Smart Gui - Algorithm Training Material_rev1.pdf - 第74页
Copyright © ViT rox All Rights Reserved . B-type Algorithm - Joint (Solder Profile Inspection) 74 4. Fillet Grey Thres Grey Thres Measured Grey Thres P ASS F AIL 5. Fillet Height Thres Height Thres (um) Measured Height(u…
Copyright © ViTrox All Rights Reserved.
B-type Algorithm - Joint (Solder Profile Inspection)
73
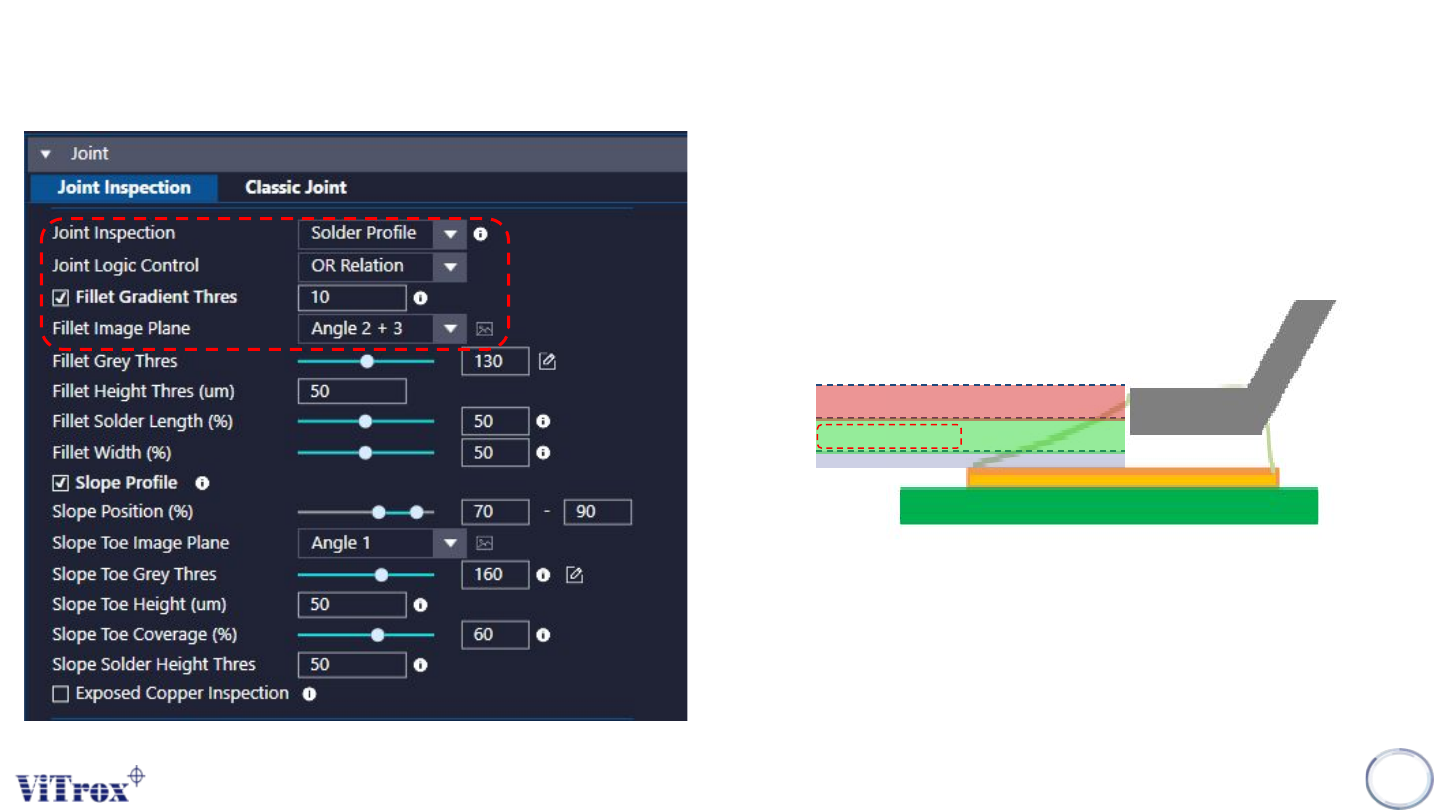
1. Joint Logic control
● OR Logic: Either 2D or 3D pass will consider as pass.
● AND Logic: 2D and 3D must be passed to consider as pass.
