99312_UR5_User_Manual_zh_E67ON_Global.pdf - 第127页
1.2 4.6. 安 装 设 置 → TCP 配 置 工 具 中 心 点 (TC P) 是 机 器 人 工 具 上 的 一 个 点 。 每 个 TC P 都 包 含 相 对 于 工 具 输 出 法 兰 中 心 而 设 定 的 转 换 和 旋 转 。 当 编 程 返 回 到 先 前 存 储 的 路 点 时 , 机 器 人 将 TC P 移 动 到 路 点 内 保 存 的 位 置 和 方 向 。 当 为 线 性 运 动 编 程 时 , TC…
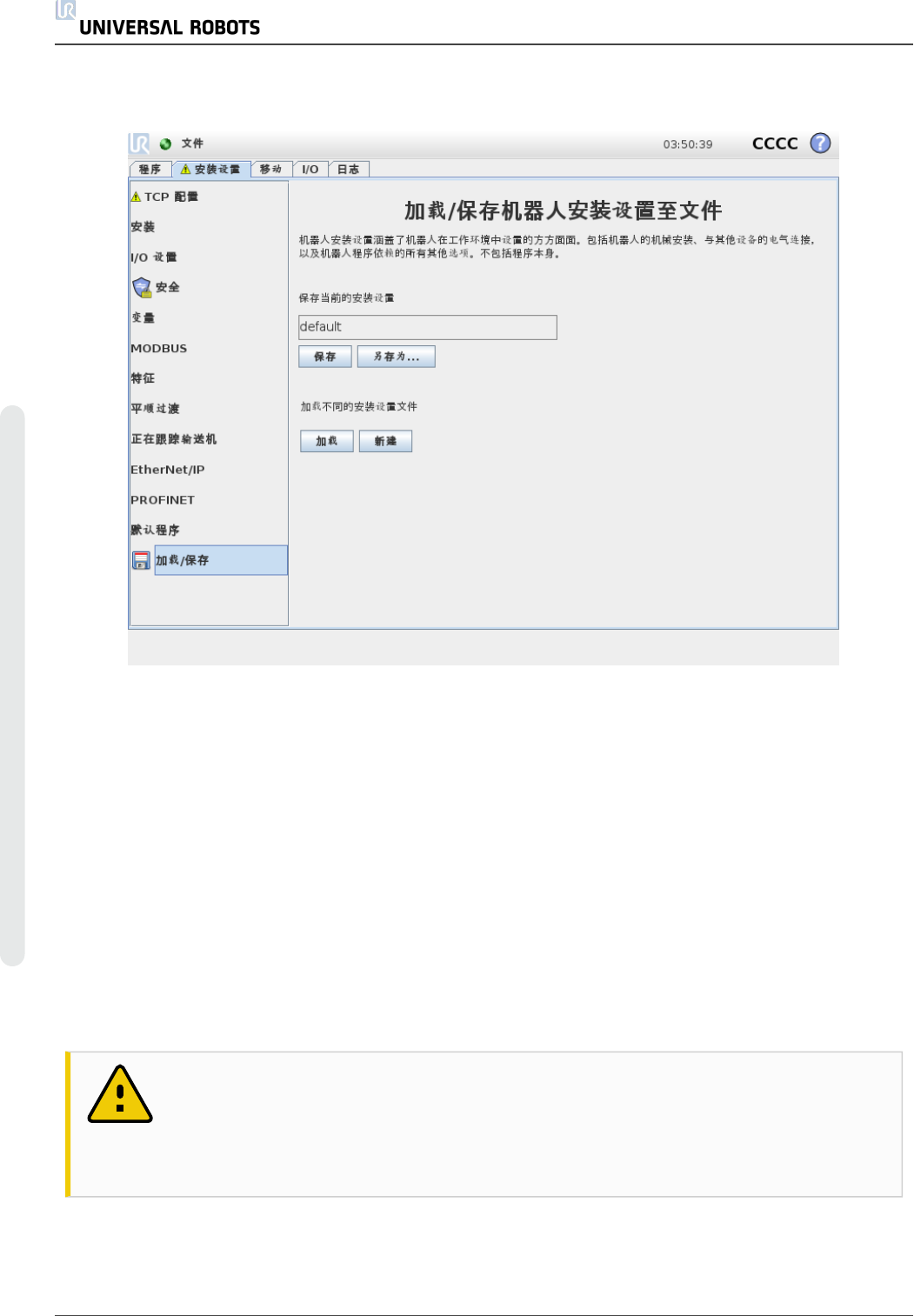
1.24.5. 安装设置 → 加载/保存
机器人安装设置涵盖了机器人手臂和控制箱如何安装在工作环境中的所有方面。包括机器人
手臂的机械安装、与其他设备的电气连接,以及机器人程序依赖的所有其他选项。不包括程序
本身。
这些设置可使用安装设置选项卡下的各个屏幕进行设置,有一个例外是 I/O 域在 I/O 选项卡
( 请参阅1.24.2. I/O 选项卡 在本页113) 中进行设置。
可以为机器人保存多份安装设置文件。所创建的程序将使用激活的安装设置,在使用程序时
会自动加载此安装设置。
对安装设置所做的任何更改均需要进行保存,以备断电后能够得以保留。如果安装设置中有
未保存的更改,安装设置选项卡左侧的加载/保存文本旁边会显示一个软盘图标。
