99312_UR5_User_Manual_zh_E67ON_Global.pdf - 第228页
参 数 最 小 值 典 型 值 最 大 值 单 位 24V 电 压 公 差 -15% - + 20 % - 24V 电 源 可 提 供 的 电 流 - - 2.0 * A 过 载 保 护 - 2. 2 - A [M AF- MAF] 断 开 连 接 时 的 电 压 0 12 12 .5 V [M AF- MAF] 连 接 时 的 电 流 0 57 70 mA [M AF- MAF] 连 接 错 误 保 护 - 400 - mA [M A…
• GUI 将重启。
• 确认新的安全设置。
• EUROMAP 67 现已安装,可随时使用。
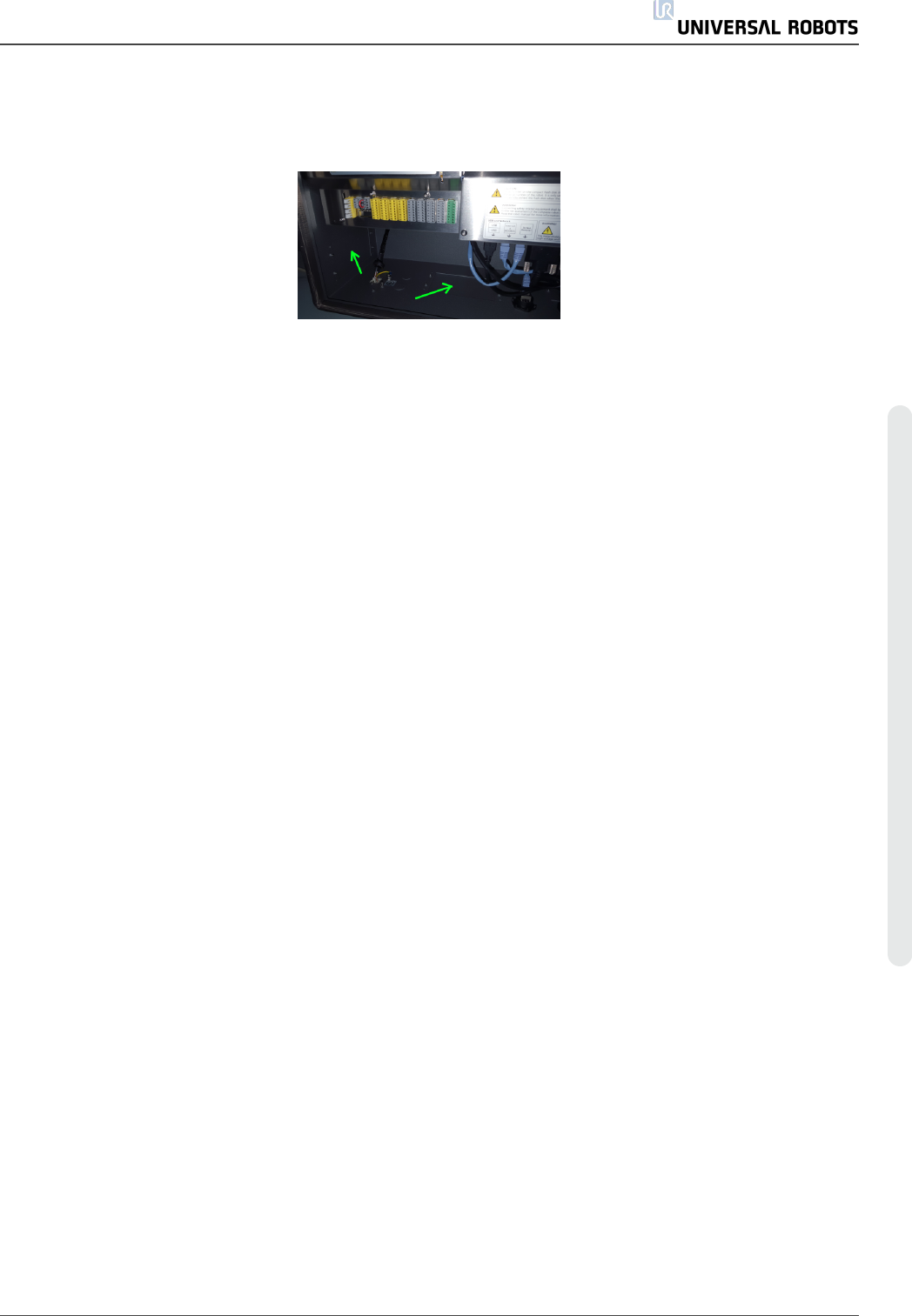
18.2:
控制箱中的接口布局
1.30.2. 卸载
请遵循以下程序。
1. 切断控制箱电源。
• 示教盒电源按钮的绿灯必须熄灭。
2. 拆卸接口。
• 拆卸带状电缆。
• 从接地连接器上卸下 M6 螺母。
• 从控制箱外部卸下所有 M4 螺丝。
3. 打开控制箱电源。
• 机器人安全系统报告 EUROMAP 67 已在机器人安装中定义,但在系统中检测不
到。转至“安装设置”、“安全”和“其他”,然后取消选中
Euromap67
复选框。
• 按
保存并重启
按钮。
• GUI 将重启。
• 确认新的安全设置。
• EUROMAP 67 现已卸载。
1.31. 电气特性
以下小节所介绍的信息对机器制造商和调试人员非常实用。