2. Fillet Gradient Thres
● To enable Fillet Gradient Inspection.
● Unit in degree.
Bumpy Detection
Slope Detection
Length Detection
3. Fillet Image Plane
● These are the types of 2D Lighting. Select the one with having
highest contrast among interested inspection region and the
background.
● Usually choose angle 2+3
Copyright © ViTrox All Rights Reserved.
B-type Algorithm - Joint (Solder Profile Inspection)
74
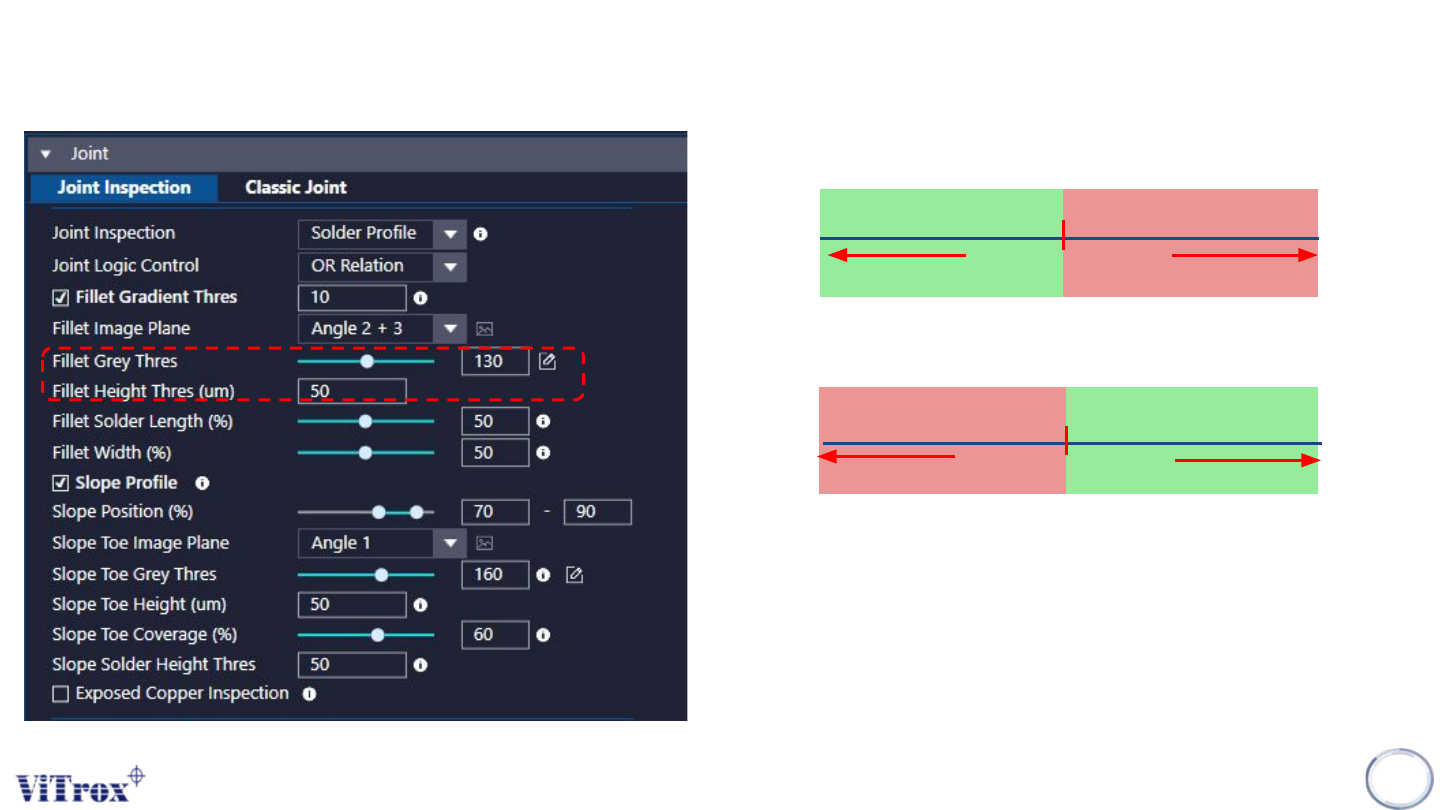
4. Fillet Grey Thres
Grey Thres
Measured Grey Thres
PASS
FAIL
5. Fillet Height Thres
Height Thres (um)
Measured Height(um)
PASS
FAIL
Copyright © ViTrox All Rights Reserved.
