CAN Bus Workshop_Version 03__06-2008_EN.pdf - 第283页
1 - 75 Siplace C AN T est B ox Edition 04 /2008 1 CAN T est Box 75 1.10.9.1 1 CAN Bus Siplace X4I For the Sip lace X4I wi th stationsso ftware 70, onl y one conf igura tion dep ending on the su bsystem s is pos sible. Th…
1 - 74
Siplace CAN Test Box
1 CAN Test Box Edition 04/2008
74
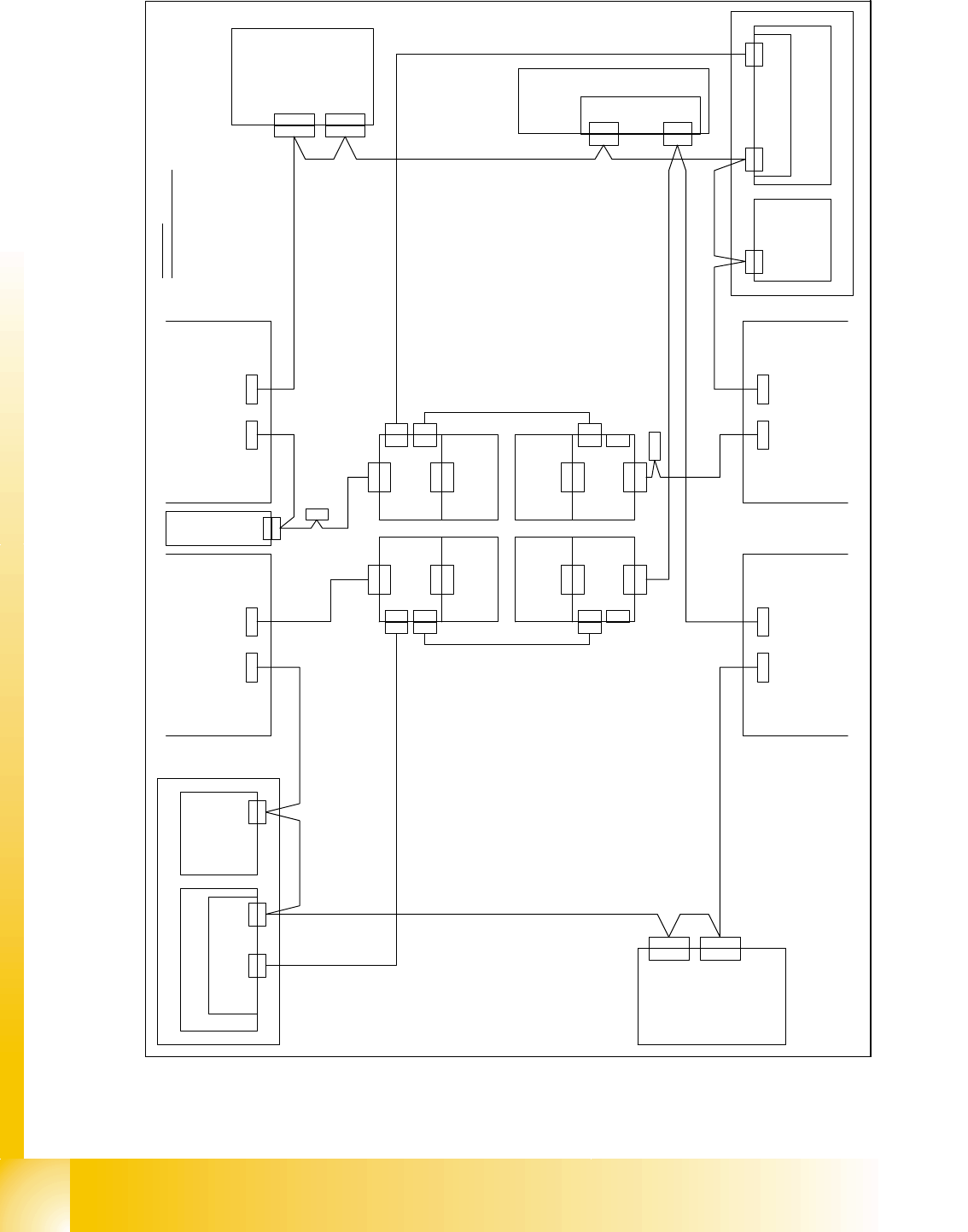
Fig. 1.10 - 50 CAN bus structure X4 variant 3
V i s i o n c o n t r o l
0 0 3 6 3 9 6 1 ( q d )
C A N
X 2 q d
X 2 q d
D o c k i n g u n i t 2 D o c k i n g u n i t 1
X 1 2 5X 1 2 6
C A N I NC A N O U T
X 1 1 5X 1 1 6
C A N I NC A N O U T
C A N
P C B c o n t r o l
X 2 2 a o
X 2 2 a o
C A N I / O - m o d u l e 0 0 3 5 5 0 5 1 ( q b )
0 3 0 1 0 0 5 0
C A N
0 3 0 1 0 0 5 1
X 2 r d
X 1 4 5
C A N I N
S o
A x i s u n i t
0 3 0 5 0 3 6 5
X 3 0 _ 2 s q
C A N
D o c k i n g u n i t 3
X 1 3 6
C A N O U T
X 4 0 c a
C A N
X 2 r d
C A N
V i s i o n c o n t r o l
0 0 3 6 3 9 6 1 ( r d )
D o c k i n g u n i t 4
( c a )
C a b l e c a r r i e r i n t e r f a c e
0 3 0 1 0 6 1 2
P 3
0 3 0 1 0 0 5 4
X 1 3 5
C A N I N
X 6 8
A m b i e n t p r e s s u r e s e n s o r
P n e u m a t i c u n i t
P l a c e m e n t a r e a 2
P l a c e m e n t a r e a 1
