99312_UR5_User_Manual_zh_E67ON_Global.pdf - 第222页
脱 模 器 向 前 使 脱 模 器 移 动 , 以 从 模 具 中 搬 运 出 工 件 。 使 用 时 机 器 人 的 位 置 应 已 准 备 就 绪 , 可 以 抓 取 工 件 。 使 用 复 选 框 可 启 用 / 禁 用 各 个 步 骤 。 U R5 2 12 用 户 手 册 EU ROMAP 6 7 I n ter face 版 权 所 有 © 2 009–2021U ni ver s al R obots A/S 。 保…
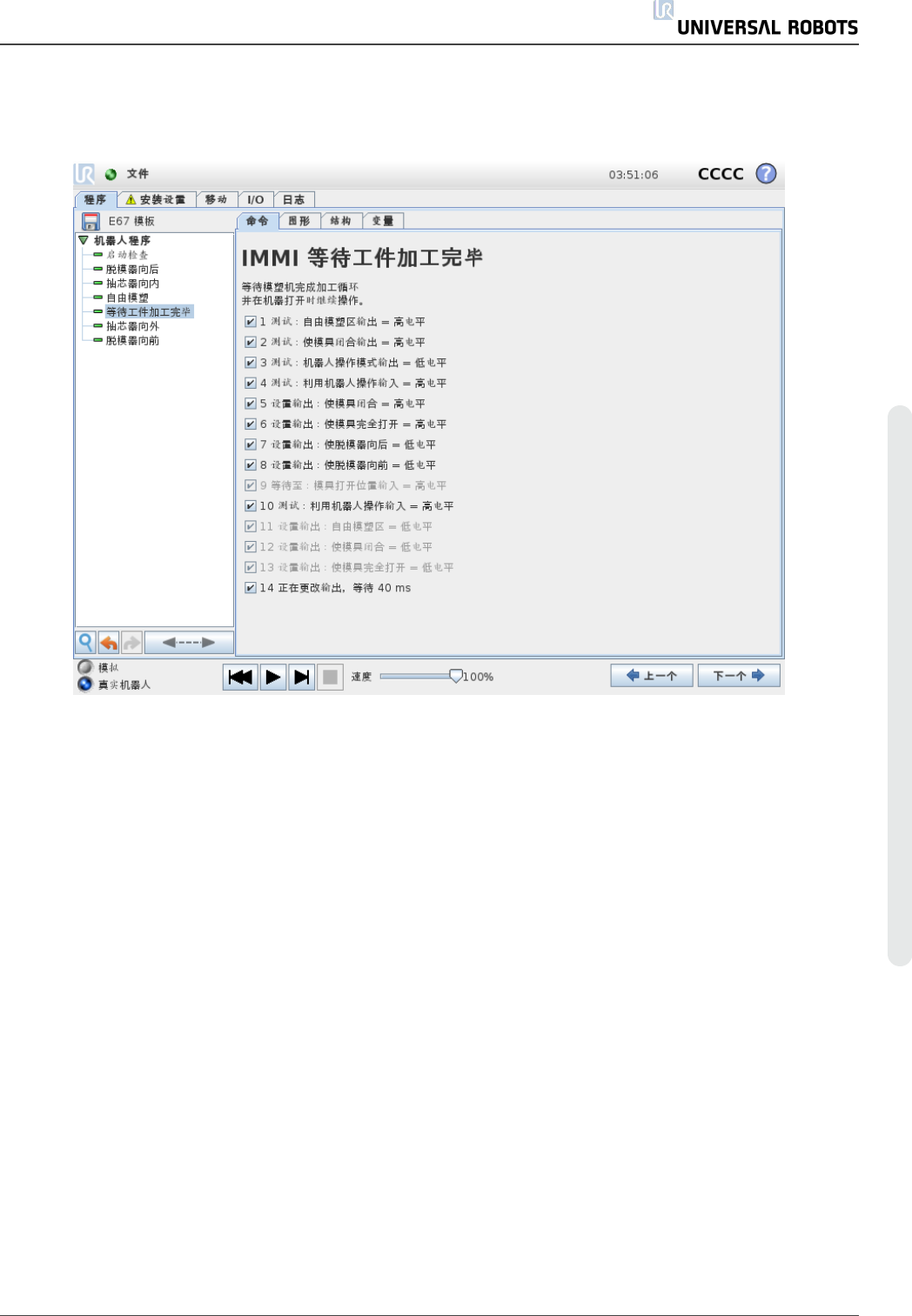
等 待 工 件 加 工 完 毕
用于让机器人等待 IMM 中的工件注塑就绪。使用复选框可启用/禁用各个步骤。
用 户 手 册 211 UR5
EUROMAP 67 Interface
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
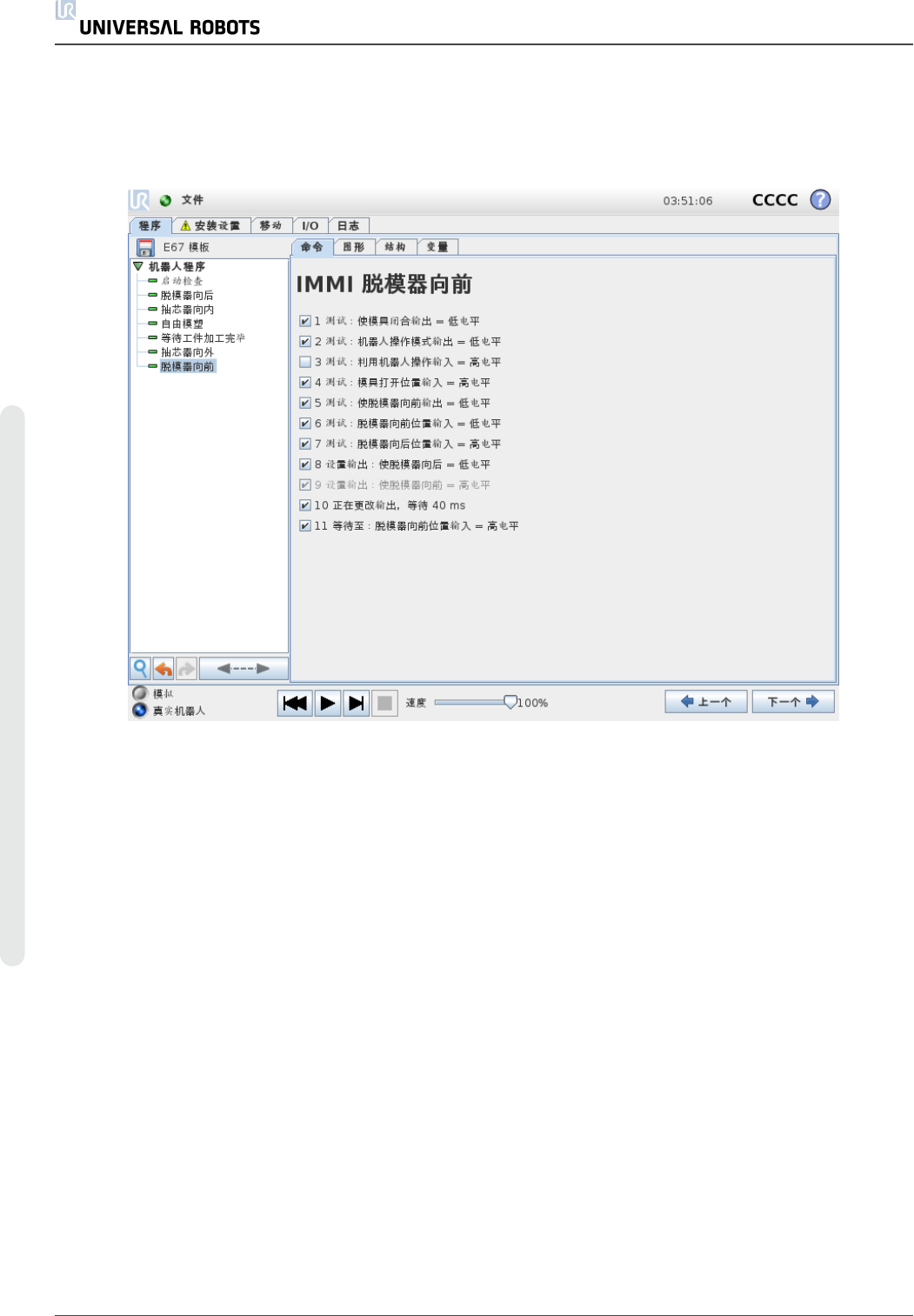
脱 模 器 向 前
使脱模器移动,以从模具中搬运出工件。使用时机器人的位置应已准备就绪,可以抓取工件。
