CAN Bus Workshop_Version 03__06-2008_EN.pdf - 第66页
1 - 4 S tudent Gu ide CAN BUS Wor kshop 3 CAN BU S Editio n 06/200 8 4 3 Dat um 06 /20 08 Vers io n 0 3 C A N B u s W o rks h op M at h i a s Mic hel SIPL ACE Ca mp us Automati on and Driv es 1. CAN BUS Si plac e P recon…
1 - 3
Student Guide CAN BUS Workshop
Edition 06/2008 3 CAN BUS
3
3 CAN BUS
Logistics & Assembly Systems
Siplace CAN BUS Workshop
2Datum06/2008 Version 03 CAN Bus Workshop Mathias Michel
SIPLACE Campus
Automation and Drives
Overview
1. CAN Bus Preconditions
2. CAN BUS in general
3. Checking Can Bus
4. CAN Bus Structures Siplace HF, X-Series and D-Series
5. One Wire Bus
6. Board type recognition
CAN Bus Workshop
1 - 4
Student Guide CAN BUS Workshop
3 CAN BUS Edition 06/2008
4
3Datum06/2008 Version 03 CAN Bus Workshop Mathias Michel
SIPLACE Campus
Automation and Drives
1. CAN BUS Siplace
Preconditions
Multimeter, Oscilloscope
CAN Testbox 03043645-01
Service Laptop with the SW Caccia
00349514-01 Kvaser Card for Laptop
00349679-03 Testcable for CAN Bus 2x
00349676-01 CAN Cable (Receiver) 2x
00194932-11 Manual CAN Test Box
1. CAN BUS Siplace
4Datum06/2008 Version 03 CAN Bus Workshop Mathias Michel
SIPLACE Campus
Automation and Drives
CAN is a serial bus system with Multimaster features.
The CAN network does not consist of addressing individual components in
the conventional sense but all messages will send to all subsystems
(broadcasting).
Each subsystem decides on the basis of the identifier received whether it
should process the message or not.
2. CAN BUS Allgemeiner Aufbau
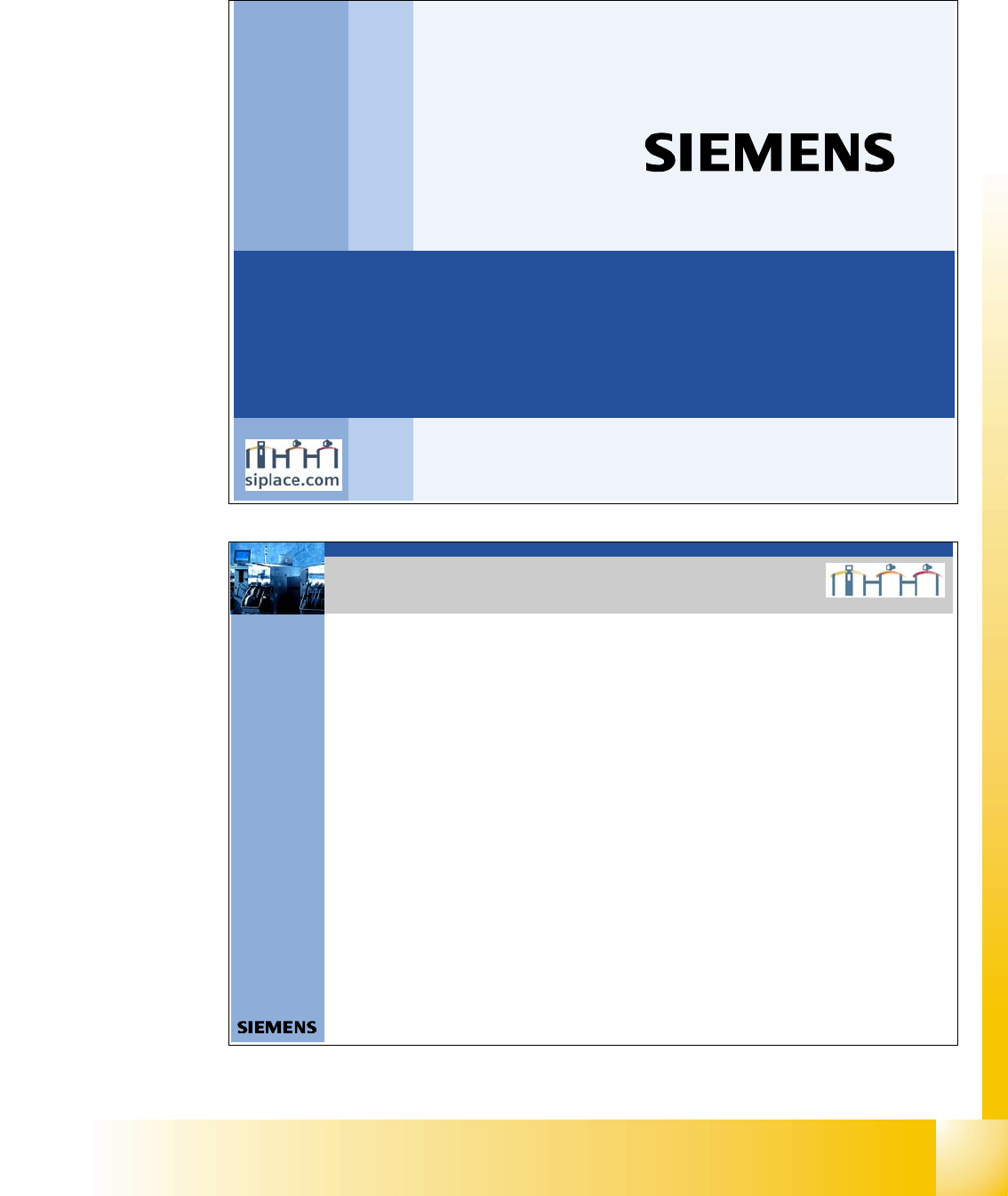
2. CAN BUS in general
The data are transmitted via the differential voltage of the two CAN_High and