C A N b u s w i r i n g
w i r e n o . w i r i n g S u b - D - P I N
1 " 1 - W i r e " 1
2 G N D 6
3 C A N _ L 2
4 C A N _ H 7
5 G N D 3
6 R E S E T 8
7 P o w e r F a i l 4
8 f r e e 9
9
C A N _ I N T 5
C A N
X 3 0 _ 2 s q
X 3 0 _ 1 s q
X 3 0 _ 1 s q
X 3 0 _ 2 t q X 3 0 _ 1 t q
X 1 4 6
C A N O U T
C A N I / O m o d u l e 0 0 3 5 5 0 5 1 ( r b )
X 4 0 a a
( a a )
C a b l e c a r r i e r i n t e r f a c e
0 3 0 1 0 6 1 2
P 1
0 3 0 1 0 0 5 9
X 4 0 c a
X 4 0 b a
0 3 0 1 0 0 5 3
X 4 0 a a
X 1 r b
X 1 q bX 6 q f
X 6 q f
C A N
X 2 q f
I n t e r f a c e 1 - W i r e C A T 5 ( q f )
0 3 0 4 1 5 7 8
M a i n d i s t r i b u t o r 0 3 0 4 6 2 2 5 ( q a )
X 6 r f
X 6 r f
X 1 2 p n X 1 1 p n
X 7 p n
C A N c a r d
X 6 p n
C A N b u s 1C A N b u s 2
C A N
0 3 0 4 1 5 7 8
I n t e r f a c e 1 - W i r e C A T 5 ( r f )
X 2 r f
S u b d i s t r i b u t o r 0 3 0 4 6 2 2 6 ( r a )
S o
S o
S o
S o
S o
S o
S oS o
S o S o
S o
S o P i nP i n
P i n P i nS oS o
S o
S o
M a c h i n e
c o n t r o l l e r
0 3 0 5 2 0 3 2
0 3 0 5 7 1 4 5
P a t c h c a b l e 5 m
X 1 f e
0 3 0 5 7 1 4 5
P a t c h c a b l e 5 m
C A N
2 / 3
X 3 0 _ 2 t q X 3 0 _ 1 t q
C A N
0 3 0 1 0 0 5 2
X 3 0 _ 1 s q
s p a r e
X 4 0 d a
C A N
( d a )
C a b l e c a r r i e r i n t e r f a c e
