99312_UR5_User_Manual_zh_E67ON_Global.pdf - 第49页
警 告 1. 连 接 工 具 和 夹 持 器 保 证 中 断 电 源 时 不 会 导 致 任 何 危 险 , 例 如 工 件 从 工 具 上 掉 落 。 2. 使 用 12V 电 源 时 要 特 别 小 心 , 因 为 编 程 员 出 错 可 能 会 导 致 电 压 变 为 24V , 从 而 可 能 损 坏 设 备 和 引 发 火 灾 。 提 示 工 具 法 兰 G N D 相 连 通 ( 与 红 线 相 同 ) 。 工 具 数 字 …
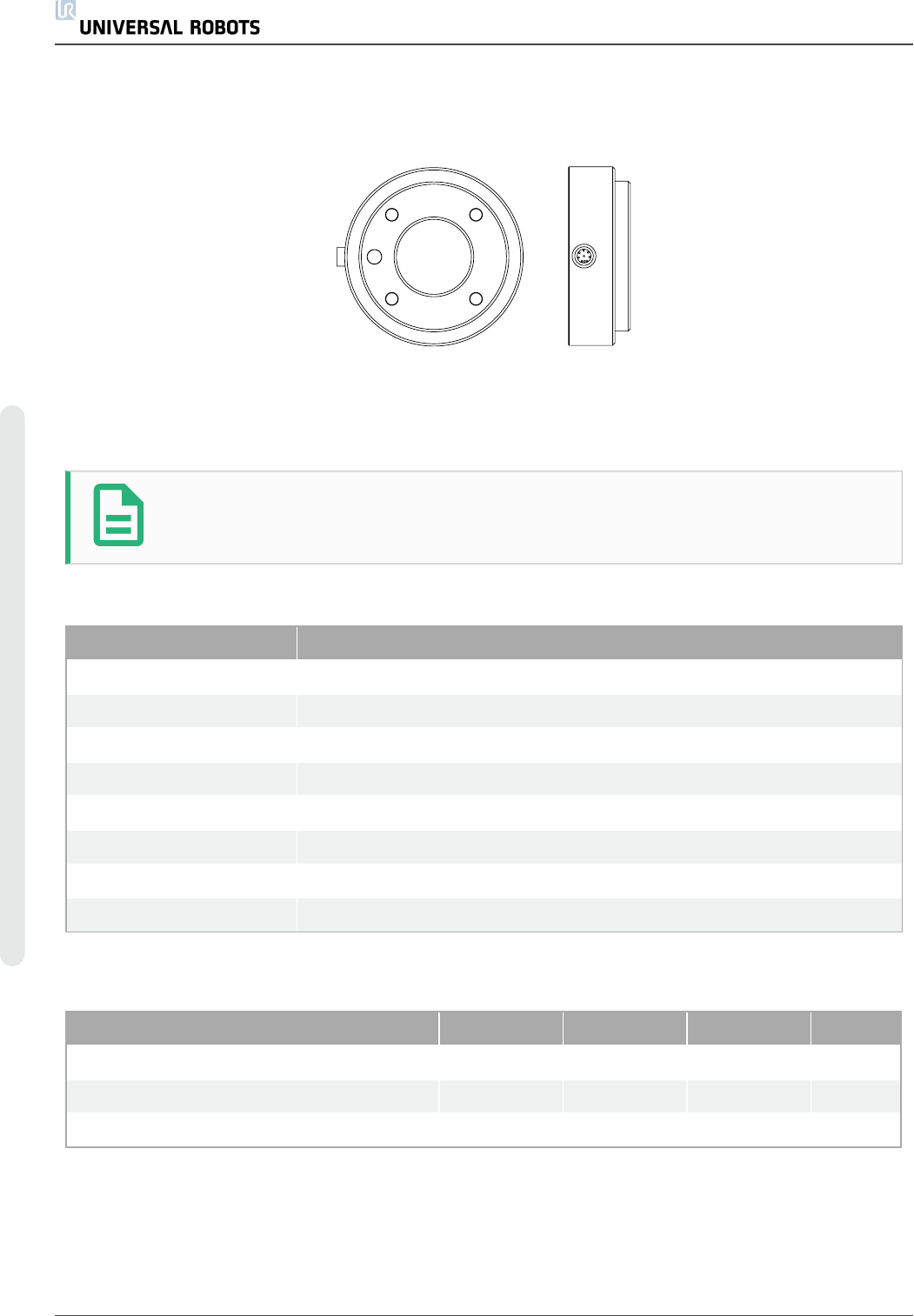
1.9.4. 工具 I/O
在机器人的工具端,有一个 8 引脚的小型连接器,请参见下图。
此连接器为特定机器人工具上使用的夹持器和传感器提供电源和控制信号。适合使用的工业
电缆如下:
• Lumberg RKMV 8-354。
提示
工具连接器必须手动拧紧,最大力矩 0.4Nm。
电缆内部的八条线有不同颜色,不同颜色代表不同功能,请参见下表:
颜色 信号
红色 0V (GND)
灰色 0V/+12V/+24V( 电源)
蓝色 工具输出 0 (TO0)
