CAN Bus Workshop_Version 03__06-2008_EN.pdf - 第37页
1 - 1 1 S tudent Guide CAN BUS W orkshop Edition 0 6 /2008 2 Comm unication and Control 11 2.2.2 CAN Bus Concept S iplace X4 Note: In SIPLACE X machin es, the m achin e cont roller is a box PC. This also contains the COM…
1 - 10
Student Guide CAN BUS Workshop
2 Communication and Control Edition 06/2008
10
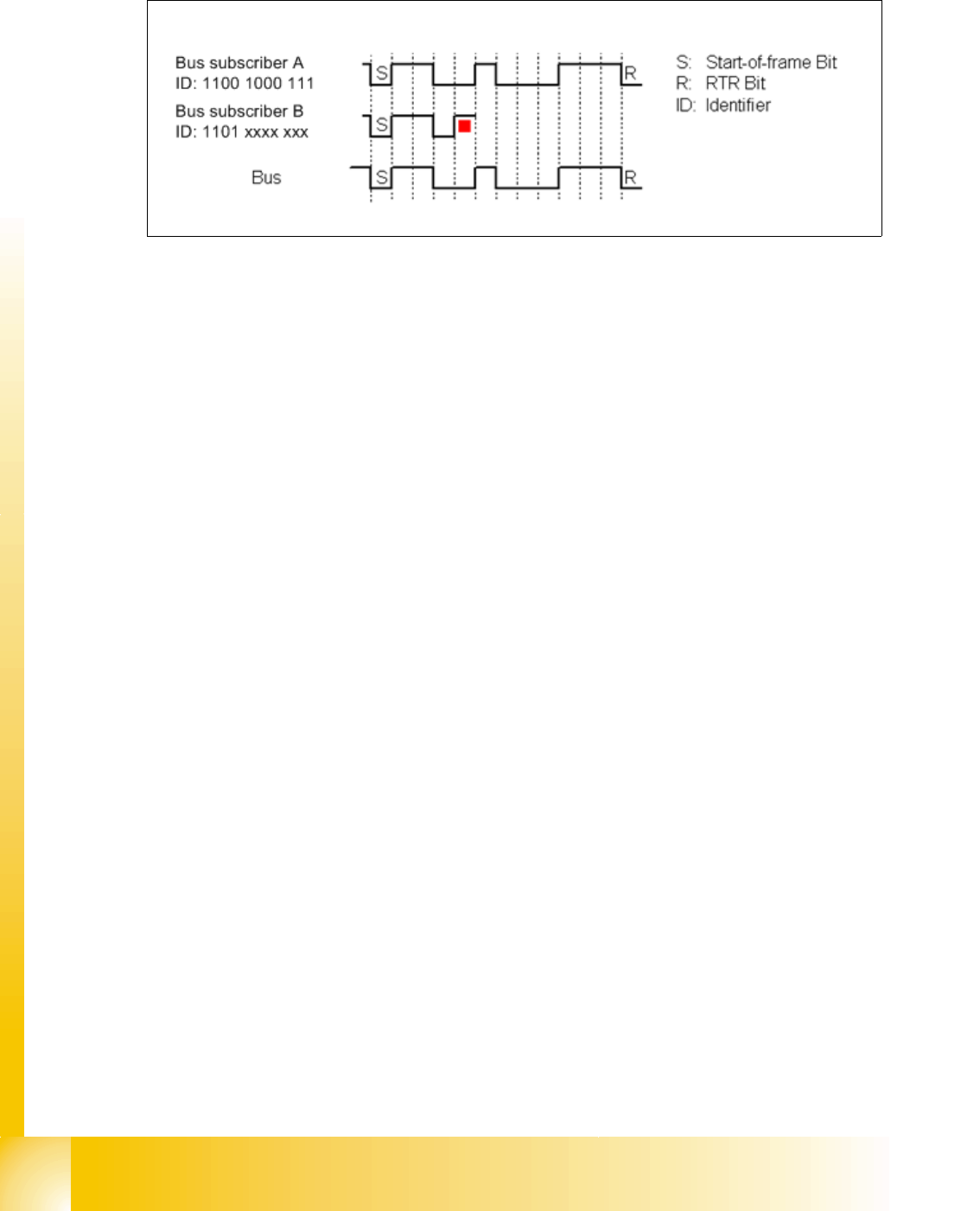
Example: Arbitration with bit by bit detection of 2 members.
Fig. 2.2 - 8 CAN- bus arbitration with 2 members
If bus subscriber A and B want to transmit, they begin to do so after the start-of-frame bit and
compare in each case the bits sent and received. Since"0" dominates on the bus, bus subscriber
B recognizes that the fourth bit differs from the bits sent and therefore withdraws from the bus until
the next start-of-frame. Bus subscriber A does not recognize a difference and therefore continues
to transmit. Messages with high priority therefore have an identifier which begins with several "0"s.
There are two bus states possible during arbitration: dominant and recessive.
