Smart Gui - Algorithm Training Material_rev1.pdf - 第25页
Copyright © ViT rox All Rights Reserved . 25 CR T ype Algorithm - Joint (2D Only) 1. Fill Pad ● Fill pads is used when the pads are very flat, and hence when lighted with the default lighting do not come up bright. This …
Copyright © ViTrox All Rights Reserved.
24
CR Type Algorithm - Joint
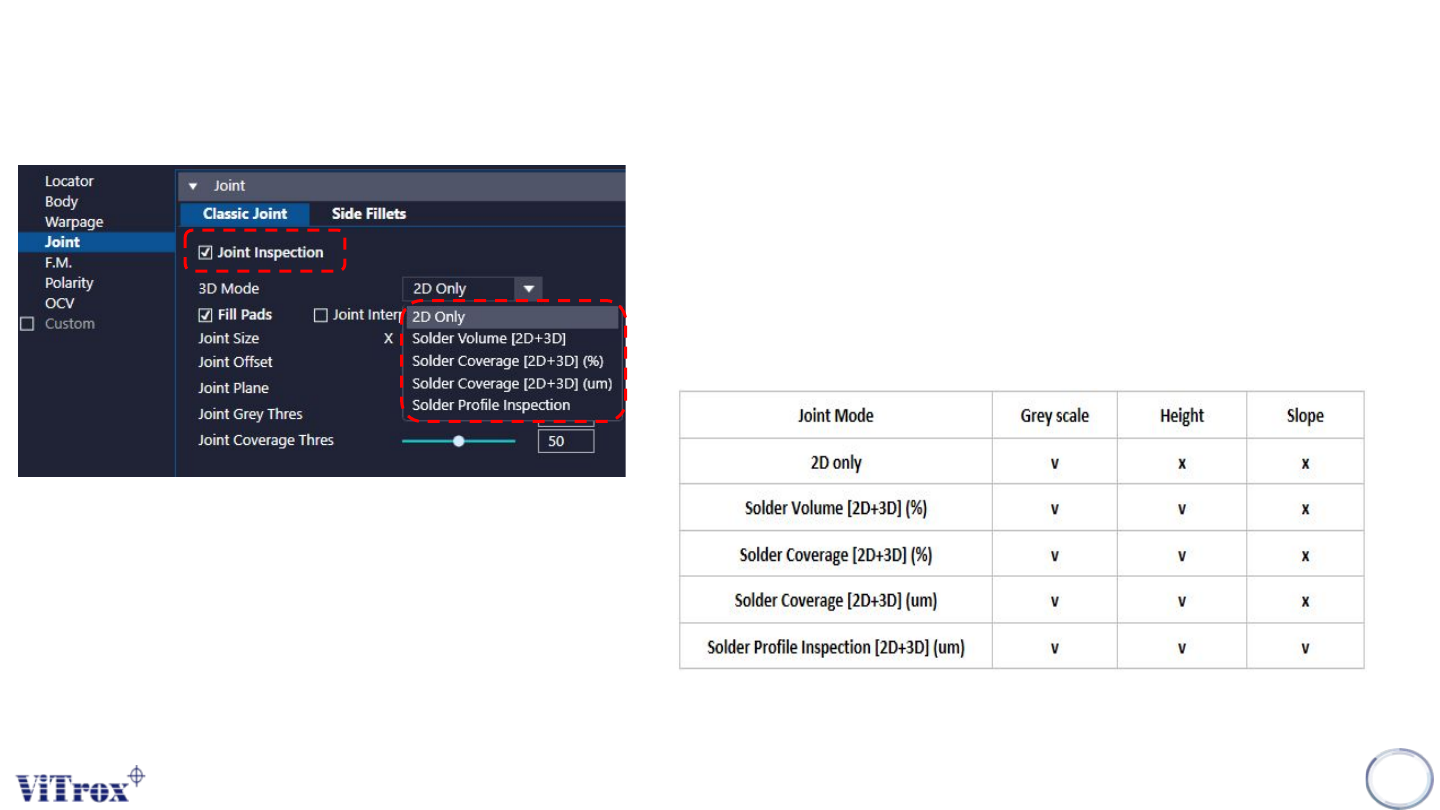
1. Joint Inspection
● Tick this to enable joint Inspection
2. 3D Mode
● Consists of 4 mode.
● The main differences between the 2D only and 3D for joint
inspection are the height while solder profile has additional
feature to check slope of joint.
Copyright © ViTrox All Rights Reserved.
