99312_UR5_User_Manual_zh_E67ON_Global.pdf - 第224页
抽 芯 器 向 内 使 抽 芯 器 向 位 置 1 移 动 。 所 用 抽 芯 器 可 从 下 拉 菜 单 中 进 行 选 择 。 使 用 复 选 框 可 启 用 / 禁 用 各 个 步 骤 。 U R5 2 14 用 户 手 册 EU ROMAP 6 7 I n ter face 版 权 所 有 © 2 009–2021U ni ver s al R obots A/S 。 保 留 所 有 权 利 。
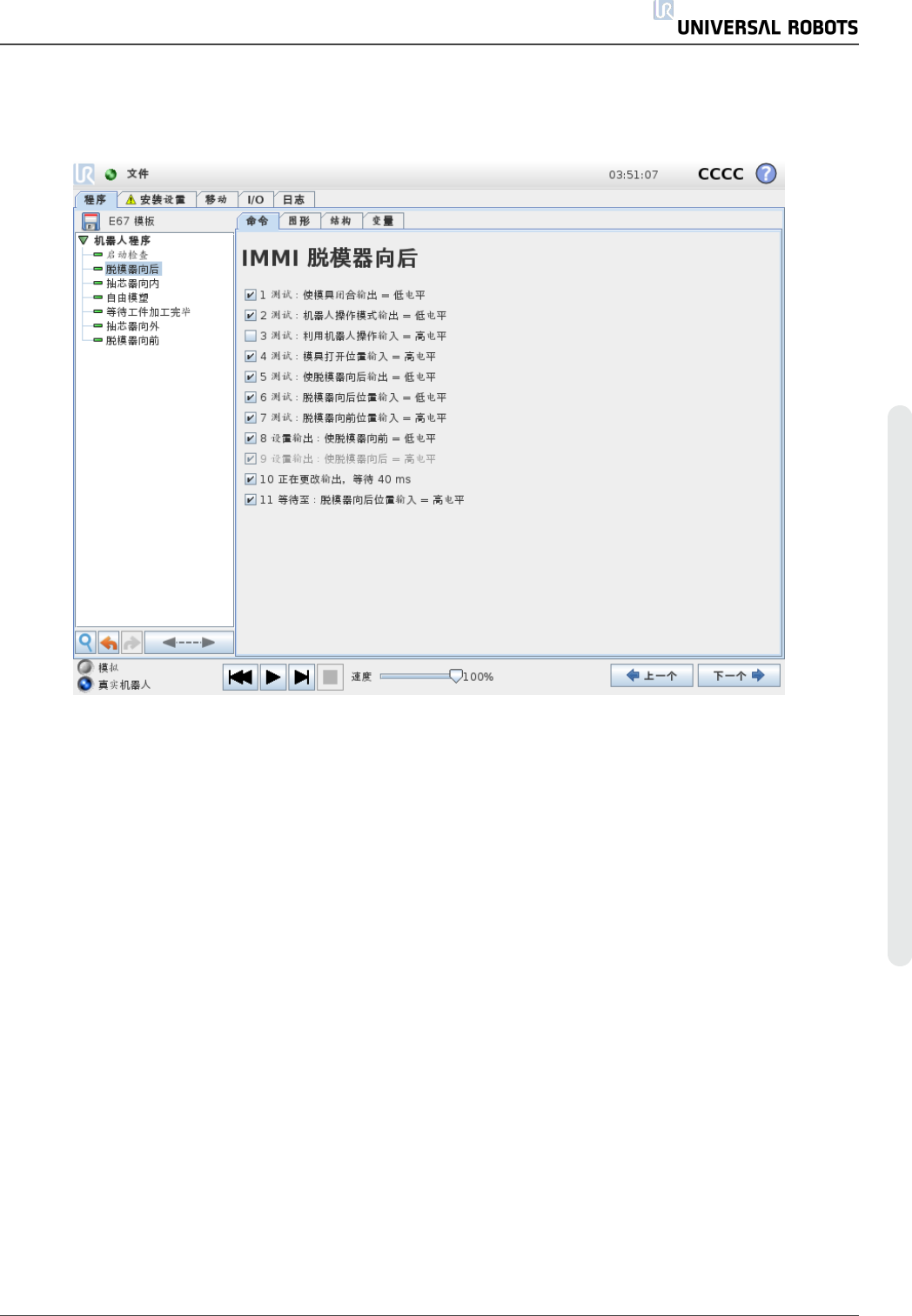
脱 模 器 向 后
使脱模器移到其向后位置。使用复选框可启用/禁用各个步骤。
用 户 手 册 213 UR5
EUROMAP 67 Interface
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
