99312_UR5_User_Manual_zh_E67ON_Global.pdf - 第153页
此 选 项 卡 提 供 了 一 种 非 常 简 便 的 机 器 人 手 臂 和 控 制 箱 操 作 方 法 , 使 用 尽 可 能 少 的 几 个 按 钮 和 选 项 即 可 完 成 操 作 , 这 可 与 保 护 P o ly S c ope 编 程 部 分 的 密 码 ( 请 参 阅 1.2 6.3. 设 置 密 码 在 本 页 196 ) 有 效 结 合 , 使 机 器 人 成 为 一 个 可 以 专 门 运 行 预 先 编 写 …
文件字段
此处将显示当前所选的文件。用户可以点击字段右侧的键盘图标手动键入文件名称。屏幕键
盘会跳出,用户可以直接在屏幕上输入文件名。
打开按钮
单击打开按钮可打开当前所选文件并返回上一个屏幕。
取消按钮
单击取消按钮可终止当前的加载进程,并促使屏幕跳回前一页面。
操作按钮
一系列按钮让用户可以进行一些操作,这些操作以往一般需要用户在传统的文件对话框中鼠
标右键点击文件名才会跳出。此外,还可以在目录结构中直接向上访问程序文件夹。
• 父目录:在目录结构中上移。该按钮在两种情况下不会启用:当前文件夹是顶级目录;或
屏幕在受限模式且当前目录是程序文件夹。
• 转至程序文件夹:返回主目录
• 操作:创建目录、删除文件等操作。
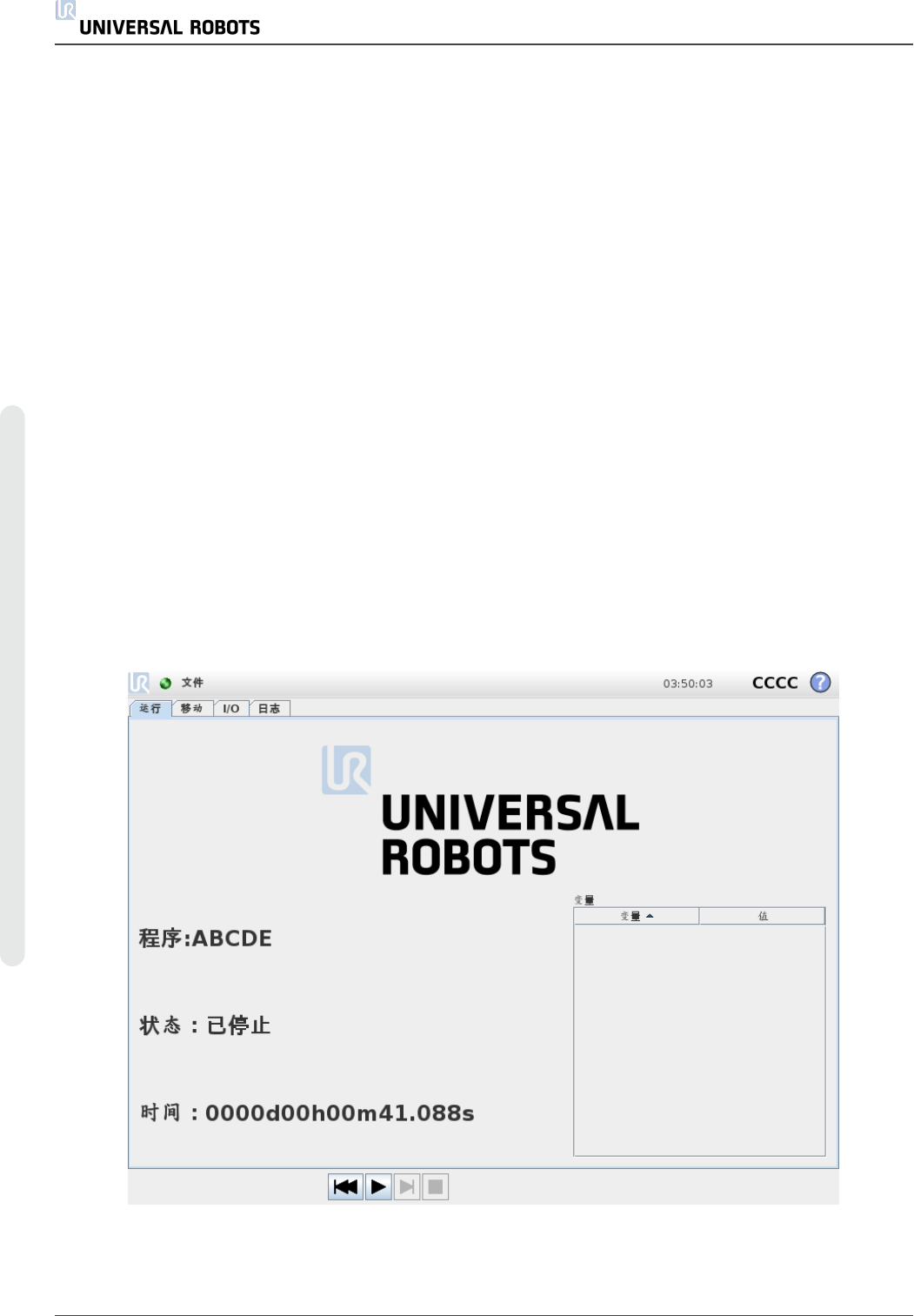
1.24.18. 运行选项卡
UR5 142 用 户 手 册
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
此选项卡提供了一种非常简便的机器人手臂和控制箱操作方法,使用尽可能少的几个按钮和
选项即可完成操作,这可与保护 PolyScope 编程部分的密码( 请参阅1.26.3. 设置密码 在本页
196) 有效结合,使机器人成为一个可以专门运行预先编写的程序的工具。
此外,在此选项卡中,可以根据外部输入信号沿过渡自动加载和启动默认程序( 请参阅1.24.15.
安装设置 → 默认程序 在本页138) 。自动加载和启动默认程序,开机时自动初始化等,可以用
于将机器人手臂整合进其他机器。
用 户 手 册 143 UR5
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
UR5 144 用 户 手 册
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。