99312_UR5_User_Manual_zh_E67ON_Global.pdf - 第60页
U R5 5 0 用 户 手 册 版 权 所 有 © 2 009–2021U ni ver s al R obots A/S 。 保 留 所 有 权 利 。
1.13. 质保
1.13.1. 产品质量保证
在无损于用户( 客户) 可能与经销商或零售商达成的任何索赔协议的原则下,制造商应根据以
下所列条款给予客户产品质量保证:
若新设备及其组件在投入使用后 12 个月内( 如包括运输时间则最长不超过 15 个月) ,出现因
制造和/或材料不良所致的缺陷,Universal Robots 应提供必要的备用部件,而用户( 客户) 应提
供人工来更换备件,使用体现最新技术水平的另一部件予以更换或维修相关部件。若设备缺
陷是由处理不当和/或未遵循用户指南中所述的相关信息所致,则本产品质量保证失效。本产
品质量保证不适用于或并不延伸至由授权经销商或客户自行执行的维护( 例如安装、配置、软
件下载) 。用户( 客户) 必须提供购买收据和购买日期作为享受产品质量保证的有效证据。根据
本产品质量保证提出的索赔必须于产品质量保证明显未得以履行的两个月内提出。被更换或
返至 Universal Robots 的设备或组件的所有权归 Universal Robots 所有。由设备引起或与设备相
关的任何其他索赔不在本产品质量保证范围之列。本产品质量保证中的任何条款均不试图限
制或排除客户的法定权利,也不试图限制或排除制造商对其疏忽而导致的人员伤亡所应承担
的责任。本产品质量保证持续时期不得因根据产品质量保证条款所提供之服务而延展。在不
违背本产品质量保证的原则下,Universal Robots 保留向客户收取更换或维修费用的权利。上
述规定并非暗示改变举证的责任而有损客户利益。如果设备呈现缺陷,Universal Robots 不承
担由此引起的任何损害或损失,包括但不仅限于生产损失或对其他生产设备造成的损坏。
如果设备呈现缺陷,Universal Robots 不承担由此引起的任何损害或损失,例如生产损失或对
其他生产设备造成的损坏。
小心
通常建议避免使用高于给定应用所需的加速度。高加速度,尤其是与高载荷相
结合,会缩短机器人的使用寿命。对于循环时间短、对速度要求高的应用,一般
建议尽可能多地使用交融,以确保轨迹平稳而无需高加速度。
1.13.2. 免责声明
Universal Robots 致力于不断提高产品的可靠性和性能,并因此保留升级产品的权利,恕不另
行通知。Universal Robots 力求确保本手册内容的准确性和可靠性,但不对其中的任何错误或
遗漏信息负责。
用 户 手 册 49 UR5
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
UR5 50 用 户 手 册
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
1.14. 制动时间和制动距离
下面关于停止时间和距离的信息适用于 0 类停机和 1 类