B-type Algorithm - Joint (Solder Profile Inspection)
75
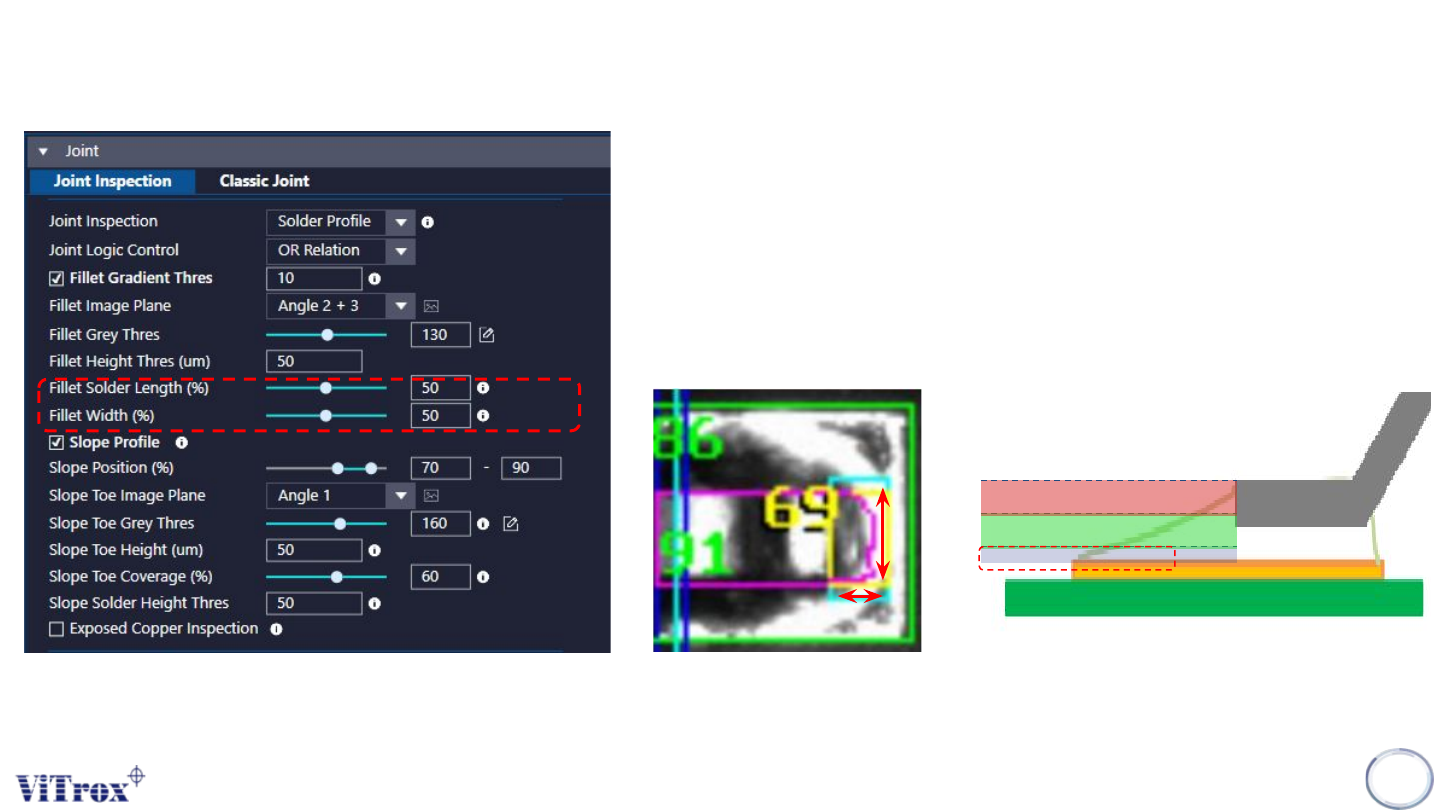
6. Fillet Solder Length (%) & Fillet Width (%)
● The overall pass criteria depends on:
a. Solder Width (%) > Solder Width Thres (%)
b. Solder Length (%) > Solder Length Thres (%)
c. Both solder Length and Solder Width must pass.
● Pass Criteria for single pixel:
a. Measured Grayscale < Joint Grey Thres
b. Solder Height (%) > Joint Height Thres (%).
c. OR Relation between 2D and 3D as pass criteria for single pixel
Width
Length
Bumpy Detection
Slope Detection
Length Detection