按保存或另存为… 按钮可保存安装设置。此外,保存程序也会保存激活的安装设置。使用加载
按钮可加载其他安装设置文件。新建按钮可将机器人安装设置中的所有设置重置为出厂默认
设置。
小心
不推荐使用 USB 驱动器加载机器人安装设置。要使用 USB 驱动器上存储的安
装设置,请先加载该安装设置,然后使用另存为… 按钮将其保存在本地程序文
件夹中。
UR5 116 用 户 手 册
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
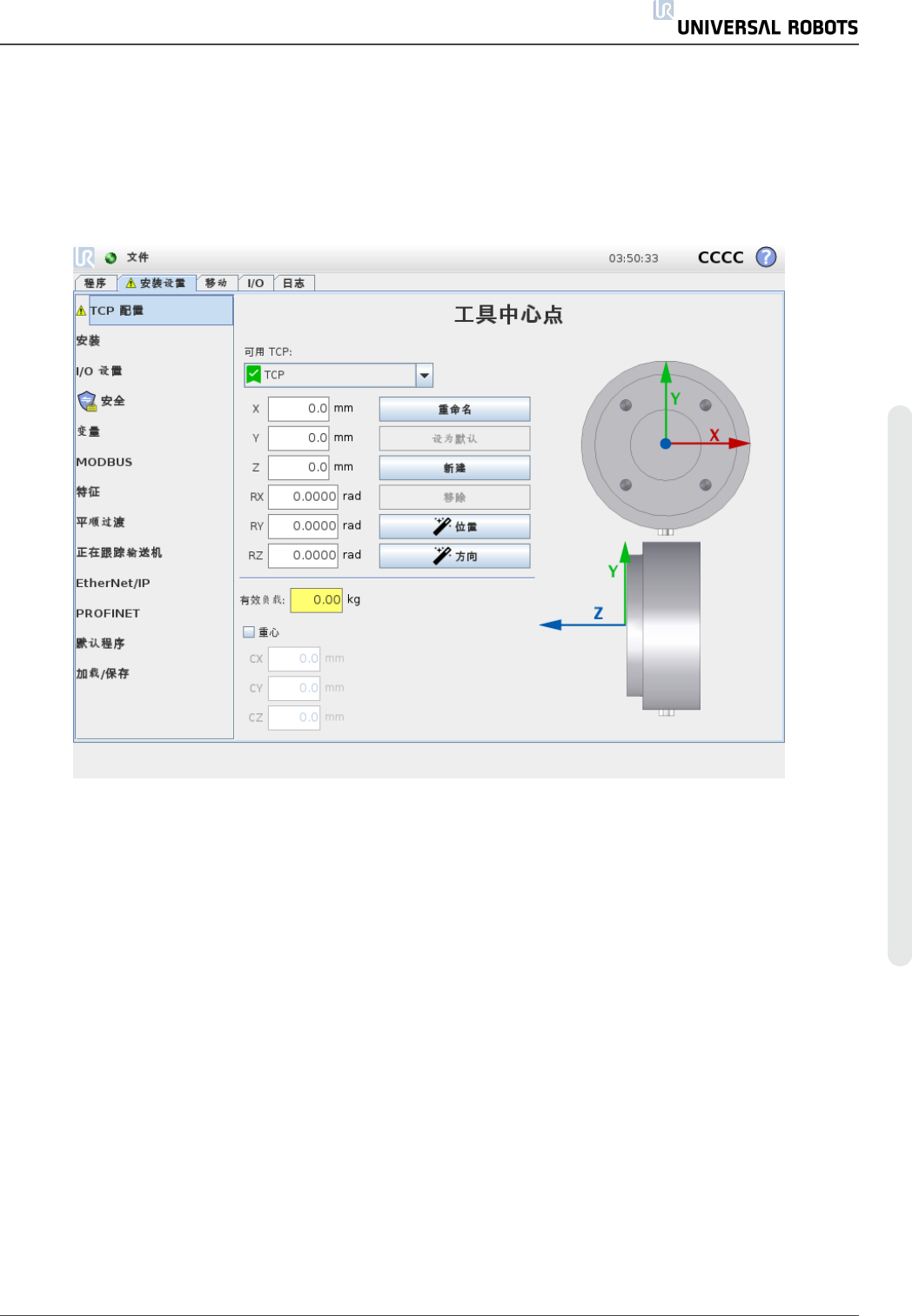
1.24.6. 安装设置 → TCP 配置
工具中心点 (TCP) 是机器人工具上的一个点。每个 TCP 都包含相对于工具输出法兰中心而设
定的转换和旋转。
当编程返回到先前存储的路点时,机器人将 TCP 移动到路点内保存的位置和方向。当为线性
运动编程时,TCP 以线性方式移动。
位 置
X、Y 和 Z 坐标指定 TCP 位置。当所有值( 包括方向) 均为零时,TCP 与工具输出法兰的中心点
重合,并应用屏幕显示的坐标体系。
方 向
RX、RY、RZ 坐标框制定TCP位置。与“移动”选项卡类似,使用 RX、RY、RZ 框上方的“单位”下
拉菜单可选择方向坐标( 请参阅1.23.2. 位姿编辑器屏幕 在本页107) 。
添 加 、重 命 名 、修 改 和 删 除 TCP
