99312_UR5_User_Manual_zh_E67ON_Global.pdf - 第167页
( 例 如 , 通 过 为 特 定 路 点 指 定 高 级 设 置 ( 速 度 或 时 间 ) ) , 这 可 能 导 致 与 原 始 轨 迹 发 生 很 大 的 偏 离 , 如 图 16.8 所 示 。 如 果 您 需 要 在 不 同 速 度 之 间 交 融 并 且 不 接 受 此 偏 离 , 可 改 为 考 虑 使 用 M ov eL 的 笛 卡 尔 空 间 交 融 。 v1 v2 v1 << v2 WP_1 WP_2 …
WP_1
WP_2
WP_3
WP_1
WP_2
WP_3
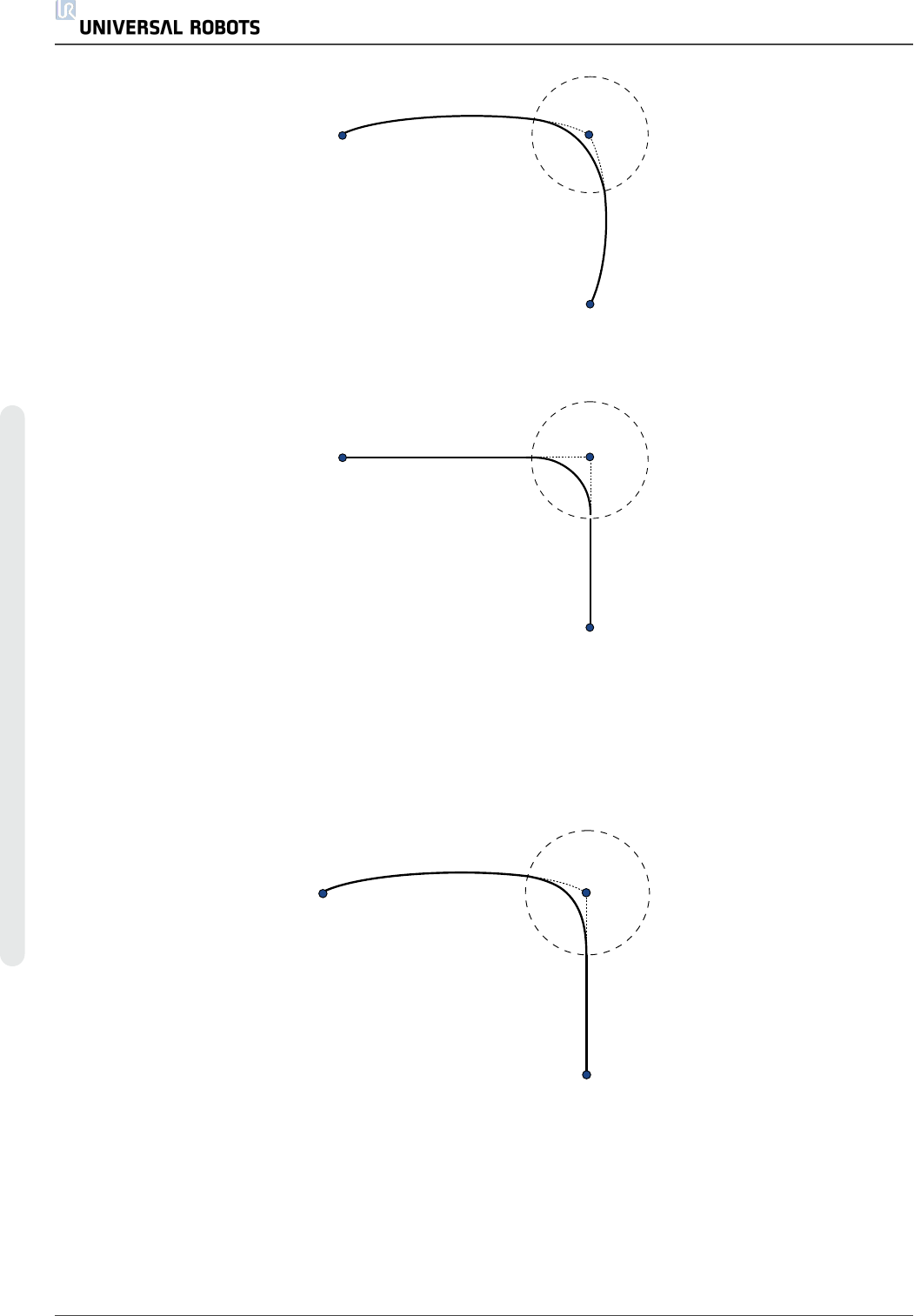
16.6:
关节空间 (MoveJ) 与笛卡尔空间 (MoveL) 运动和交融。
在不同组合中,第 2、3 和 4 点将产生保持在笛卡尔空间里的原始轨迹边界内的轨迹。不同轨
迹类型( 第 2 点) 之间的交融示例可参见图 16.7。
WP_1
WP_2
WP_3
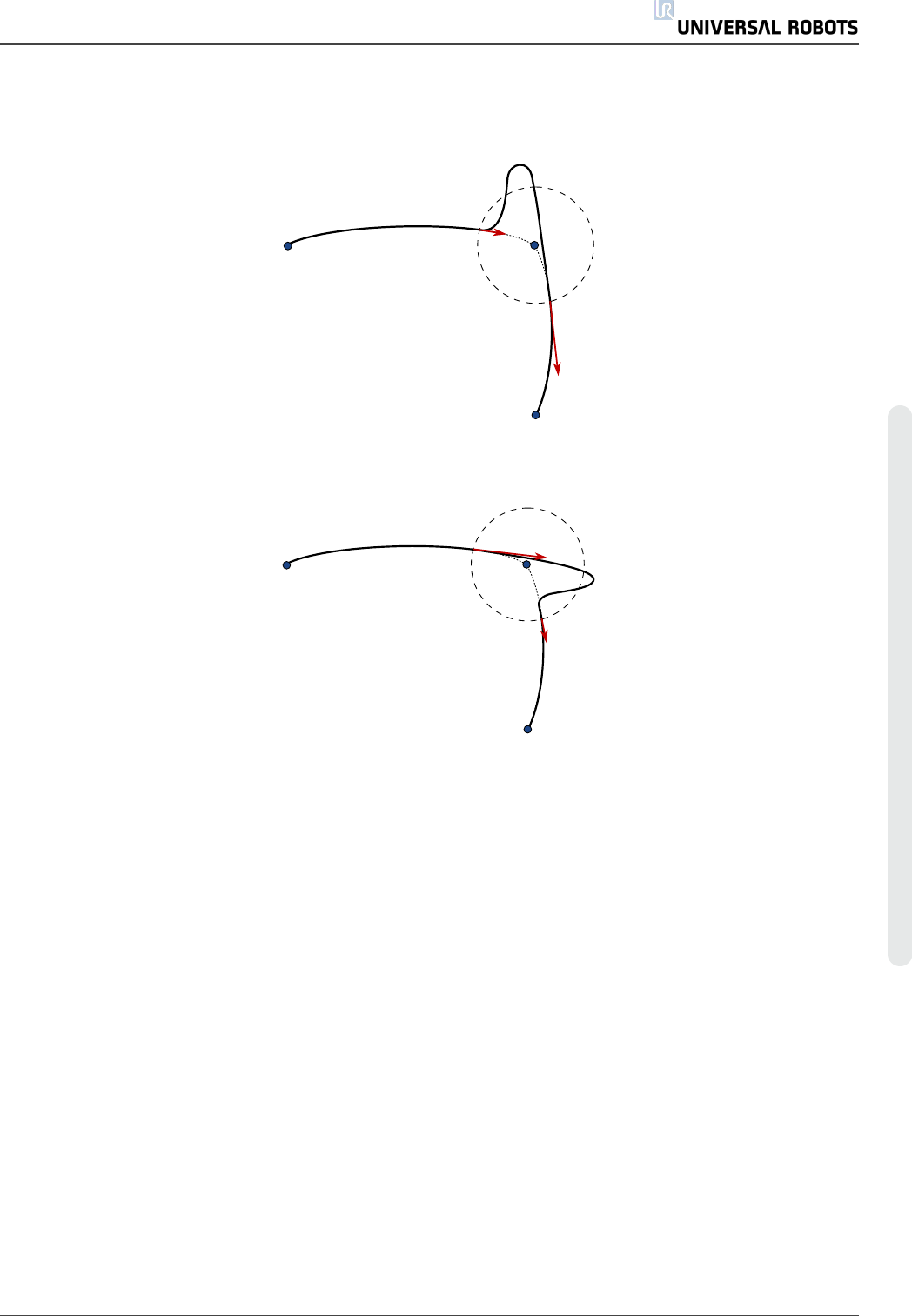
16.7:
从关节空间运动 (MoveJ) 到线性工具运动 (MoveL) 的交融。
但是,纯关节空间交融( 第 1 点) 可能会以不太直观的方式表现,因为机器人将设法在考虑速
度和时间要求的同时在关节空间中实现尽可能最平滑的轨迹。鉴于此,它们可能会偏离路点
指定的路线。尤其是在两个轨迹之间的关节速度存在明显差异时。
小心
:如果速度相差很大
UR5 156 用 户 手 册
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
( 例如,通过为特定路点指定高级设置( 速度或时间) ) ,这可能导致与原始轨迹发生很大的偏
离,如图 16.8 所示。如果您需要在不同速度之间交融并且不接受此偏离,可改为考虑使用
MoveL 的笛卡尔空间交融。
v1
v2
v1 << v2
WP_1
WP_2
WP_3
WP_1
WP_2
WP_3
v1
v2
v1 >> v2
16.8:
Joint space blending when initial velocity v1 is significantly smaller than final velocity v2 or the
opposite.