0 3 0 1 0 6 2 2
P 4
X 4 h e
C A N I n
X 5 h e
X 2 h eX 1 h e
1 - W i r e C A T 5 g a n t r y
0 3 0 4 2 2 1 4 ( f e )
C A N I n
X 5 f e
X 4 f e
X 2 f e X 1 f e
X 4 k e
C A N I n
X 4 0 d a
S o
X 5 k e
X 2 k e
X 1 k e X 2 k e
S w i t c h p o s . : t o p
X 2 f e
C A N
X 4 0 b a
( b a )
C a b l e c a r r i e r i n t e r f a c e
0 3 0 1 0 6 2 2
P 2
X 1 g eX 2 g e
1 - W i r e C A T 5 g a n t r y
0 3 0 4 2 2 1 4 ( g e )
S w i t c h p o s . : t o p
C A N I n
X 5 g e
X 4 g e
X 2 g eX 2 h e
0 3 0 4 2 3 4 7
1 - w i r e b r i d g e
1 - W i r e C A T 5 g a n t r y
0 3 0 4 2 2 1 4 ( h e )
S w i t c h p o s . : b o t t o m
1 - W i r e C A T 5 g a n t r y
0 3 0 4 2 2 1 4 ( k e )
S w i t c h p
o s . : b o t t o m
0 3 0 4 2 3 4 7
1 - w i r e b r i d g e
A x i s u n i t 1 / 4
0 3 0 5 0 3 6 5
X 1 h e
1 - 75
Siplace CAN Test Box
Edition 04/2008 1 CAN Test Box
75
1.10.9.11 CAN Bus Siplace X4I
For the Siplace X4I with stationssoftware 70, only one configuration depending on the subsystems
is possible. That means, the tape cutter and the nozzle changer will be control via the VAN node
and it is not possible to install an MTC2 or stationäry cameras. Therefore we have only the CAN
Bus structure which you can see below.