使用复选框可启用/禁用各个步骤。
UR5 212 用 户 手 册
EUROMAP 67 Interface
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
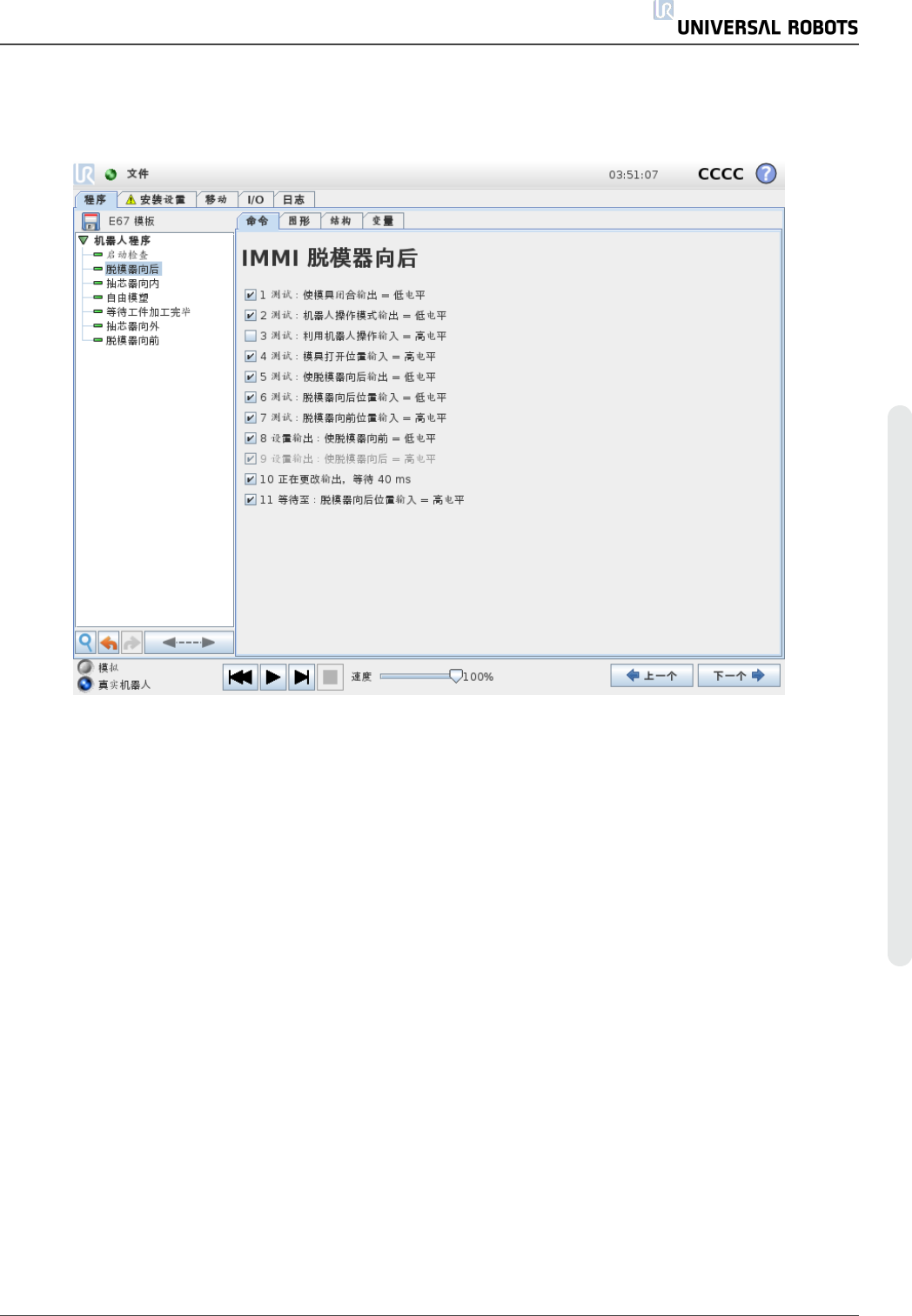
脱 模 器 向 后
使脱模器移到其向后位置。使用复选框可启用/禁用各个步骤。
用 户 手 册 213 UR5
EUROMAP 67 Interface
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。