用 户 手 册 157 UR5
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
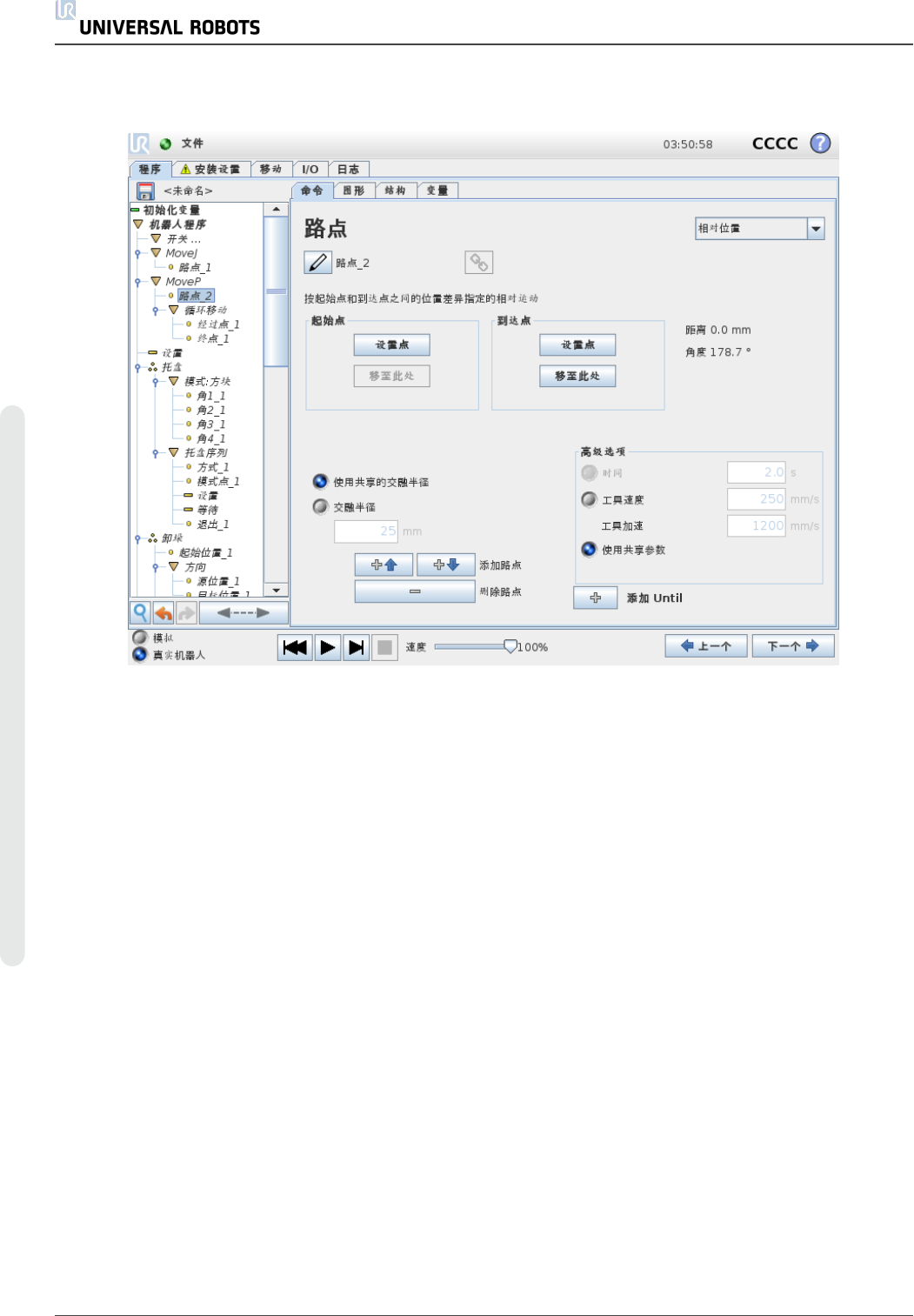
1.25.6. 命令:相对路点
相对路点是指该路点的位置是以相对于机器人手臂上一个位置的位置差的方式给出的,例如
“偏左两厘米”。相对位置定义为两个给定位置( 从左到右) 之间的差。
注意:重复的相对位置可能会将机器人手臂移出其工作空间。
这里的距离是指两个 TCP 位置之间的笛卡尔距离。角度说明两个位置之间 TCP 方向的变化幅
度。更准确地说,是指描述方向变化的旋转矢量的长度。
UR5 158 用 户 手 册
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。