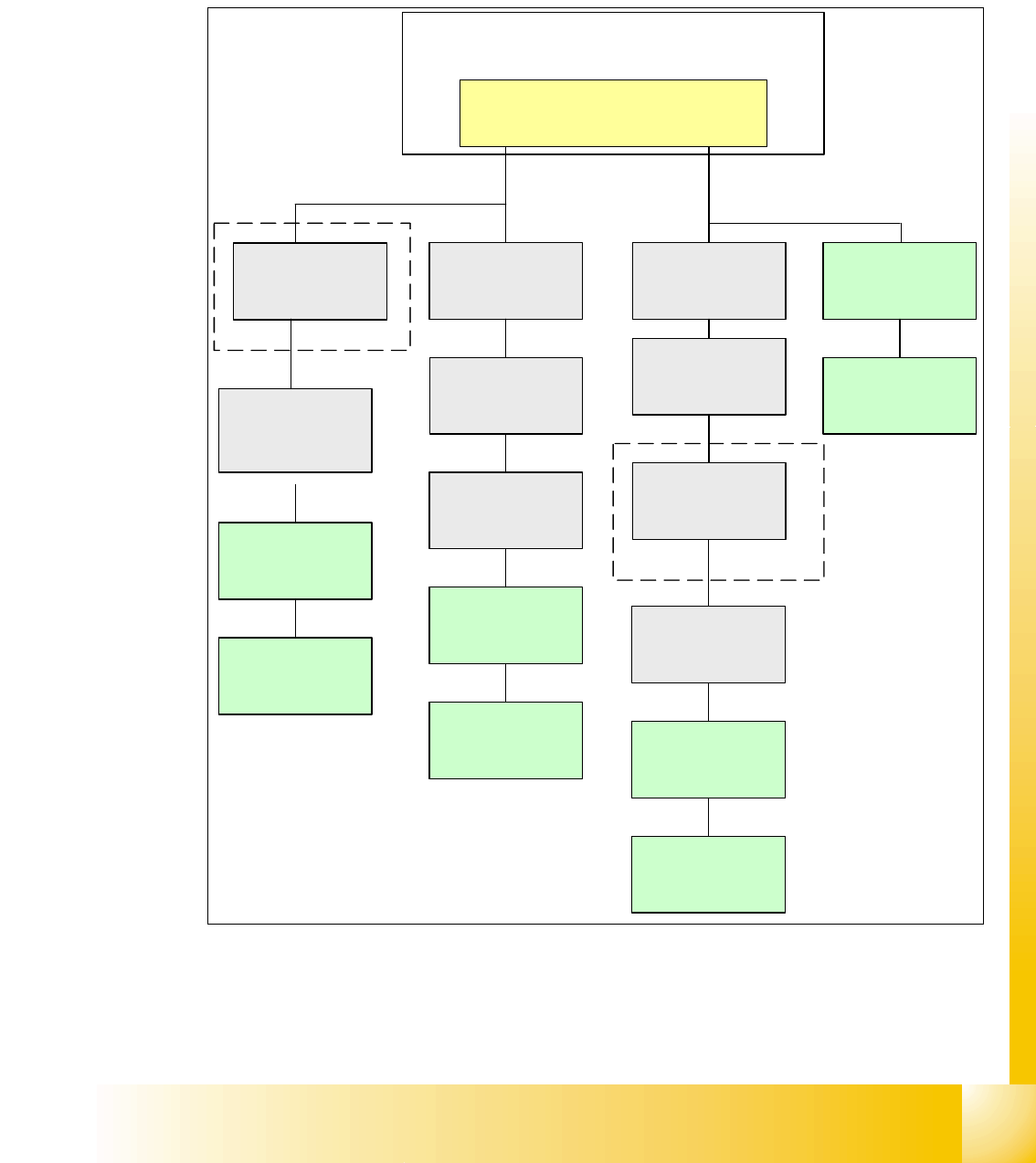
Fig. 1.10 - 51 CAN bus structure X4I
C
O
M
U
n
i
t
1
6
8
CAN Bus cable
PA 1
X6pn
Trailing Interface
Gantry 1
Transport
Control unit
COT 1
CAN node
(Tape cutter, NC)
Axis unit
PA 1
CAN I/O
Sub Module
SUB Distributor Sector 4
Trailing Interface
Gantry 4
Head board(C500)
Gantry 4
Terminator
(120 OHM)
Head board(C500)
Gantry 1
Terminator
(120 OHM)
CAN Bus cable
PA 2
X7pn
Main Distributor Sector 2
Axis unit
PA 2
CAN I/O
Main Module
COT 2
CAN node
(Tape cutter, NC)
Trailing Interface
Gantry 2
Trailing Interface
Gantry 3
Head board(C500)
Gantry 2
Terminator
(120 OHM)
Head board(C500)
Gantry 3
Terminator
(120 OHM)
COT 3
CAN node
(Tape cutter, NC)
COT 4
CAN node
(Tape cutter, NC)
Stationcomputer (Box PC)
1 - 76
Siplace CAN Test Box
1 CAN Test Box Edition 04/2008
76
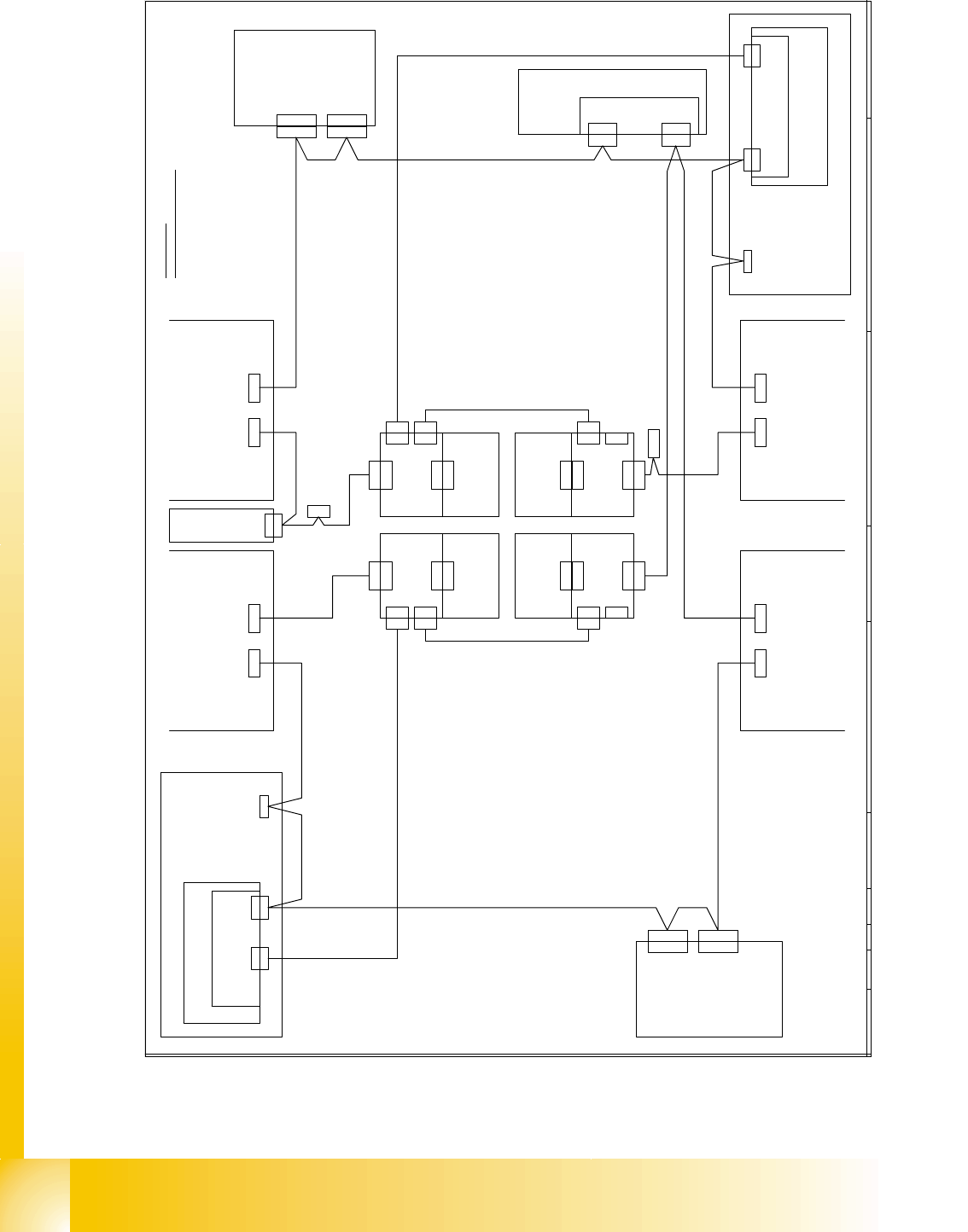
Fig. 1.10 - 52 CAN bus structure X4I
D a t e
D i 9
I t e m n a m e / B e n e n n u n g
0 5 0 7 2 0 0 7T k i1 7 1 2 0 74 0 3 4 9 5
X 2 q d
D o c k i n g u n i t 2 D o c k i n g u n i t 1
X 1 2 5X 1 2 6
C A N I NC A N O U T
X 1 1 5X 1 1 6
C A N I NC A N O U T
C A N
P C B c o n t r o l
X 2 2 a o
X 2 2 a o
C A N I / O - m o d u l e 0 0 3 5 5 0 5 1 ( q b )
0 3 0 1 0 0 5 0
C A N