25
CR Type Algorithm - Joint (2D Only)
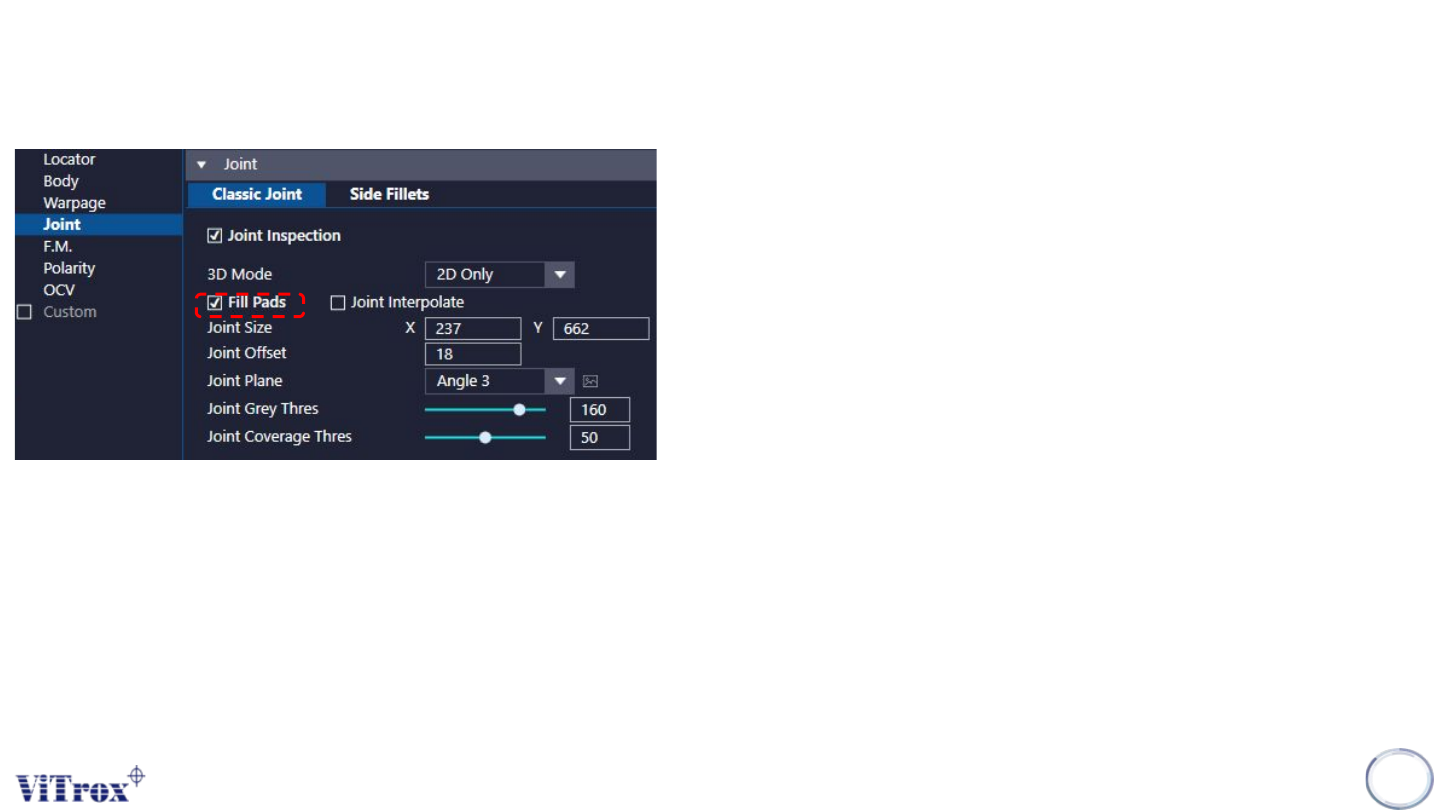
1. Fill Pad
● Fill pads is used when the pads are very flat, and hence when
lighted with the default lighting do not come up bright. This can
cause insufficient pads to pass.
● Fill pads would be useful for the 3rd joint down on this image. It
is very dull as it is low on solder and the pads are dull. As it is
dull, the red image may not have many bright pixels and there
may not be sufficient to do the full inspection.
● However with fill pads, it takes this image with Angle 3 also. This
increases the brightness. This only changes the lighting for the
joint, hence there is no visible change on the image. There is no
increase in cycle time.

Copyright © ViTrox All Rights Reserved.
26
CR Type Algorithm - Joint (2D Only)
2. Joint Interpolate
● Enable this to include decimal place in pixel calculation.
● Value display in integer with converted from pixel decimal
calculation.
3. Joint size
● To adjust the joint inspection area.
● Yellow boxes shown below.
4. Joint Offset
● To adjust the joint boxes away from the component body.
Before After