99312_UR5_User_Manual_zh_E67ON_Global.pdf - 第20页
7. 因 机 器 人 有 效 载 荷 与 坚 固 表 面 之 间 的 冲 击 而 导 致 扭 伤 或 骨 折 。 8. 因 用 于 固 定 机 器 人 手 臂 或 工 具 / 末 端 执 行 器 的 螺 栓 松 动 而 导 致 的 后 果 。 9. 物 品 从 工 具 / 末 端 执 行 器 上 掉 落 , 例 如 因 夹 持 不 到 位 或 断 电 引 起 。 10. 因 不 同 机 器 上 紧 急 停 止 按 钮 不 同 而 出 现…
• 在机器人安装的设置和开发过程中示教机器人
• 故障诊断和维护
• 机器人安装的正常操作
风险评估必须在机器人手臂第一次通电之前进行。由集成商执行的风险评估的一部分就是识
别正确的安全配置设置,以及对额外的紧急停止按钮和/或特定机器人应用所需的其他防护措
施的需要。
识别正确的安全配置设置是开发合作机器人应用的一个尤为重要的部分。有关详细信息,请
参阅1.6. 安全相关的功能和接口 在本页13一章和第 II 部分PolyScope 手册 在本页79。
一些安全相关功能专门设计用于合作机器人应用。这些功能可通过安全配置设置进行配置,
在处理集成商执行的风险评估中发现的特定风险时尤为重要:
• 力和功率限制:用于在机器人与操作员发生碰撞时减小机器人在移动方向上施加的夹紧
力和压力。
• 动量限制:用于在机器人与操作员发生碰撞时通过降低机器人的速度来减小高瞬态能量
和冲击力。
• TCP 和工具/末端执行器位置限制:专门用于降低与某些身体部位相关的风险。例如,避
免朝着头部和颈部移动。
• TCP 和工具/末端执行器方向限制:专门用于降低与工具/末端执行器和工件的某些区域
和特征相关的风险。例如,避免锐利的棱边指向操作员。
• 速度限制:专门用于确保机器人手臂低速移动。
集成商必须防止未授权人员通过使用密码保护更改安全配置。
需针对故意接触和/或由于可合理预见的误用导致的接触进行协作机器人应用风险评估,必须
考虑:
• 个体潜在碰撞的严重性
• 个体潜在碰撞出现的可能性
• 避免个体潜在碰撞的可能性
如果机器人安装在一个无法通过使用内置的安全相关功能合理消除危险或充分降低风险的非
协作机器人应用中( 例如,使用的危险工具/末端执行器时) ,集成商执行的风险评估必须判定
增加额外防护措施的必要性( 例如,一台用于在设置和编程过程中对操作员提供保护的使动
装置) 。
Universal Robots 明确了如下集成商必须要考虑的重大危险。
注意:特定机器人安装可能还会存在其他重大危险。
1. 手指夹在机器手臂电缆连接器和底座之间( 关节 0) 。