CAN_Low lines, which are each fitted with a terminating resistance of 120 Ohm.
1 - 5
Student Guide CAN BUS Workshop
Edition 06/2008 3 CAN BUS
5
5Datum06/2008 Version 03 CAN Bus Workshop Mathias Michel
SIPLACE Campus
Automation and Drives
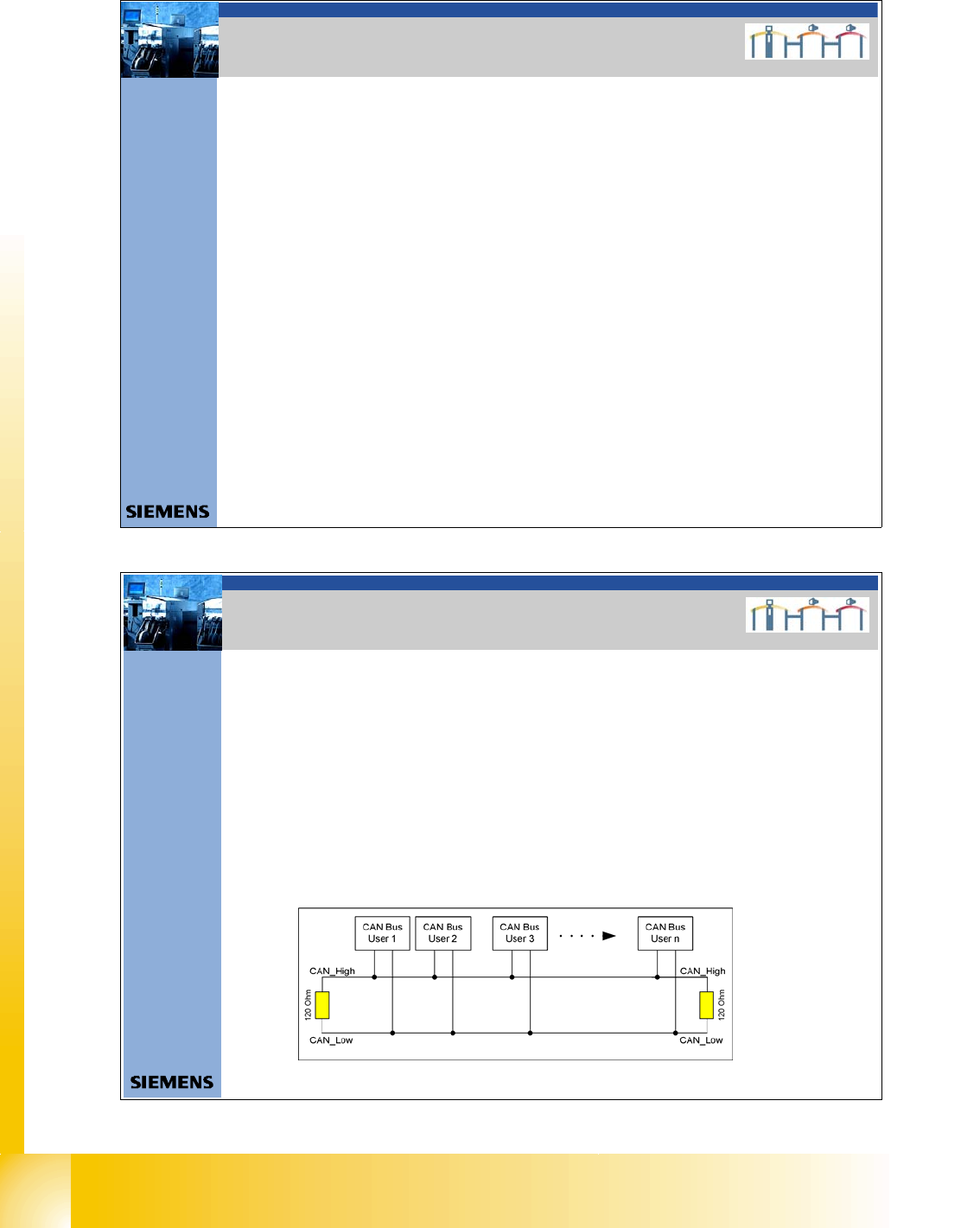
Each bus node has a CAN controller, which can transmit and receive data if
the bus is free.
This CAN controller communicates with a microcontroller. The microcontroller
steers and controls the relevant CAN bus nodes.
A CAN Bus node can only transmit if the bus is free i.e. if there is no
communication taking place with other nodes. Access to the CAN BUS is
fixed in the CAN protocol (identifier). This results in differing priorities among
the individual CAN bus nodes.
.
Function:
Microcontroller:- communicate to CAN Controller
- control the sensors, actuators and
control the function depend of the
Application.