0 3 0 1 0 0 5 1
X 2 r d
X 1 4 5
C A N I N
A x i s u n i t
0 3 0 5 0 3 6 5
X 3 0 _ 2 s q
C A N
D o c k i n g u n i t 3
X 1 3 6
C A N O U T
X 4 0 c a
C A N
D o c k i n g u n i t 4
( c a )
C a b l e c a r r i e r i n t e r f a c e
0 3 0 1 0 6 1 2
P 3
0 3 0 1 0 0 5 4
X 1 3 5
C A N I N
X 6 8
A m b i e n t p r e s s u r e s e n s o r
P n e u m a t i c u n i t
P l a c e m e n t a r e a 2
P l a c e m e n t a r e a 1
C A N b u s w i r i n g
w i r e n o . w i r i n g S u b - D - P I N
1 " 1 - W i r e " 1
2 G N D 6
3 C A N _ L 2
4 C A N _ H 7
5 G N D 3
6 R E S E T 8
7 P o w e r F a i l 4
8 f r e e 9
9
C A N _ I N T 5
C A N
X 3 0 _ 2 s q
X 3 0 _ 1 s q
X 3 0 _ 1 s q
X 3 0 _ 2 t q X 3 0 _ 1 t q
X 1 4 6
C A N O U T
C A N I / O m o d u l e 0 0 3 5 5 0 5 1 ( r b )
X 4 0 a a
( a a )
C a b l e c a r r i e r i n t e r f a c e
0 3 0 1 0 6 1 2
P 1
0 3 0 1 0 0 5 9
X 4 0 c a
X 4 0 b a
0 3 0 1 0 0 5 3
X 4 0 a a
X 1 r b
X 1 q bX 6 q f
X 6 q f
C A N
X 2 q f
I n t e r f a c e 1 - W i r e C A T 5 ( q f )
0 3 0 4 1 5 7 8
M a i n d i s t r i b u t o r 0 3 0 4 6 2 2 5 ( q a )
X 6 r f
X 6 r f
X 1 2 p n X 1 1 p n
X 7 p n
C A N c a r d
X 6 p n
C A N b u s 1C A N b u s 2
C A N
0 3 0 4 1 5 7 8
I n t e r f a c e 1 - W i r e C A T 5 ( r f )