2. 手指夹在机器人足部和底座之间( 关节 0) 。
3. 手指夹在机器人手腕 1 和机器人手腕 2( 关节 3 和关节 4) 之间。
4. 工具/末端执行器或工具/末端执行器连接器上的锐边和尖点刺伤皮肤。
5. 机器人轨迹附近障碍物上的锐边和尖点刺伤皮肤。
6. 由于接触机器人而被擦伤。
用 户 手 册 9 UR5
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
7. 因机器人有效载荷与坚固表面之间的冲击而导致扭伤或骨折。
8. 因用于固定机器人手臂或工具/末端执行器的螺栓松动而导致的后果。
9. 物品从工具/末端执行器上掉落,例如因夹持不到位或断电引起。
10. 因不同机器上紧急停止按钮不同而出现的操作错误。
11. 因对安全配置参数的未授权更改而出现的错误。
有关停止时间和停止距离的信息,请参阅1.6. 安全相关的功能和接口 在本页13一章和1.14. 制
动时间和制动距离 在本页51附录。
1.5.8. 紧急停止
激活紧急停止按钮,立即停止机器人的一切运动。
注意:根据 IEC 60204-1 和 ISO 13850,紧急设备不是安全防护装置。它们是补充性防护措施,
并不用于防止伤害。
机器人应用的风险评估应确定是否需要更多紧急停止按钮。紧急停止按钮必须符合 IEC
60947-5-5( 请参阅安全 I/O在本页30一节) 。
1.5.9. 有电力驱动和无电力驱动的移动
在极少发生的紧急情况中,可能需要在机器人电源失效或不想使用电源的情况下移动一个或
多个机器人关节,这可以通过以下两种不同方法来迫使机器人关节移动:
提示
注意:在维修时,无需连接电源就可以释放接头上的制动器。
1. 强制反向驱动:用力推动或拉动机器人手臂,迫使关节移动。每个关节制动器均有一个
摩擦离合器,可使关节在承受高强度扭矩的情况下移动。
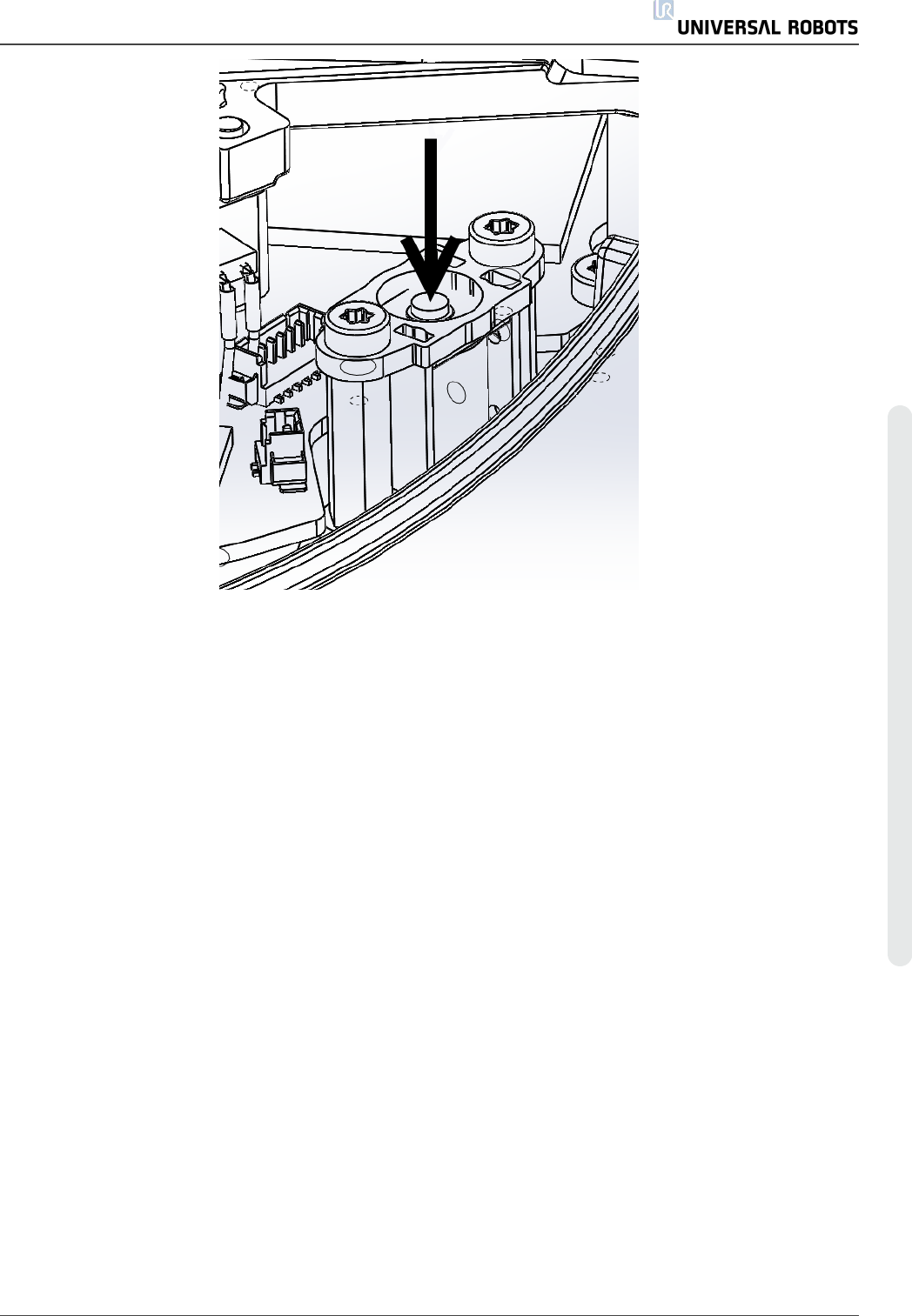
2. 手动松开制动器:卸下用于固定关节盖的几颗 M3 螺丝,拆卸关节盖。按小型电磁铁( 如
下图所示) 中的活塞,松开制动器。
警告
1. 手动移动机器手臂仅限于紧急情况,并且有可能会损坏关节。
2. 如果手动释放了制动器,万有引力可能会导致机器手臂掉落。释放制动
器时务必支撑住机器手臂、工具/末端执行器和工件。
UR5 10 用 户 手 册
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
用 户 手 册 11 UR5
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。