2.2.1.4 Errors on the CAN Bus
Error frames
What are error frames?
Error frames are sent by the individual subsystems, if a command does not correspond with the
coding rules or if it has been corrupted i.e. when a CAN telegram has 6 or more consecutive bits
with the same level (high or low).
If a command is recognized by a subscriber, this subscriber immediately informs the other sub-
scribers and the telegram sender, by issuing an error frame.
Upon receipt of the error frame, all subscribers reject the telegram received and begin to send
their own error frames.
Once the bus is free again, the commend is resent.
If multiple error frames are issued, this indicates that a physical bus error has occurred. If too
many error frames are recognized during operation, a detailed analysis of the CAN signals is re-
quired.
1 - 11
Student Guide CAN BUS Workshop
Edition 06/2008 2 Communication and Control
11
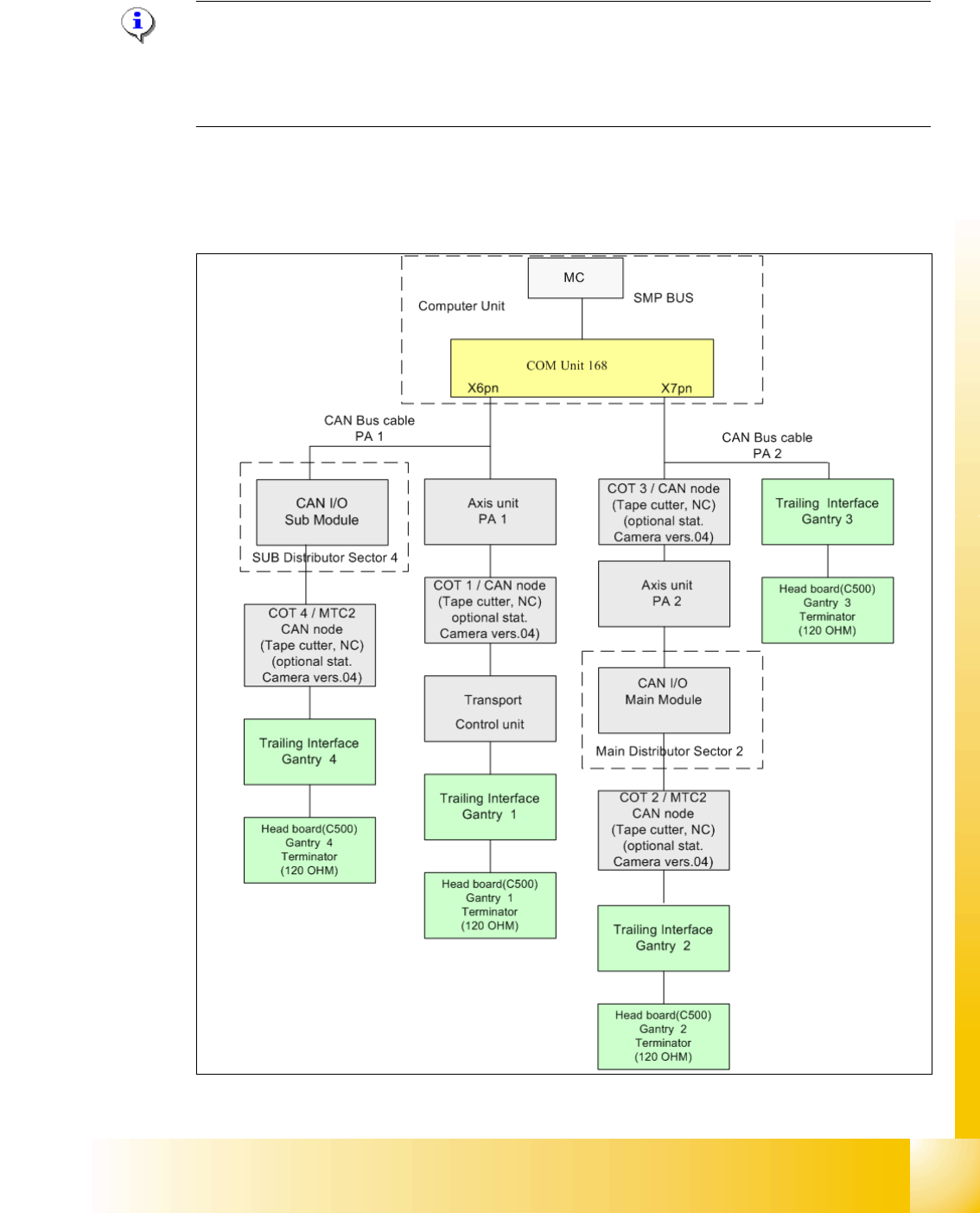
2.2.2 CAN Bus Concept Siplace X4
Note: In SIPLACE X machines, the machine controller is a box PC. This also contains the COM
unit. From approx. 2008 machines will not have separate illumination control as this is realized in
the stationary cameras from version 4 onwards. The NCs are addressed and the sensors moni-
tored by the CAN node module. The NC is therefore reintegrated into the CAN bus system.
