99312_UR5_User_Manual_zh_E67ON_Global.pdf - 第196页
方 向 方 向 由 两 个 位 置 确 定 , 通 过 第 一 个 位 置 TC P 到 第 二 个 位 置 TC P 之 间 的 位 置 差 距 来 计 算 。 注 意 : 方 向 不 考 虑 点 的 朝 向 。 下 一 个 码 垛 位 置 表 达 式 机 器 人 手 臂 沿 着 方 向 矢 量 移 动 , 同 时 不 断 判 断 是 否 已 到 达 下 一 个 堆 垛 位 置 。 当 表 达 式 被 评 估 为 Tr ue 时 , …
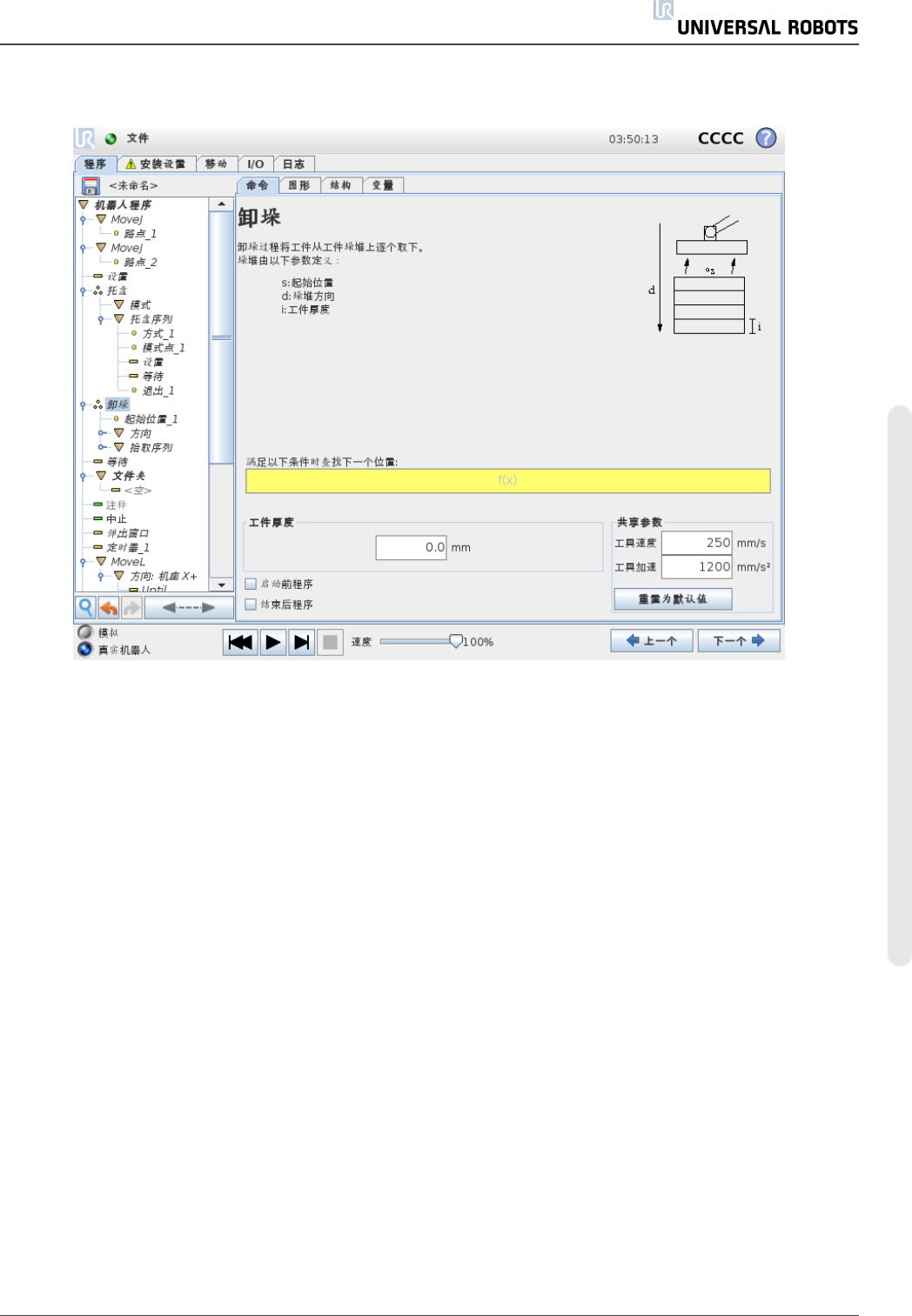
卸 垛
卸垛时,机器人手臂将从起始位置沿着指定方向移动,搜索下一个物品。屏幕上的条件决定何
时到达下一工件。当条件满足时,机器人将记住此位置并执行特定序列。在下一轮,机器人将
从所记住的位置开始以工件厚度为增量沿着卸垛方向搜索。
起 始 位 置
起始位置是指开始执行堆垛操作的位置。如果省略了起始位置,则码垛操作将从机器人手臂
的当前位置开始。
用 户 手 册 185 UR5
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
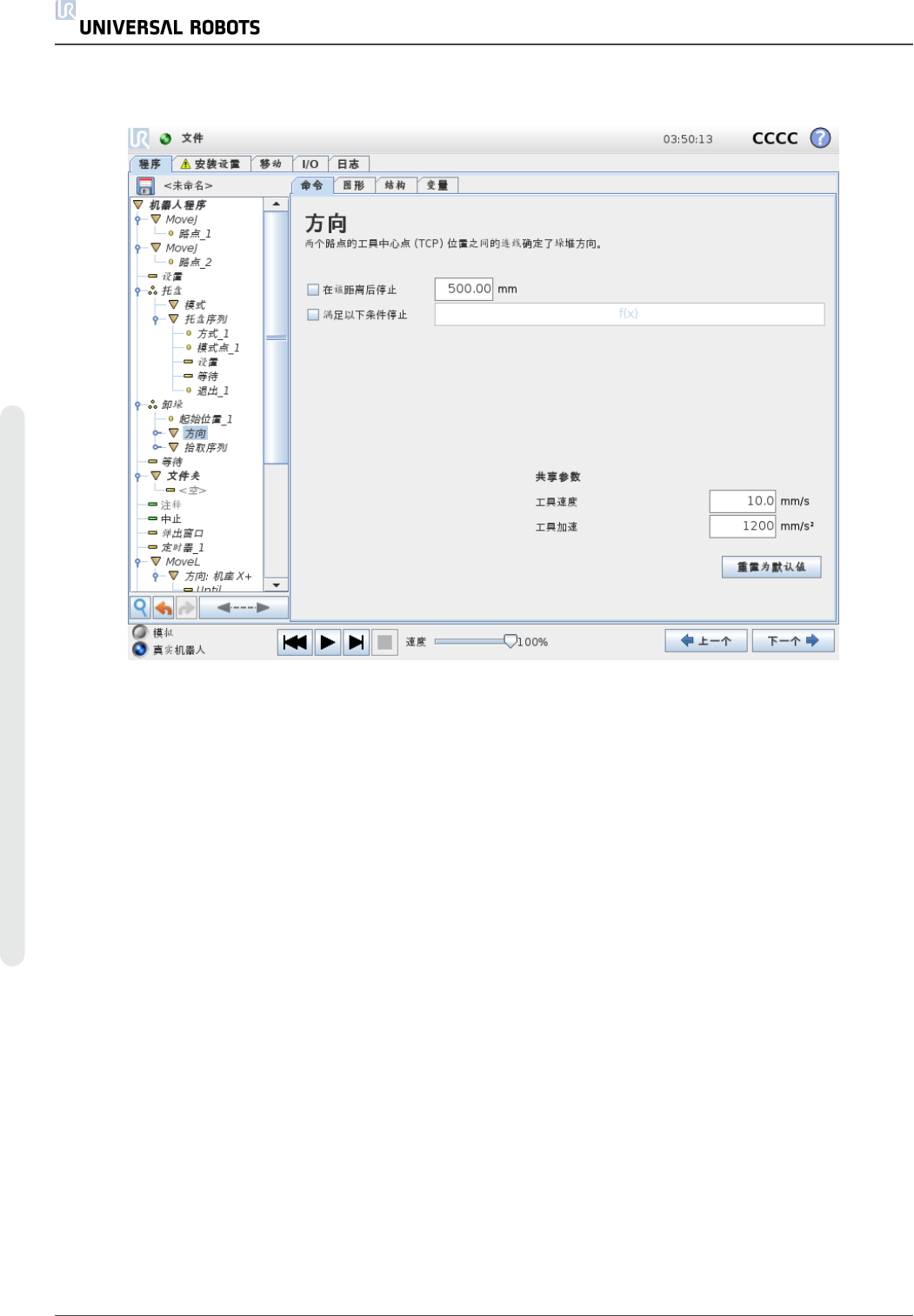
方 向
方向由两个位置确定,通过第一个位置 TCP 到第二个位置 TCP 之间的位置差距来计算。
注意:方向不考虑点的朝向。
下 一 个 码 垛 位 置 表 达 式
机器人手臂沿着方向矢量移动,同时不断判断是否已到达下一个堆垛位置。当表达式被评估
为 True 时,将执行特殊序列。
“开 始 前 ”
可选的BeforeStart序列在操作开始之前运行。这可用于等待信号就绪。
“结 束 后 ”