1.31.1. MAF 安全光幕接口
安全光幕与 Euromap 67 电缆中的 24V [ZA9-ZC9] 共用 24V 电源。不过,控制箱输入信号属于
低电流类型,因此大多数电流都可用。建议将电流负载保持在 1.2A 以下。24V 电流和电压显示
在 Euromap 67 I/O 选项卡中。
两个 MAF 信号端必须连接到无源开关触点。当“自由模塑区( 软件) ”位处于关闭状态时,MAF
信号的电压/电流将为 0V/0mA。
用 户 手 册 217 UR5
EUROMAP 67 Interface
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
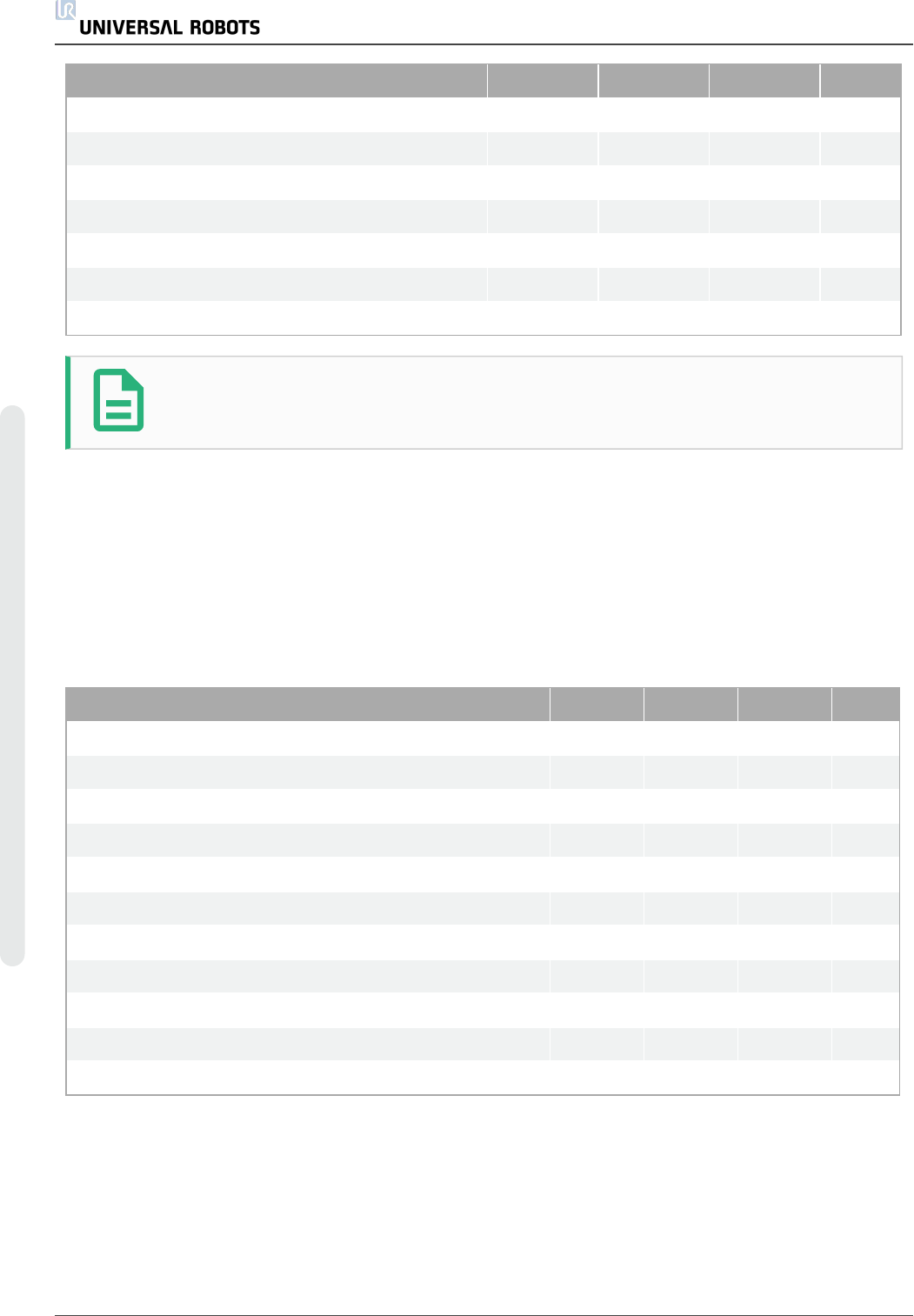
参数 最小值 典型值 最大值 单位
24V 电压公差 -15% - +20% -
24V 电源可提供的电流 - - 2.0* A
过载保护 - 2.2 - A
[MAF-MAF] 断开连接时的电压 0 12 12.5 V
[MAF-MAF] 连接时的电流 0 57 70 mA
[MAF-MAF] 连接错误保护 - 400 - mA
[MAF-MAF] 连接错误保护 -18 - 30 V
提示
“MAF 安全光幕接口”信号与控制箱防护罩并未进行电位隔离。
1.31.2. 紧急停止、安全装置和 MAF 信号
向 IMM 发送紧急停止信号和 MAF 信号的信号端由符合 EN 50205 标准的强制性安全继电器进
