99312_UR5_User_Manual_zh_E67ON_Global.pdf - 第119页
• 旋 转 矢 量 [ rad ] 方 向 以 旋 转 矢 量 形 式 给 出 。 轴 长 是 指 要 旋 转 的 角 度 , 以 弧 度 表 示 , 矢 量 本 身 给 定 了 要 绕 之 旋 转 的 轴 。 这 是 默 认 设 置 。 • 旋 转 矢 量 [ ∘ ] 方 向 以 旋 转 矢 量 形 式 给 出 , 其 中 , 矢 量 的 长 度 是 要 旋 转 的 角 度 , 以 度 为 单 位 。 • R PY [ rad ] 滚…
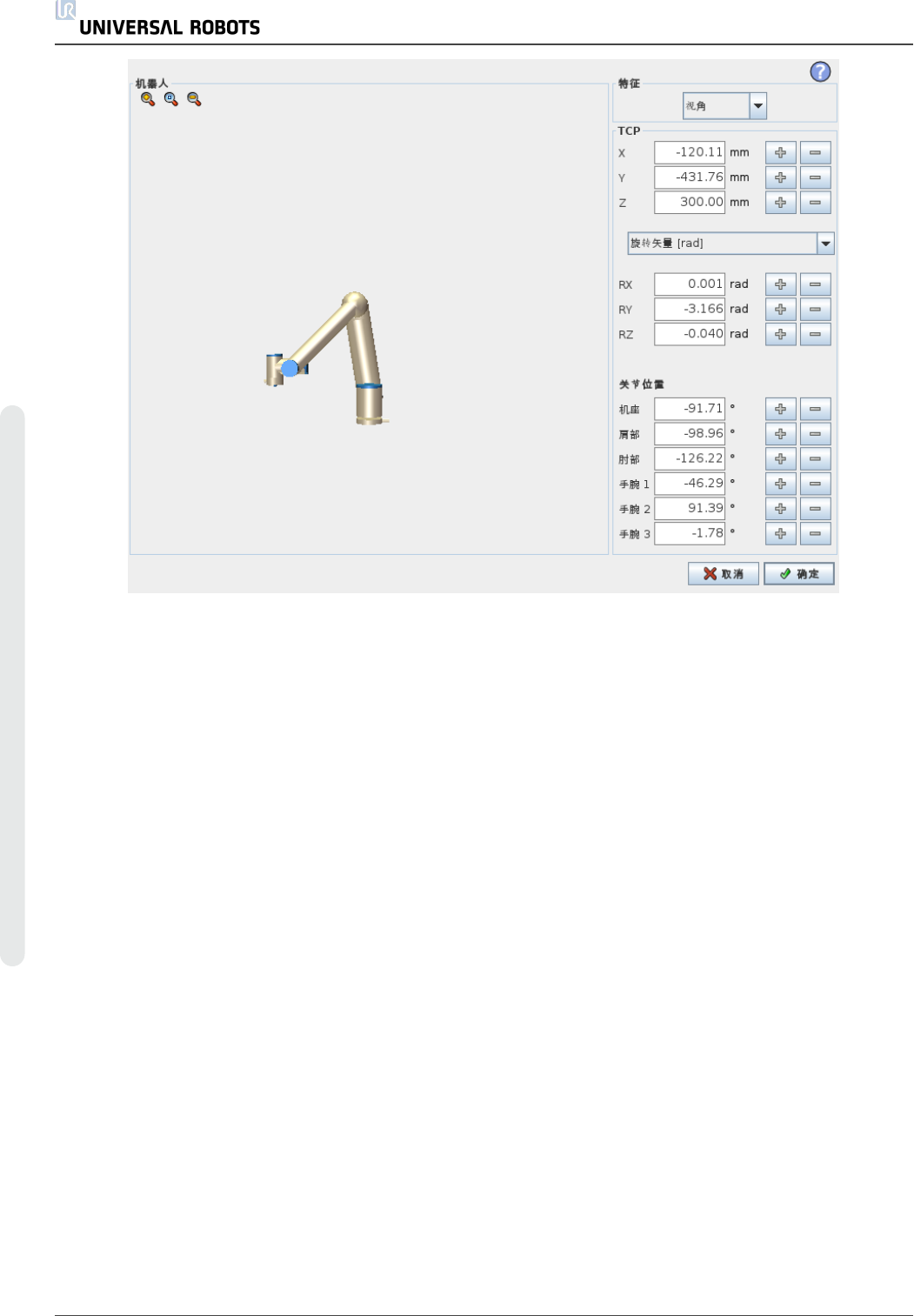
机 器 人
以 3D 视角形式显示机器人手臂的当前位置和指定的新目标位置。机器人手臂的 3D 图显示机
器人手臂的当前位置,机器人手臂的“阴影”部分显示由屏幕右侧指定值控制的机器人手臂的
目标位置。按放大镜图标可缩放视角,拖动手指图标可更改视角。
如果机器人 TCP 的指定目标位置距离安全平面或触发平面很近,或者机器人工具的方向接近
工具方向边界限值( 请参阅1.21.12. 边界 在本页89) ,则会显示相邻边界限值的 3D 表示。
安全平面以黄黑色呈现,带有一个表示安全平面正常的小箭头,指出安全平面上允许放置机
器人 TCP 的一侧。触发平面以蓝色和绿色显示,并带有一个指向平面一侧的小箭头,在这一
侧,
正常
模式限值( 请参阅1.21.6. 安全模式 在本页84) 处于激活状态。工具方向边界限值以锥
体呈现,带有一个指示机器人工具当前方向的矢量。锥体内侧代表工具方向的允许区域( 矢
量) 。
目标机器人 TCP 离开极限区域时,3D 成像消失。如果目标 TCP 违反边界限制或接近边界极
限,则成像会变成红色。
特 征 和 工 具 位 置
在屏幕右上角可找到特征选择器。特征选择器定义了用于控制机器人手臂相对应的特征
当前激活的工具中心点 (TCP) 的名称显示在特征选择器下方。有关配置多个指定 TCP 的更多
信息,请参阅1.24.6. 安装设置 → TCP 配置 在本页117。文本框显示了 TCP 相对于所选特征的
完整坐标值。X, Y and Z control the position of the tool, while RX, RY and RZ 控制工具的方向。
使用 RX, RY and RZ 框上方的下拉菜单选择方向表示形式。可用类型包括:
