CAN Bus Workshop_Version 03__06-2008_EN.pdf - 第31页
1 - 5 S tudent Guide CAN BUS W orkshop Edition 0 6 /2008 2 Comm unication and Control 5 Fig. 2.1 - 3 Communication overv iew Siplace X4I with SW70x.xx


1 - 6
Student Guide CAN BUS Workshop
2 Communication and Control Edition 06/2008
6
2.2 CAN Bus
The development of CAN began when more and more electronic devices were implemented into
modern motor vehicles. Examples of such devices include engine management systems, active
suspension, ABS, gear control, lighting control, air conditioning, airbags and central locking. All
this means more safety and more comfort for the driver.
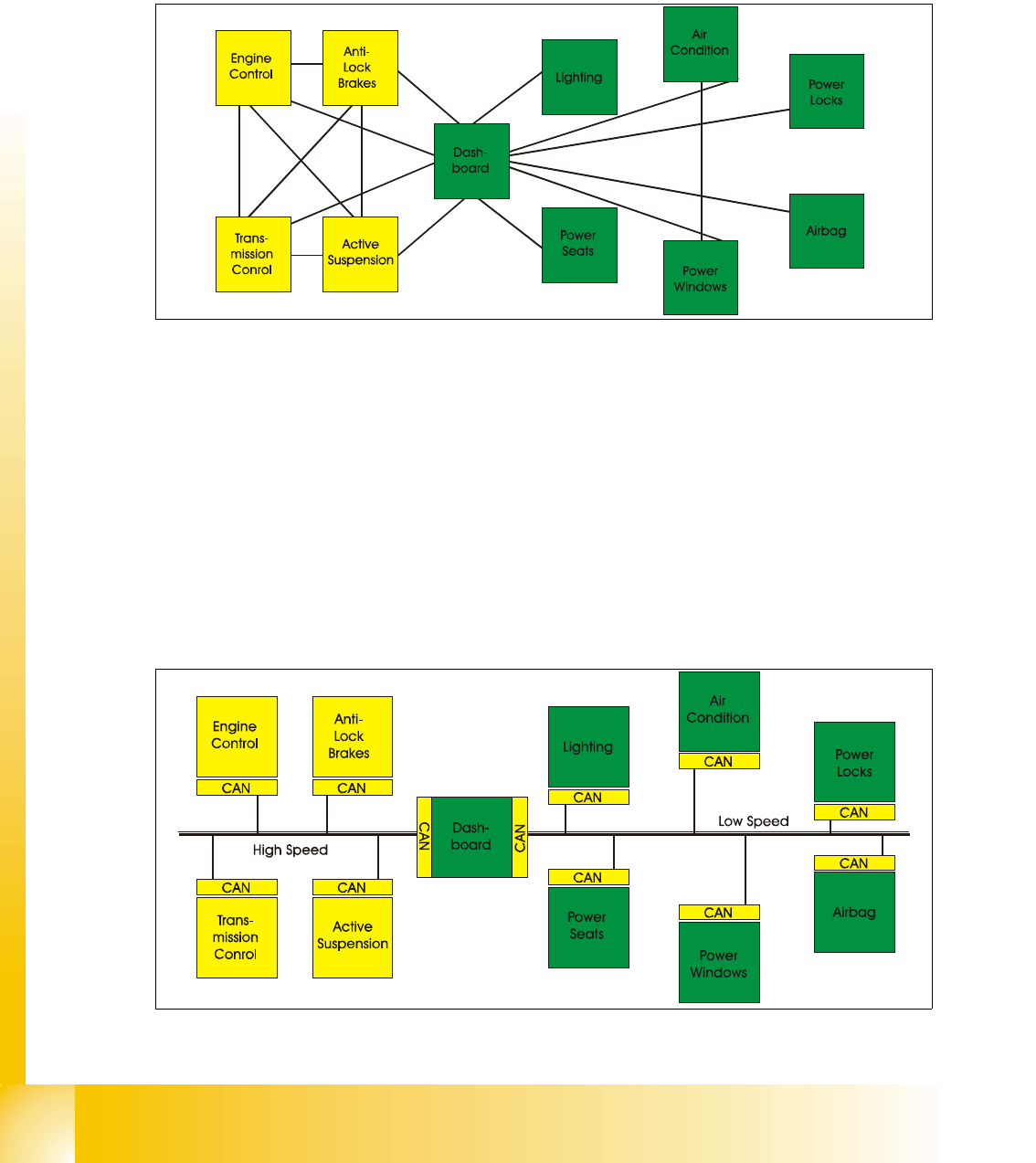
Fig. 2.2 - 1 communication via cable connection
To improve the behavior of the vehicle even further, it was necessary for the different control sys-
tems (and their sensors) to exchange information. This was usually done by discrete interconnec-
tion of the different systems (i.e. point to point wiring). The requirement for information exchange
has then grown to such an extent that a cable network with a length of up to several miles and
many connectors was required. This produced growing problems concerning material cost, pro-
duction time and reliability.
The solution to this problem was the connection of the control systems via a serial bus system.
This bus had to fulfill some special requirements due to its usage in a vehicle. With the use of CAN,
point-to-point wiring is replaced by one serial bus connecting all control systems. This is accom-
plished by adding some CAN-specific hardware to each control unit that provides the ’rules’ or pro-
tocol for transmitting- and receiving information via the bus.
Fig. 2.2 - 2 Communication via CAN bus on example car controlling