行控制。开关触点与所有其他信号端进行电位隔离,且符合 IEC 60664-1 和 EN 60664-1 的有关
规定,污染等级为 2,过电压类别为 III。
向机器人发送紧急停止信号和防护停止( 安全装置) 信号的信号端连接至控制箱的电势端接
子。
参数 最小值 典型值 最大值 单位
[C1-C2][C3-C4] 电压 10.2 12 12.5 V
[C1-C2][C3-C4] 电流( 每个输出) - - 120 mA
[C1-C2][C3-C4] 电流保护 - 400 - mA
[A1-A2][A3-A4] 输入电压 -30 - 30 V
[A1-A2][A3-A4] 确保关闭的条件 -30 - 7 V
[A1-A2][A3-A4] 确保打开的条件 10 - 30 V
[A1-A2][A3-A4] 确保关闭的条件 0 - 3 mA
[A1-A2][A3-A4] 打开电流 (10-30V) 7 - 14 mA
[A1-C1][A2-C2][A3-C3] 交流/直流电流 0.01 - 6 A
[A1-C1][A2-C2][A3-C3] 直流电压 5 - 50 V
[A1-C1][A2-C2][A3-C3] 交流电压 5 - 250 V
1.31.3. 数字输入
数字输入以 pnp 的形式工作且与控制箱耦合连接。这些输入符合 IEC 61131-2 和 EN 61131-2
标准中所定义的所有三种数字输入端的有关规定,这意味着它们可以和这些标准中所定义的
所有类型的数字输出端一起工作。
UR5 218 用 户 手 册
EUROMAP 67 Interface