X 2 r f
S u b d i s t r i b u t o r 0 3 0 4 6 2 2 6 ( r a )
S o
S o
S o
S o
S o
S o
S oS o
S o S o
S o
S o P i nP i n
P i n P i nS o
S o
S o
M a c h i n e
c o n t r o l l e r
0 3 0 5 2 0 3 2
C A N
2 / 3
X 3 0 _ 2 t q X 3 0 _ 1 t q
C A N
0 3 0 1 0 0 5 2
X 3 0 _ 1 s q
s p a r e
X 4 0 d a
C A N
( d a )
C a b l e c a r r i e r i n t e r f a c e
0 3 0 1 0 6 2 2
P 4
X 4 h e
C A N I n
X 5 h e
X 2 h eX 1 h e
1 - W i r e C A T 5 g a n t r y
0 3 0 4 2 2 1 4 ( f e )
C A N I n
X 5 f e
X 4 f e
X 2 f e X 1 f e
X 1 f e
X 4 k e
C A N I n
X 4 0 d a
S o
X 5 k e
X 2 k e
X 1 k e X 2 k e
S w i t c h p o s . : t o p
X 2 f e
C A N
X 4 0 b a
( b a )
C a b l e c a r r i e r i n t e r f a c e
0 3 0 1 0 6 2 2
P 2
X 1 g eX 2 g e
1 - W i r e C A T 5 g a n t r y
0 3 0 4 2 2 1 4 ( g e )
S w i t c h p o s . : t o p
C A N I n
X 5 g e
X 4 g e
X 2 g eX 2 h e
0 3 0 4 2 3 4 7
1 - w i r e b r i d g e
X 1 g e
1 - W i r e C A T 5 g a n t r y
0 3 0 4 2 2 1 4 ( h e )
S w i t c h p o s . : b o t t o m
1 - W i r e C A T 5 g a n t r y
0 3 0 4 2 2 1 4 ( k e )
S w i t c h p
o s . : b o t t o m
0 3 0 4 2 3 4 7
1 - w i r e b r i d g e
A x i s u n i t 1 / 4
0 3 0 5 0 3 6 5
0 3 0 5 7 1 4 5
P a t c h c a b l e 5 m
0 3 0 5 7 1 4 5
P a t c h c a b l e 5 m