1
停机。本附录涵盖 0 类停机的相关信
息。有关 1 类停机的信息,请访问 http://universal-robots.com/support/。
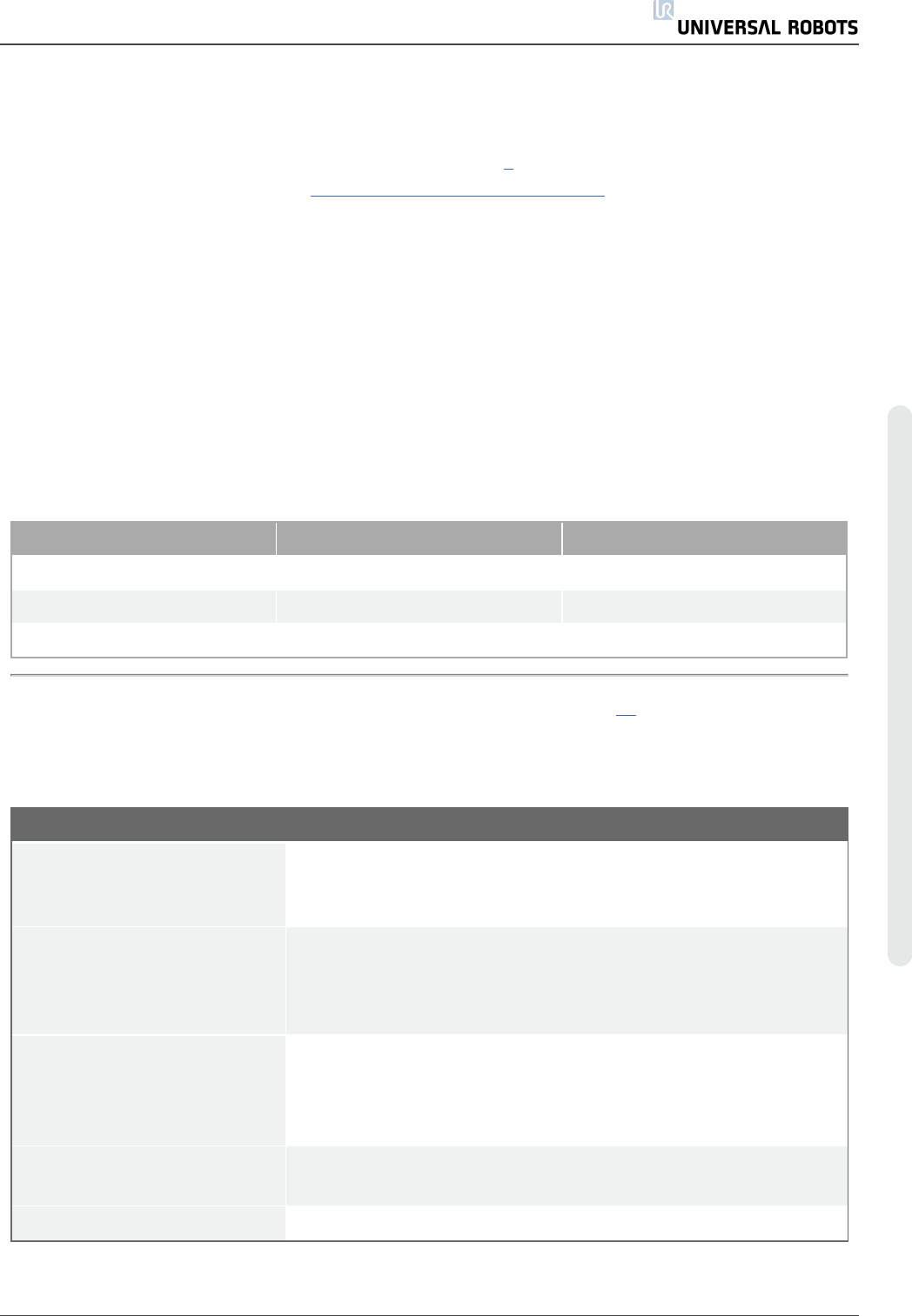
1.14.1. 0 类停机的停止距离和停止时间
下表中显示了触发 0 类停机时测得的停止距离和停止时间。这些测量结果对应于机器人的以
下配置:
• 伸展:100%( 机器人手臂完全水平伸展) 。
• 速度:100( 机器人的一般速度设为 100%,以 183 °/s 的关节速度进行移动) 。
• 有效载荷:连接到 TCP 的机器人可以处理的最大有效载荷 (5 kg )。
通过执行水平移动( 即旋转轴垂直于地面) 对关节 0 进行测试。在对关节 1 和关节 2 的测试过
程中,机器人遵循垂直轨迹,即旋转轴平行于地面,并在机器人向下移时停止。
停止距离 (rad) 停止时间 (ms)
关节 0( 底座) 0.31 244
关节 1( 肩部) 0.70 530
关节 2( 肘部) 0.22 164
1. 停机类别符合 IEC 60204-1,请参见术语表了解更多详细信息。↩
1.15. 声明和认证
EU Declaration of Incoporation in accordance with ISO/IEC 17050-1:2010
Manufacturer Universal Robots A/S
Energivej 25
DK-5260 Odense S Denmark
Person in the Community
Authorized to Compile the
Technical File
David Brandt
Technology Officer, Research and Development
Universal Robots A/S
Energivej 25, DK-5260 Odense S
Description and Identification of
the Partially-Completed
Machine(s)
Product and Function
Industrial robot (multi-axis manipulator with Control Box and Teach
Pendant). Function is determined by the completed machine (with
end-effector and intended use).
Model UR3, UR5, UR10 with CB3 control box (UR3/CB3, UR5/CB3,
UR10/CB3)
Serial Number Starting 20183000000 and higher --- Effective 1 January 2018
用 户 手 册 51 UR5
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。