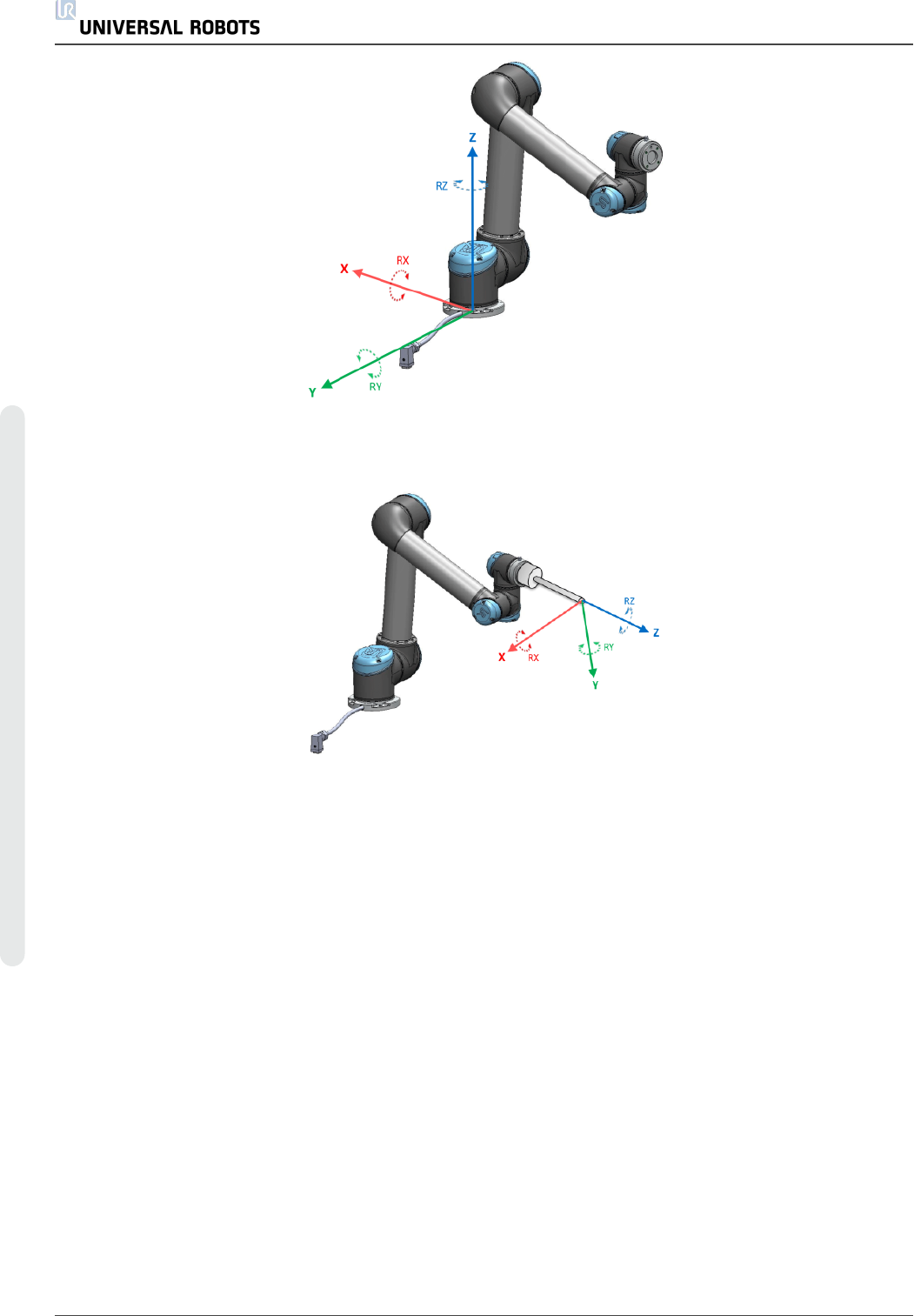
• 工具特征,其原点位于当前 TCP 的中心( 参见图 15.2) 。
用 户 手 册 129 UR5
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
15.1:
基本特征
15.2:
工具 (TCP) 特征
使用点特征、直线特征和/或平面特征定义特征位姿。
这些特征通过使用工作区中 TCP 的当前位姿的方法进行定位。因此,您可以使用自由驱动或
“缓慢移动”将机器人移动到所需位姿来示教特征位置。
特征的选择取决于所用对象的类型和精度要求。尽可能使用直线特征和平面特征,因为它们
基于更多的输入点。输入点越多意味着精度越高。
例如,您可以通过定义具有尽可能多的物理间隔的直线特征的两个点来准确定义线性输送机
的方向。您也可以使用点特征定义线性输送机,但必须将 TCP 指向输送机的移动方向。
使用更多的点来定义桌子的位姿意味着方向是基于单一 TCP 的位置而不是方向。单一 TCP
方向难以进行高精度配置。
有关添加特征的更多信息,请参阅以下小节:对页、在本页132和平面特征 在本页133。
使 用 特 征
您可以引用机器人程序的安装设置中定义的特征,将机器人移动( 如 MoveL 和 MoveP 命令)
与该特征关联起来( 请参阅1.25.4. 命令:移动 在本页149一节) 。
UR5 130 用 户 手 册
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。

例如,当存在多个机器人站、在程序运行期间移动对象或在场景中永久移动对象时,这可以轻
松调整机器人程序。调整对象的特征时,相对于该对象的所有程序移动都会相应地调整。有关
更多示例,请参阅示例:手动更新特征以调整程序 在本页134和示例:动态地更新特征位姿 在
本页135小节。通过“移动”选项卡( 1.24. 机器人控制 在本页111小节) 或位姿编辑器屏幕( 请参
阅1.23.2. 位姿编辑器屏幕 在本页107) 手动移动机器人时,配置为可缓慢移动的特征也是非常
有用的工具。选择某个特征作为参考时,用于平移和旋转的“移动工具”按钮将在所选的特征空
间中操作( 请参阅特征和工具位置 在本页112和移动工具 在本页112) ,读取 TCP 坐标。例如,
如果一个表被定义为一个特征并被选为移动选项卡中的一个参考,那么转换箭头( 即上/下、左
/右、前进/后退) 将机器人在相对于表的这些方向上移动。此外,TCP 坐标将位于表的框架中。
重 命 名
此按钮重命名一个特征。
删 除
使用此按钮可删除所选特征及任何子特征。
显 示 坐 标 轴
选择是否在 3D 视角中显示所选特征的坐标轴。该选择适用于此屏幕和移动屏幕。
更 改 点
使用更改此点按钮可设置或更改所选特征。将显示移动选项卡( 1.24. 机器人控制 在本页111小
节) ,可在其中设置新特征位置。
可 唤 醒
选择所选特征是否将可唤醒。这确定该特征是否将显示在移动屏幕的特征菜单中。
使 用 “移 至 此 处 ”
点按移至此处可将机器人手臂移向所选特征。移动结束后,特征的坐标系和 TCP 的坐标系将
重合。
点 特 征
点特征定义机械手臂的安全边界或全局主配置。点特征的位置由 TCP 的位置来定义。
添 加 点
1. 在“安装设置”中,选择特征。
2. 在“特征”下,选择点。
用 户 手 册 131 UR5
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。