粉红色 工具输出 1 (TO1)
黄色 工具输入 0 (TI0)
绿色 工具输出 1 (TI1)
白色 模拟输入 2 (AI2)
棕色 模拟输入 3 (AI3)
可在 GUI 的 I/O 选项卡中将内部电源设置为 0V、12V 或 24V,请参阅第 II 部分PolyScope 手册
在本页79。电气规范如下所示:
参数 最小值 典型值 最大值 单位
24V 模式下的电源电压 - 24 - V
12V 模式下的电源电压 - 12 - V
两种模式下的电源电流* - - 600 mA
注意:*强烈建议为电感性负载使用保护二极管
后续章节将介绍工具的不同 I/O。
UR5 38 用 户 手 册
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
警告
1. 连接工具和夹持器保证中断电源时不会导致任何危险,例如工件从工具
上掉落。
2. 使用 12V 电源时要特别小心,因为编程员出错可能会导致电压变为 24V,
从而可能损坏设备和引发火灾。
提示
工具法兰 GND 相连通( 与红线相同) 。
工 具 数 字 输 出
数字输出以 NPN 的形式实现。数字输出激活后,相应的接头即会被驱动接通 GND,数字输出
端禁用后,相应的接头将处于开路( 开集/开漏) 。电气规范如下所示:
参数 最小值 典型值 最大值 单位
开路时的电压 -0.5 - 26 V
灌入 1A 电流时的电压 - 0.05 0.20 V
灌电流 0 - 600 mA
通过 GND 的电流 0 - 600 mA
下一小节中的示例显示了如何使用数字输出。
小心
1. 工具中的数字输出端没有电流限制,若超过所规定的数据,可能会导致
永久性损坏。
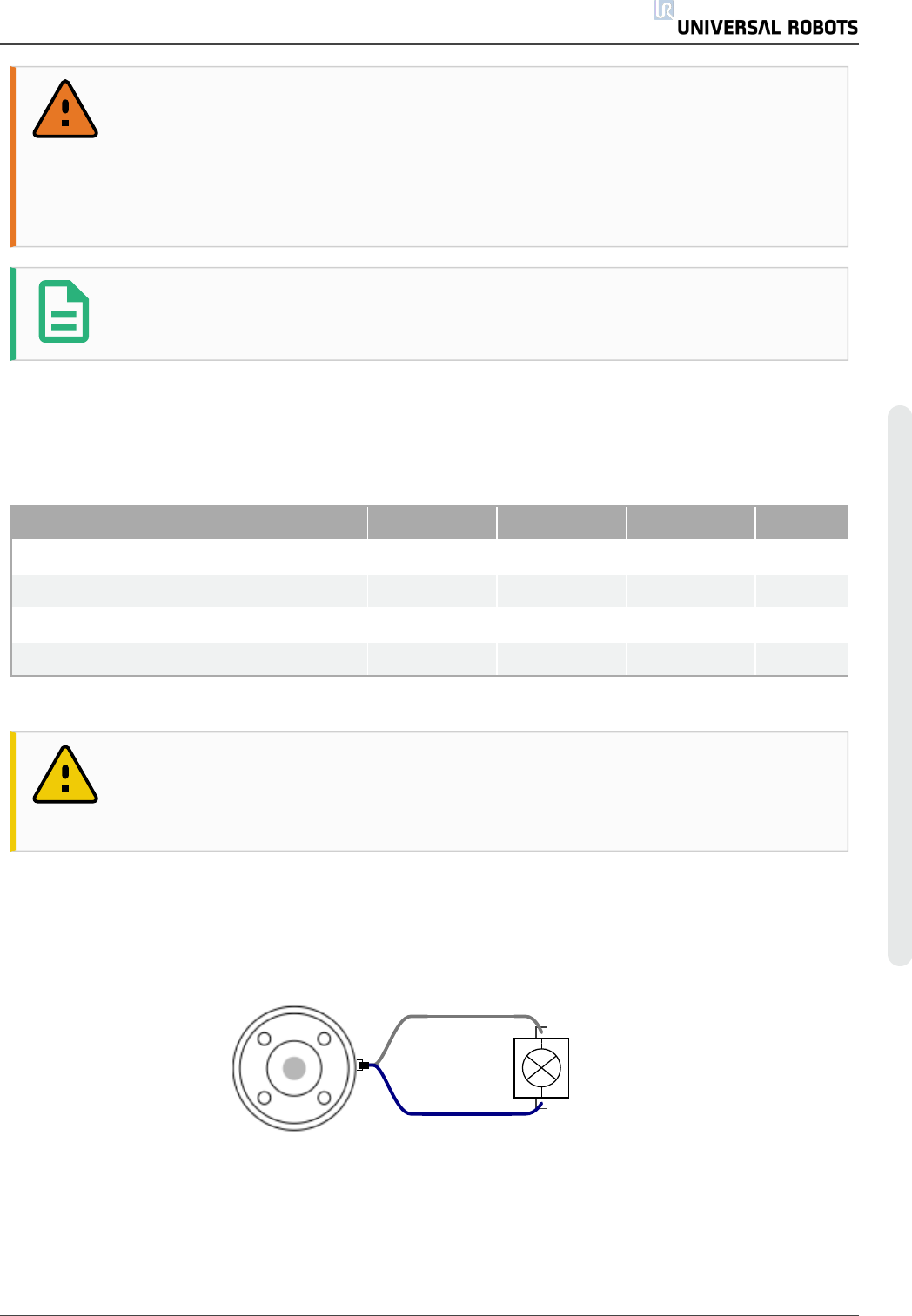
使 用 工 具 数 字 输 出
下例说明了如何在使用 12V 或 24V 的内部电源时打开负载。请记住,您必须要在 I/O 选项卡中
定义输出电压。并谨记,即使负载已关闭,电源接头和防护罩/地面之间仍存在电压。
TO0
POWER
注意:强烈建议为电感性负载使用保护二极管,如下所示。
用 户 手 册 39 UR5
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
TO0
POWER
工 具 数 字 输 入 端
数字输入以配有弱下拉电阻器的 PNP 的形式实现。这意味着浮置输入的读数始终为低。电气
规范如下所示。