您可以通过以下操作开始配置新的 TCP:
•
点按使用唯一名称定义新 TCP。新 TCP 显示在下拉菜单中。
•
点按重命名 TCP。
•
点按移除选定的 TCP。不能移除最后一个 TCP。
用 户 手 册 117 UR5
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。

主 动 TCP
当进行线性移动时,机器人总是使用激活TCP定义TCP偏移量。可以使用一个“移动”命令( 请
参阅1.25.4. 命令:移动 在本页149) 或“设置”命令更改激活的 TCP。
默 认 的 TCP
运行一个程序前,必须按照激活TCP设置默认TCP。
• 选择所需的 TCP,点按设为默认将 TCP 设置为默认 TCP。
可用下拉菜单中的绿色图标表示默认配置的TCP
示 教 TCP 位 置
TCP 位置坐标可通过以下步骤自动计算:
1. 点按测量。
2. 在机器人工作空间中选择一个固定的点。
3. 使用屏幕右侧的位置箭头从至少三个不同角度移动 TCP,并保存工具输出法兰的相应
位置。
4. 使用设置按钮将验证的坐标应用于合适的 TCP。这些位置必须足够多样化,以确保计算
结果正确。如果它们不够多样化,按钮上方的状态 LED 将变为红色。
UR5 118 用 户 手 册
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。