The placement machine SIPLACE X uses a bus system with 1 Mbit/s transmission rate.The CAN:
Bus system begin at the Communication board and is split in 2 path. Every path is terminated by
a 120 ohm terminator on the head board at the individual placement head.
Fig. 2.2 - 9 CAN Bus overview Siplace X4
1 - 12
Student Guide CAN BUS Workshop
2 Communication and Control Edition 06/2008
12
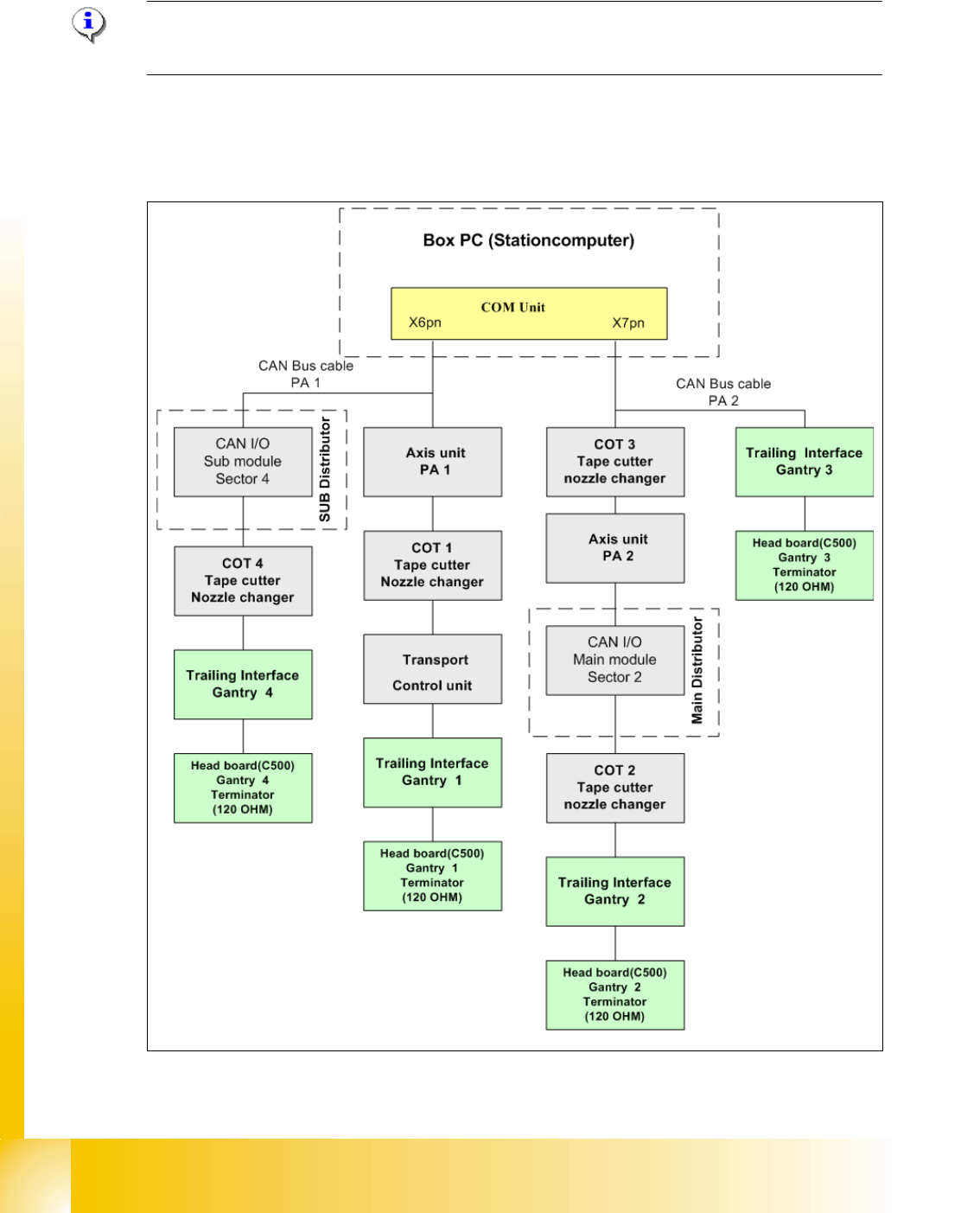
2.2.3 CAN Bus Concept Siplace X4I
Note: For the Siplace X4I and only with the SW 70x, there is only one station computer, which
assumes control of the entire machine.
The placement machine SIPLACE X4I uses a bus system with 1 Mbit/s transmission rate.The
CAN: Bus system begin at the Communication board and is split in 2 path. Every path is termi-
nated by a 120 ohm terminator on the head board at the individual placement head.
Fig. 2.2 - 10 CAN Bus overview Siplace X4I