99312_UR5_User_Manual_zh_E67ON_Global.pdf - 第108页
1. 停 机 类 别符 合 ISO 138 49-1 , 请 参 见 术 语 表 了 解 更 多 详 细 信 息 。 ↩ U R5 9 8 用 户 手 册 版 权 所 有 © 2 009–2021U ni ver s al R obots A/S 。 保 留 所 有 权 利 。
提示
• 在启用了 3 档位使动装置的安全 I/O 配置得到确认后,将自动显示“欢迎”
屏幕。当操作模式从
编程
变为
运行
时,也会自动显示“欢迎”屏幕。
• 物理模式选择器( 如果使用) 必须完全符合 ISO 10218-1:第 5.7.1 条的选
择。
• 3 档位开关及其特性、性能特点及操作必须完全符合 ISO 10218-1:5.8.3
的启用装置。
输 出 信 号
对于输出信号,可以应用以下
安全功能
。触发高信号的状态结束时,所有信号恢复成低信号:
System Emergency Stop
只有当安全系统被“机器人紧急停止”输入或“紧急停止”按钮触发到“紧急停止”状态时,才会发
出低电平信号。为避免死锁,如果“系统紧急停止”输入触发了“紧急停止”状态,则不会发出低
电平信号。
提示
通过“系统紧急停止”输出从机器人获得“紧急停止”状态的外部机械必须符合
ISO 13850。这在“机器人紧急停止”输入连接到外部紧急停止装置的设置中尤为
必要。在这种情况下,当外部紧急停止装置被释放时,“系统紧急停止”输出将变
成高电平。这意味着外部机械的紧急停止状态将被重置,而不需要来自机器人
操作员的手动操作。因此,为了符合安全标准,外部机械必须采取手动操作才
能恢复。
Robot Moving
只要机器人手臂在移动状态就给出弱信号。机器人手臂处于固定位置时,给出强信号。
Robot Not Stopping
当由于紧急停止或防护停止而使机器人停止或处于停止过程中时,信号为逻辑高电平。信号
为逻辑低电平。
Reduced Mode
当机器人手臂处于
缩减
模式或安全输入配置了Reduced Mode输入且当前信号为低电平时,
将发送低电平信号。否则信号为高信号。