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
参数 最小值 典型值 最大值 单位
输入电压 -30 24 30 V
确保关闭输入的条件 -30 - 7 V
确保打开输入的条件 10 - 30 V
确保关闭的条件 0 - 5 mA
打开电流 (10-30V) 6 - 10 mA
1.31.4. 数字输出
数字输出端以 pnp 的形式工作且与 IMM 耦合连接。IMM 与机器人电势端接子之间的电位隔离
符合 IEC 60664-1 和 EN 60664-1 的有关规定,污染等级为 2,过电压类别为 II。这些输出端在构
造上符合 IEC 61131-2 和 EN 61131-2 标准中所定义的所有三种数字输入端的有关规定,并满
足这些标准对数字输出端的所有要求。
数字输出端利用 IMM 24V 电源提供的数毫安电流控制并加偏压于晶体管,从而形成固态继电
器。
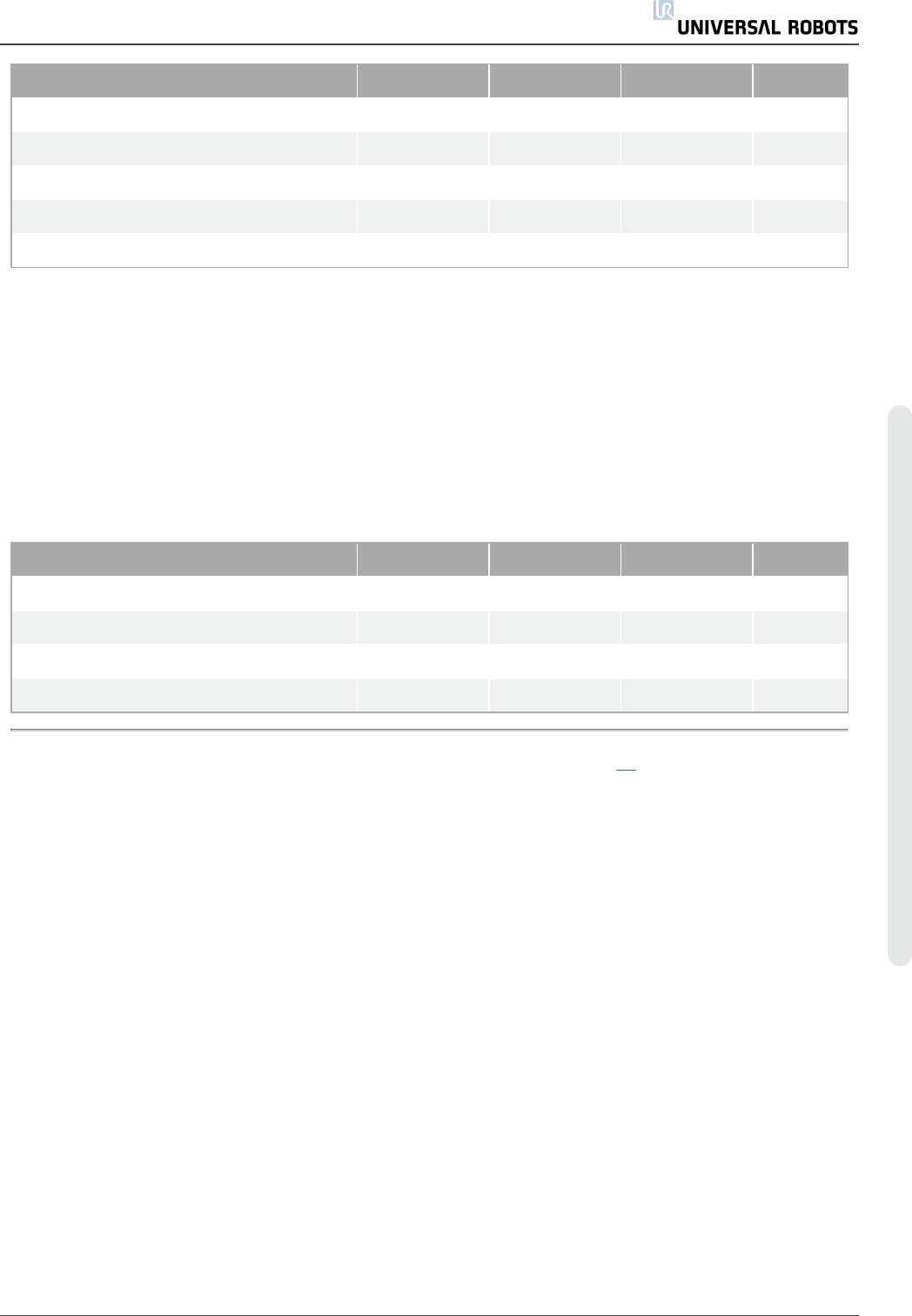
参数 最小值 典型值 最大值 单位
每个输出端的拉电流 0 - 120 mA
打开时的压降 0 0.1 1 V
关闭时的泄漏电流 0 0 0.1 mA
利用的 IMM 24V 电流 - 12 25 mA
1. 停机类别符合 ISO 13849-1,请参见术语表了解更多详细信息。↩
用 户 手 册 219 UR5
EUROMAP 67 Interface
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。