SI-F130_操作说明.pdf - 第188页
操作篇 操作篇 操作篇 操作篇 5. 手动操作 5-22 SI-F130 (3) 微調動作移動 ( 微调动作移动 ) (轨道宽度) 指定微调动作移动 时,会出现以下的 軌道寬度 調整 ( 轨道宽度调整 ) 对话框。 图 5.2. 1.7-2 軌道寬度 調整 ( 轨道宽度调 整 ) 画面 轨道宽度移动的顺 序如下。 [1] 指定移动速度。 以下的 2 种方法可指定移动速度。 方法 1 :按键盘的 SHIFT 键。 方法 2 :点击 高速 …
操作篇
操作篇操作篇
操作篇
5. 手动操作
SI-F130
5-21
(1) 絕對座標移動 ( 绝对坐标移动 ) (轨道宽度)
在
軌道寬度絕對位置 ( 轨道宽度绝对位置 ) 框中操作 ▲ ▼ 的调整钮 , 指定目标宽度。
按操作面板的
START 钮。移动轨道至目标宽度。
轨道移动中,按操作面板的
STOP
钮时,立即停止。再次按
START
钮时,再开始移动至目
标位置。但是,使用手动控制器移动轴时,按
STOP
键停止移动后,若不再次设定目标位置,
则即使按
START
钮亦不移动,故需要注意。
(2) 相對座標移動 ( 相对坐标移动 ) (轨道宽度)
操作
▲ ▼ 的调整钮,指定由现在轨道宽度开始移动的距离。
按操作面板的
START 钮时,轨道只移动指定的距离。
正
(+) 值时轨道宽度变大、负 (-) 值时轨道宽度变窄。
轨道移动中,按操作面板的
STOP
钮时,立即停止。再次按
START
钮时,再开始移动至目
标位置。
注意
注意注意
注意 :
注意
注意注意
注意 :
操作篇
操作篇操作篇
操作篇
5. 手动操作
5-22
SI-F130
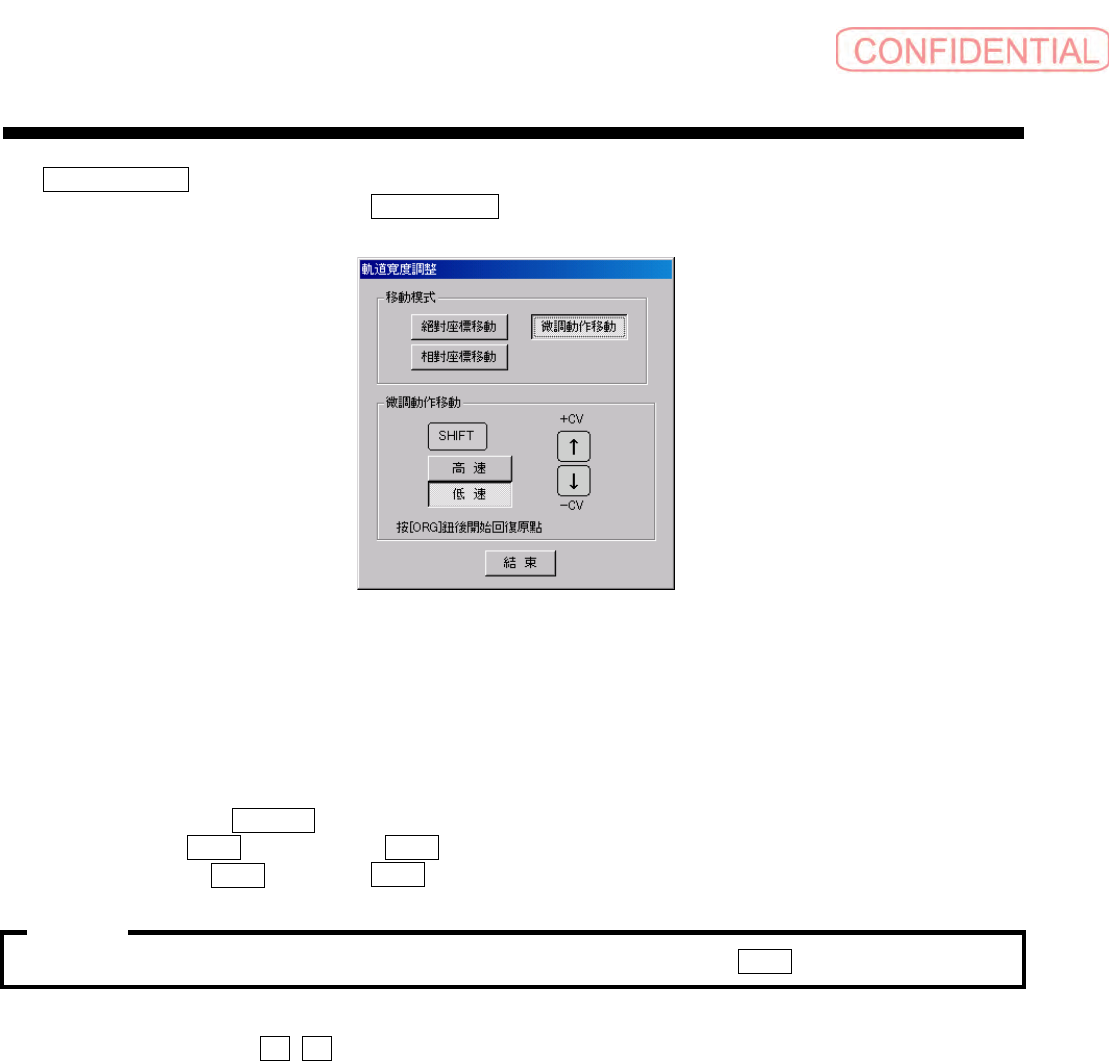
(3) 微調動作移動 ( 微调动作移动 ) (轨道宽度)
指定微调动作移动时,会出现以下的
軌道寬度調整 ( 轨道宽度调整 ) 对话框。
图
5.2.1.7-2
軌道寬度調整
(
轨道宽度调整
)
画面
轨道宽度移动的顺序如下。