Not Reduced Mode
这与上面定义的Reduced Mode相反。
用 户 手 册 97 UR5
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
1. 停机类别符合 ISO 13849-1,请参见术语表了解更多详细信息。↩
UR5 98 用 户 手 册
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
1.22. 开始编程
1.22.1. 前言
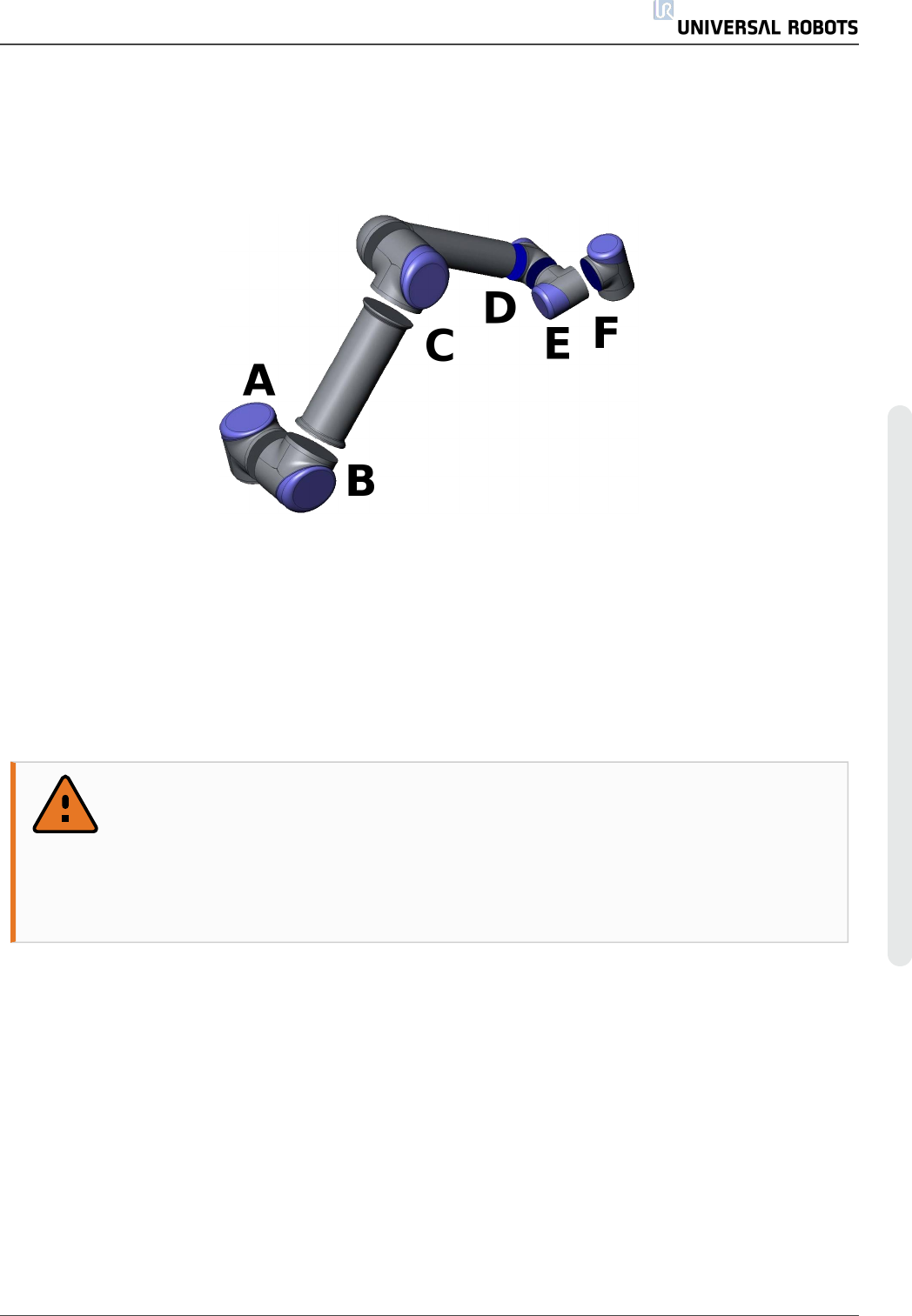
13.1:
机器人关节A:机座,B:肩部,C:肘部,D、E、F:手腕 1、2、3
UR 机器人手臂由挤压铝管和关节组成。这些关节及其常用名称如图 13.1 所示。机座是机器人
的安装位置,机器人的另一端( 手腕 3) 与机器人的工具相连。通过协调每一个关节的活动,除
了基座正上方及正下方的区域以外,机器人可以自由地移动工具。
PolyScope 是一个图形用户界面 (GUI),可用于操作机器人手臂和控制箱,执行机器人程序,以
及轻松创建新程序。
下一节介绍机器人入门知识。之后将对屏幕及 PolyScope 的功能做更加详尽的介绍。
警告
1. 硬件安装手册包含重要的安全信息,在机器人第一次通电前,UR 机器人
的集成商必须阅读并理解这些信息。
2. 在机器人手臂第一次通电前,集成商必须设置风险评估定义的安全配置
参数,请参阅1.21. 安全配置 在本页81一章。
1.22.2. 使用入门
使用 PolyScope 之前,必须先安装机器人手臂和控制箱,将控制箱接通电源。
安 装 机 器 人 手 臂 和 控 制 箱
请按照以下步骤安装机器人手臂和控制箱:
1. 开箱取出机器人手臂和控制箱。
2. 将机器人安装在一 个坚固的表面,该表面应当足以承受至少 10 倍的机座关节的完全扭
转力,以及至少 5 倍的机器人手臂的重量。该表面必须是防震的。
用 户 手 册 99 UR5
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。