UR5 108 用 户 手 册
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。

• 旋转矢量[rad] 方向以
旋转矢量
形式给出。轴长是指要旋转的角度,以弧度表示,矢量
本身给定了要绕之旋转的轴。这是默认设置。
• 旋转矢量[
∘
] 方向以
旋转矢量
形式给出,其中,矢量的长度是要旋转的角度,以度为单
位。
• RPY [rad]
滚动角
、
俯仰角
和
偏航角
(
RPY
),以弧度为单位。RPY 旋转矩阵( X、Y'、Z'' 旋
转) 由以下公式确定:
Rrpy
(
γ
,
β
,
α
) =
RZ
(
α
) ⋅
RY
(
β
) ⋅
RX
(
γ
)
• RPY [
∘
]
滚动角
、
俯仰角
和
偏航角
(
RPY
),以度为单位。
单击坐标可编辑值。点击框右侧的 + or - 按钮可对当前值进行加/减操作。按住按钮将直接增
大/减小值。按住的时间越长,增大/减小的值越大。
关 节 位 置
允许直接指定各关节位置。每个关节位置的值可以在 − 360
∘
到 + 360
∘
范围内,这是
关节限
值
。单击关节位置可编辑值。点击框右侧的 + or - 按钮可对当前值进行加/减操作。按住按钮将
直接增大/减小值。按住的时间越长,增大/减小的值越大。
“确 定 ”按 钮
如果该屏幕是从Move tab (see1.24. 机器人控制 在本页111), clicking the OK button will return to the
Move选项卡激活的( 请参阅第 119 页上的“1.23. 机器人控制 ”) ,点击“确定”按钮将返回到“移动”
选项卡,在此机器人将移动到指定目标。如果最后一个指定值是工具坐标,机器人手臂将采用
MoveL
移动类型移动至目标位置;如果最后指定的是关节位置,则机器人手臂将采用
MoveJ
移
动类型移动至目标位置。移动类型 在本页149中介绍了不同的移动类型。
取 消 按 钮
点击Cancel按钮可离开屏幕,放弃所有更改。
用 户 手 册 109 UR5
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
UR5 110 用 户 手 册
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。