CAN Controller: - add the data frame,
- built the connection to the
ComBoard
- Error handling
Transmitter/
Receiver: - adapt the level and amplify the
signal
2. CAN BUS Allgemeiner Aufbau
2. CAN BUS in general
6Datum06/2008 Version 03 CAN Bus Workshop Mathias Michel
SIPLACE Campus
Automation and Drives
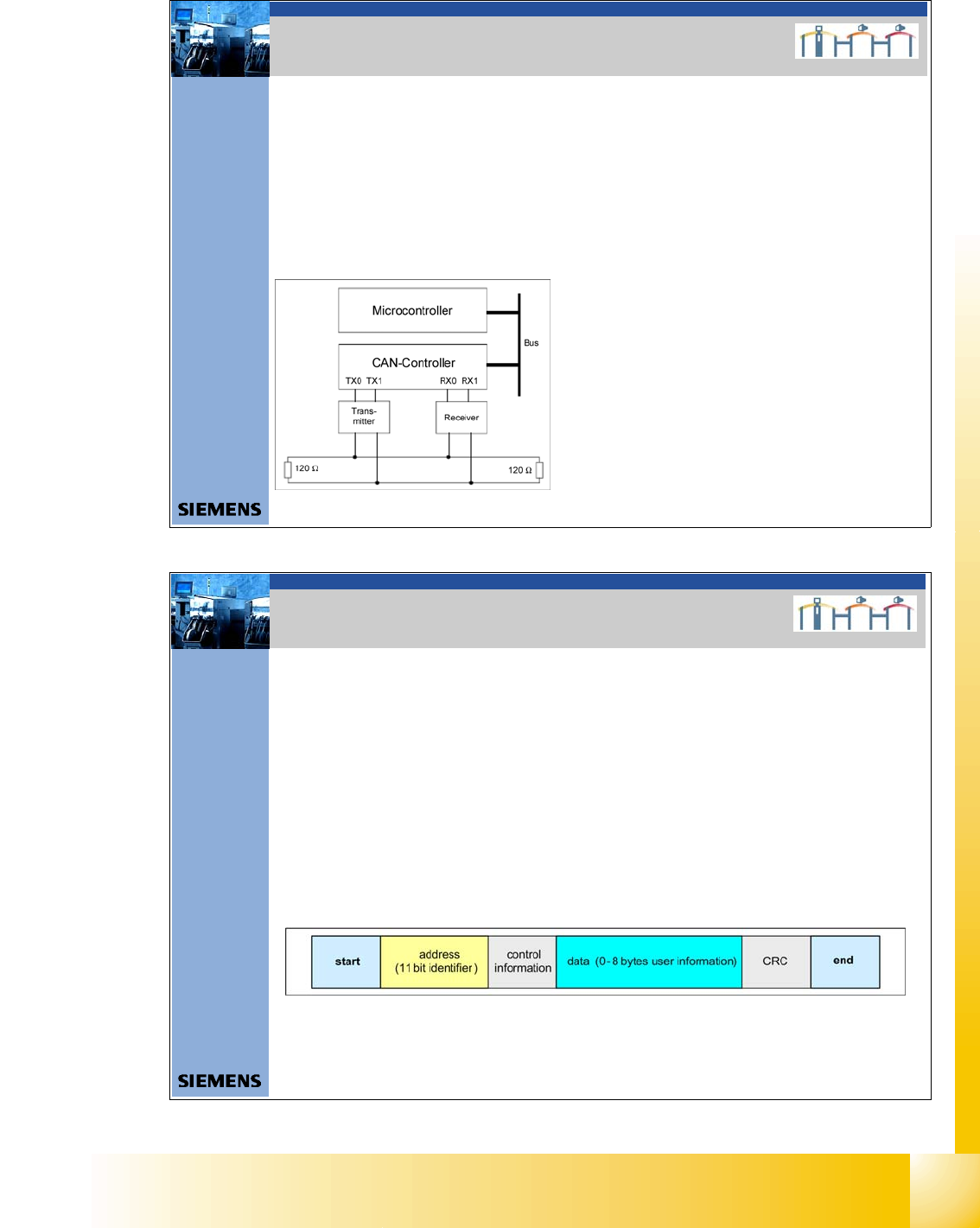
CAN-Telegram:
A CAN Telegram contains 0 up to 8 Datenbytes.
In the Siplace CAN Bus an 11 Bit Identifier (Address) identified the message.
(which kind of message, priority, source and / or target).
Therfore the Identifier control the access to the bus (Arbitrierung).
The identifier determines the priority of the messages, messages with high
priority will send directly and the others with delay.
CAN Bus systems can work with 11bit (Machine CAN BUS) or 29 bit (Sub
CAN Bus e.g. CAN node) Identifier.
2. CAN BUS Allgemeiner Aufbau
2. CAN BUS in general