可选的AfterEnd序列在操作完成之后运行。这可用于向输送机发送开始运动信号,以为下一
个堆垛做好准备。
拾 取 /放 置 序 列
拾取/放置序列是在每个码垛位置执行的一个特殊程序序列,与码垛操作类似( 请参阅1.25.29.
命令:码垛 在本页182) 。
UR5 186 用 户 手 册
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
1.25.31. 命令:输送机跟踪
提示
此功能如与“力”一起使用,可能会导致程序冲突。
• 请勿将此功能与“力”一起使用。
可对机器人进行配置以跟踪一台已配置输送机( 输送机1) 的移动。当安装设置中定义的输送
机跟踪正确配置时,机器人将调整移动以跟随输送机。可从向导中的“结构”选项卡下访问输送
机跟踪程序节点。当跟踪输送机时,该节点下的所有移动都是允许的,但是要与输送机皮带的
运动相关。安装设置选项卡下的输送机跟踪设置( 请参阅1.24.13. 输送机跟踪设置 在本页137
一节) 提供了用于配置机器人与绝对和增量编码器以及线性和圆形输送机协作的选项。
提示
控制箱只能容纳一个必须与输送机( 输送机 1) 一起使用的增量编码器。
1.25.32. 命令:抑制
程序运行时将会直接跳过被抑制的程序行。被抑制的程序行也可以解除抑制。使用这种方法
可以快速更改程序,而且确保不破坏原始内容。
1.25.33. 图形选项卡
当前机器人程序的图形化表示形式。TCP 的路径以 3D 视角显示,运动段显示为黑色,交融段
( 运动段之间的过渡) 显示为绿色。绿点标明程序中各路点处的 TCP 位置。机器人手臂的 3D
图显示机器人手臂的当前位置,机器人手臂的
阴影
部分显示机器人手臂到达屏幕左侧所选路
点的方式。
用 户 手 册 187 UR5
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。