参数 最小值 典型值 最大值 单位
输入电压 -0.5 - 26 V
逻辑低电压 - - 2.0 V
逻辑高电压 5.5 - - V
输入电阻 - 47k - Ω
下一小节中的示例显示了如何使用数字输入。
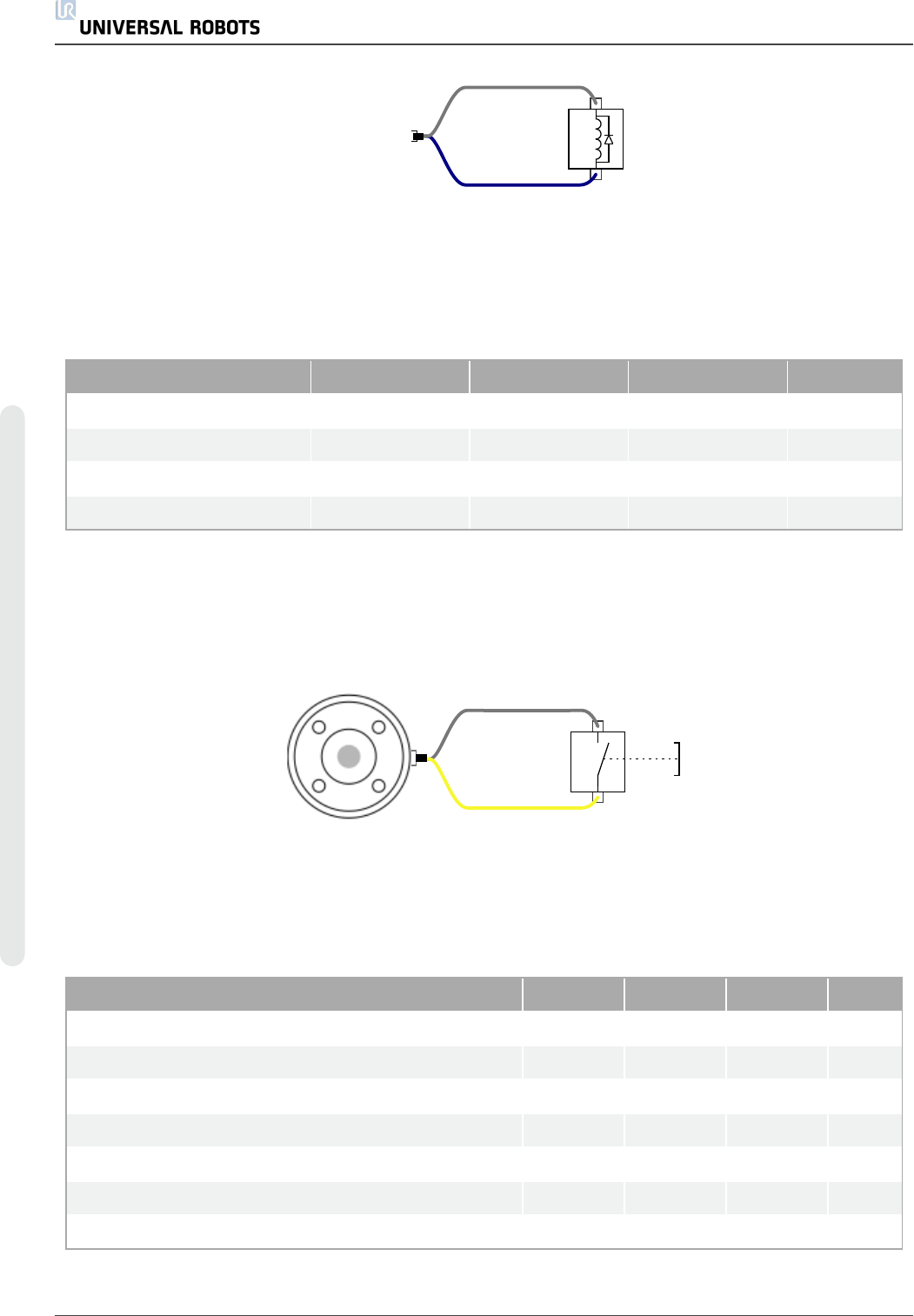
使 用 工 具 数 字 输 入
下例显示了简单按钮的连接方法。
TI0
POWER
工 具 模 拟 输 入
工具模拟输入为非差分输入,可在 I/O 选项卡上设置为电压和电流,请参阅第 II 部分PolyScope
手册 在本页79。电气规范如下所示。
参数 最小值 典型值 最大值 单位
电压模式下的输入电压 -0.5 - 26 V
0V 至 10V 电流范围内的输入电阻 - 15 - kΩ
分辨力 - 12 - 位
电流模式下的输入电压 -0.5 - 5.0 V
电流模式下的输入电流 -2.5 - 25 mA
4mA 至 20mA 电流范围内的输入电阻 - 200 - Ω
分辨力 - 12 - 位
下面的章节中举出了两个关于如何使用模拟输入的示例。
UR5 40 用 户 手 册
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。