[1] 指定移动速度。
以下的
2 种方法可指定移动速度。
方法
1:按键盘的 SHIFT 键。
方法
2:点击 高速 ( 高速 ) 钮或 低速 ( 低速 ) 钮。
→指定 高速 ( 高速 ) / 低速 ( 低速 ) 的切换。
前门或后门中任一门打开
,
或互锁开关关闭时
,
为了安全
,
无法选择
高速
(
高速
)
。
[2] 按键盘的游标 ( ↑ ↓ )
→
往按下的游标方向移动轨道。有时按游标键其轨道却无反应,此时若改变按键时机即可操作。
提示
·
按游标立即放开时,只稍稍移动 1 点 ( 寸移动 )。
· 按着游标时,轨道则连续移动。
注意
注意注意
注意 :

操作篇
操作篇操作篇
操作篇
5. 手动操作
SI-F130
5-23
5.2.1.8 基板搬送状态的表示
基板搬送状态的表示基板搬送状态的表示
基板搬送状态的表示
在基板搬送画面,用表示色表示当前的状态。
·关于轨道皮带的表示颜色:
绿色:向搬出方向移动
白色:停止
黄色:向搬入方向移动
·关于各按钮的文字颜色:
黑色:可以操作
灰色:不能操作
·装在轨道上的基板用绿色表示。
·固定板上的用多孔的灰色长方形表示。
·关于固定板、基准梢、停止器、夹板的表示颜色:
黄色:表示处于上升界限
白色:表示处于下降界限
·关于安装在轨道上的下述感应器开关状态的表示:
红色
LED 标记是
明亮状态:开
灰暗状态:关
基板搬入感应器
利用设置在基板搬入轨道入口的光学式感应器,检测能从前装置搬送来的基板。
基板搬出感应器
利用设置在基板搬出轨道出口的光学式感应器,检测可否在后装置搬送基板。
基板待机感应器
利用设置在基板搬入轨道出口的光学式感应器,检测可否在装着轨道搬送基板。
基板确认感应器
利用设置在基板装着轨道的装着位置的光学式感应器,检测是否可能从装着轨道到搬出轨道搬送
基板,固定板是否可以上升。
基板有无感应器
利用设置在基板装着轨道的装着位置的光学式感应器,检测固定板是否可以上升,是否可以矫正
装着基板。
基板确认通过感应器
利用设置在基板搬出轨道入口的光学式感应器,检测从装着轨道搬送来的基板。