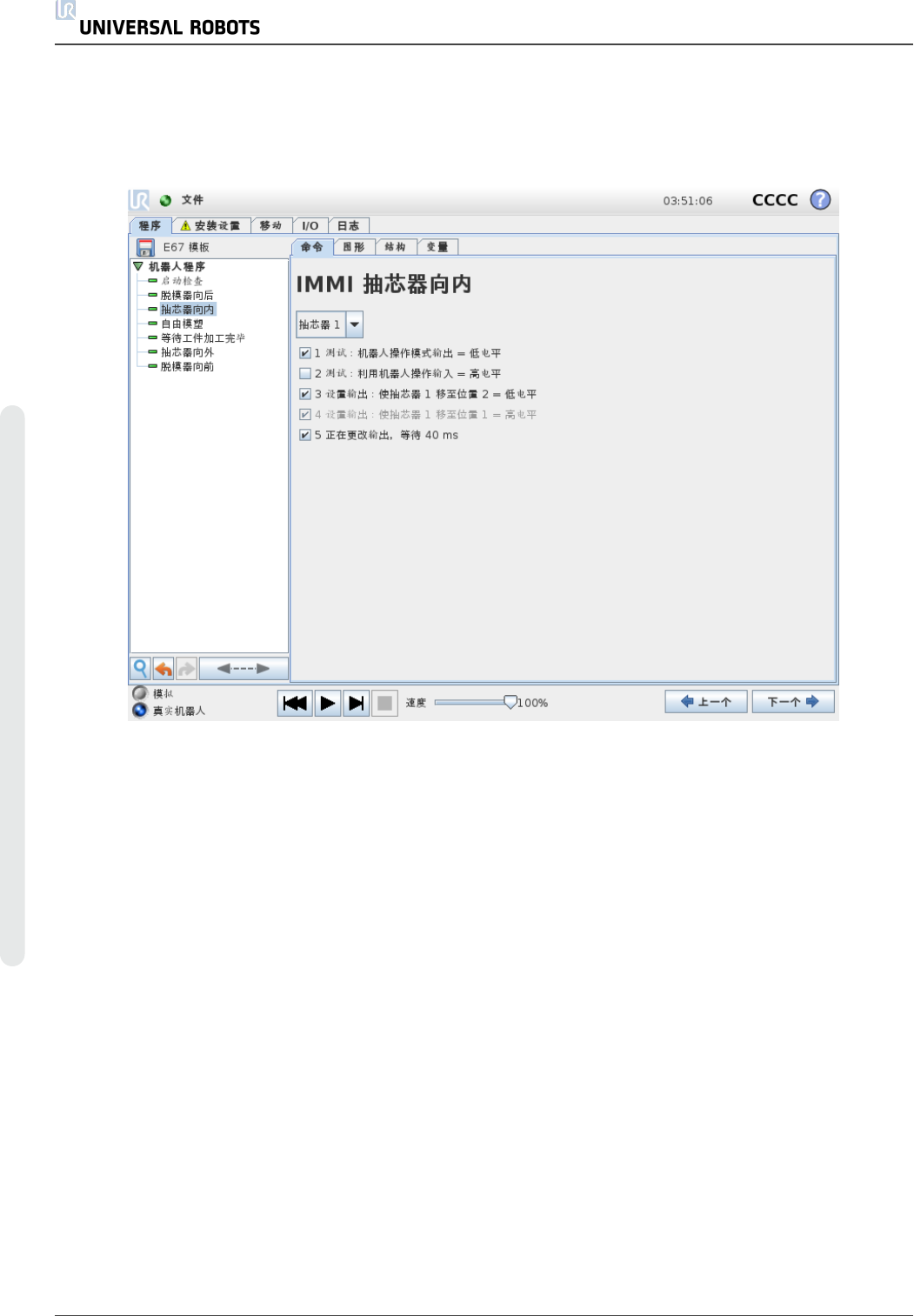
抽 芯 器 向 内
使抽芯器向位置 1 移动。所用抽芯器可从下拉菜单中进行选择。使用复选框可启用/禁用各个
步骤。
UR5 214 用 户 手 册
EUROMAP 67 Interface
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
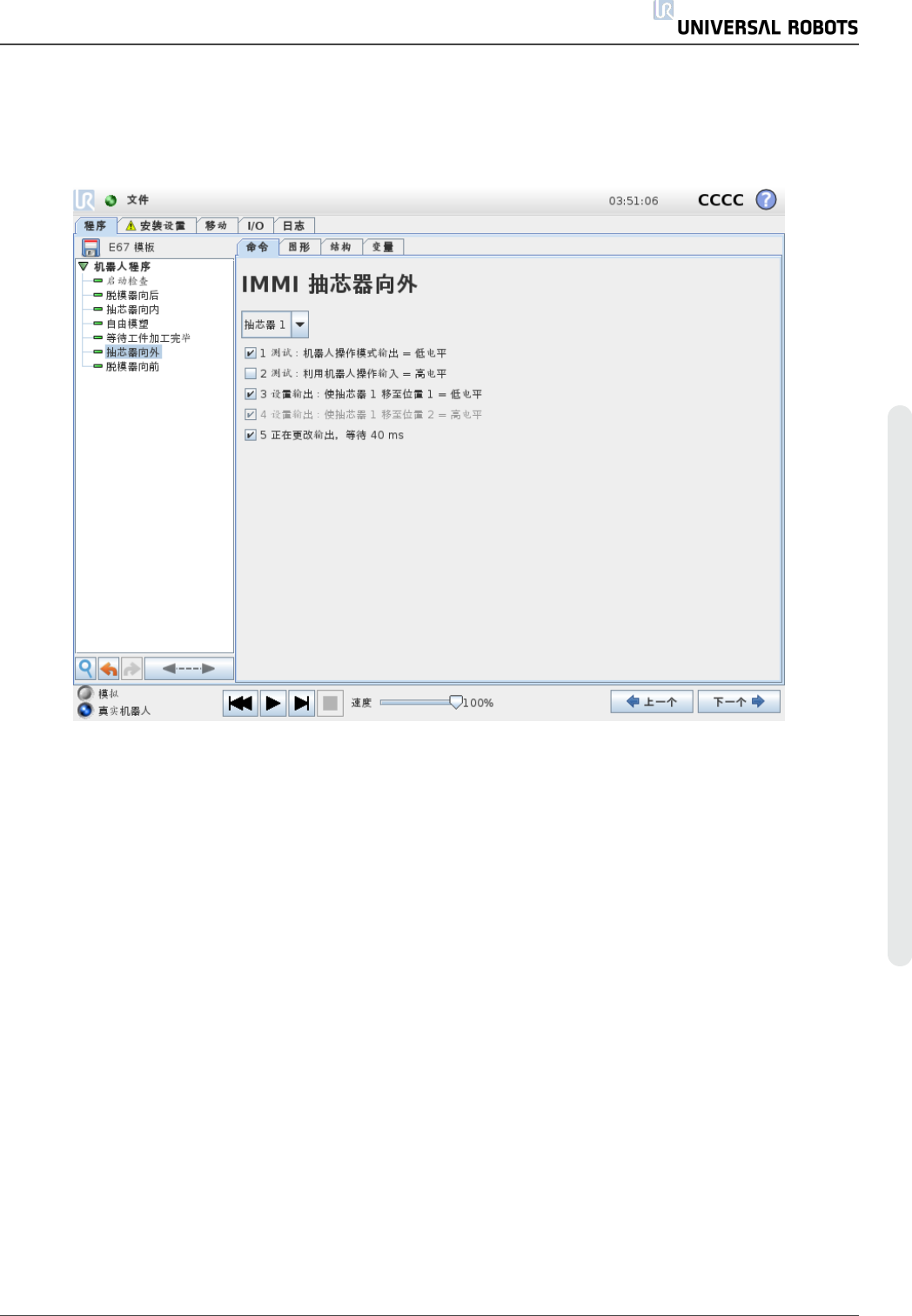
抽 芯 器 向 外
使抽芯器向位置 2 移动。所用抽芯器可从下拉菜单中进行选择。使用复选框可启用/禁用各个
步骤。
1.29.4. I/O 操作和等待
由于机器人数字输出可通过
动作
节点进行设置,因此,Euromap 67 输出信号也可通过此节点
进行设置。安装 Euromap 67 接口后,菜单中将显示这些输出信号,可以从中进行选择。此外,
作为机器人数字输入,Euromap 67 输入信号可用于控制程序行为,方式是插入
等待
节点,使程
序等到输入端为高电平或低电平时再运行。
对于高级用户,可将输出设置为指定表达式的值。此类表达式可以包含输入、输出和变量等,
也可用于包含复杂的程序功能。同样,
等待
节点可设置为等待表达式的值为真。通常,
Euromap 67 信号都会显示在表达式屏幕中,这意味着,只要可以选择表达式,即可使用这些信
号。
要使用不属于 EUROMAP 67 程序结构的信号,必须通过插入额外的
动作
、
等待
等节点来手动
设置或从程序读取这些信号。这适用于由制造商设定的信号和预留信号,尽管这些信号不会
显示在 Euromap 67 I/O 选项卡中,但都可使用。这也意味着,要使用
拒绝
和
中间模具打开位置
输入,必须自定义和扩展模板程序。
最后,建议不要手动设置
自由模塑区
信号,因为这可能导致出现危险情况。
用 户 手 册 215 UR5
EUROMAP 67 Interface
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。